 如何使用泰克8通道5系列B MSO示波器進行測量
如何使用泰克8通道5系列B MSO示波器進行測量

本指南將介紹如何使用泰克8通道5系列B MSO示波器的逆變器、電機和驅動器分析軟件對變頻驅動器的輸入、直流母線和輸出進行穩定、準確的電氣測量,以及對電機進行機械測量。
大多數現代電機驅動系統使用某種調制形式來控制電機頻率,從而控制電機速度。在大多數情況下,此類變頻驅動器 (VFD) 通過輸出精心控制的脈沖寬度調制 (PWM)波形來實現這一點。此類系統通常以三相形式輸出功率,因為三相是電機的最佳配置。
自電氣工程誕生以來,三相交流感應電機(ACIM) 一直是工業領域的主力。它們可靠、高效、成本低且幾乎不需要維護。但電機和驅動器有多種不同類型。交流感應電機(ACIM) 的效率低于無刷直流電機 (BLDC) 和永磁同步電機 (PMSM)。與交流感應電機相比,同步無刷直流電機和永磁同步電機效率更高,重量也更輕,但需要更先進的控制算法。
盡管每種類型的電機驅動系統有其獨特的特性,但電機驅動器都使用脈沖寬度調制技術來改變輸送到電機的頻率和電壓。
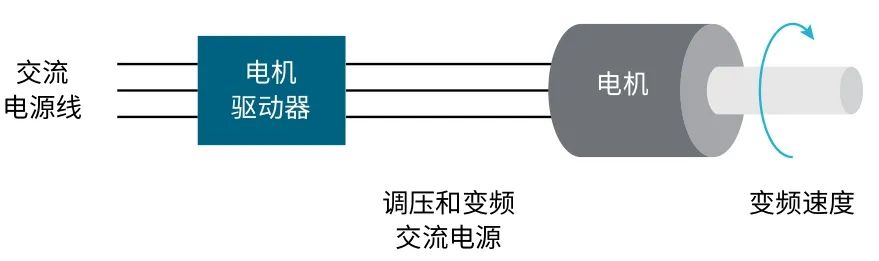
圖1. 電機驅動器通過調節電機輸入來控制電機速度和扭矩
對電機驅動器進行測量的挑戰
由于電機驅動器輸出采用脈沖寬度調制技術,因此,要對這種信號進行穩定的測量具有挑戰性。要想實現穩定的波形,通過人工確定濾波器和觸發器的正確組合非常棘手,但對于實現一致測量卻是必要的。
除了測量驅動器的輸出之外,對驅動器的輸入級性能(例如諧波、功率和功率因數)進行測量和評估也很重要。雖然可以將原始波形導出到電子表格或其他分析軟件中,但該過程非常耗時,并且設計算法時要特別注意。
進行這些測量需要與被測設備建立許多連接。錯誤的探頭連接和連接點完整性差是導致電機驅動器測量誤差的常見原因。
機械測量也很關鍵,可以使用傳感器進行。然而,如果不進行自定義處理和轉換,要想獲取以工程單位表示的速度、加速度或扭矩的測量值可能非常困難,甚至是不可能。
由于這些原因,要想使用示波器對電機驅動系統進行良好的測量,需要仔細的設置、穩定的波形和強大的測量算法。
PWM電機驅動器的工作原理
多種類型的電機采用脈沖寬度調制 (PWM) 形式驅動,包括有刷直流電機、交流感應電機、無刷直流電機和永磁同步電機。PWM使驅動器能夠改變輸送到電機的頻率和電壓。
盡管很多年前人們就已經掌握PWM驅動器的工作原理,但卻是功率半導體、控制電子組件和微處理器的改進和成本的降低才推動了此類驅動器的廣泛使用。矢量控制技術進一步推動了這一趨勢。通過矢量控制,設計者能夠在交流電機的高可靠性基礎上,實現直流電機的高效率和精確可控性。無刷直流電機和永磁同步電機正在廣泛應用領域取代有刷直流電機和交流感應電機,這些領域不僅包括工業應用,還包括電動工具、家用電器和電動汽車。
圖2顯示了三相變頻驅動器基本元件的框圖。
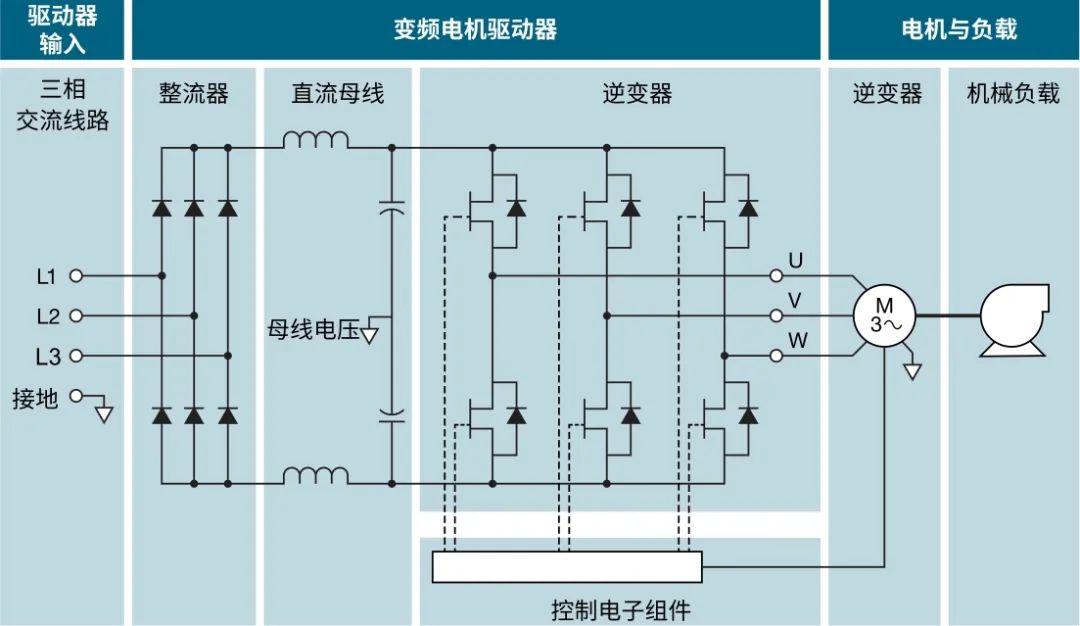
圖2. 三相電機驅動器功能模塊圖
PWM驅動器可以由直流電、單相交流電或三相交流電供電。圖2顯示了一臺由三相電源供電的變頻驅動器,三相電源常用于工業設備。三相電源經過整流和濾波產生直流母線,為驅動器的逆變器部分供電。逆變器由三對半導體開關(MOSFET、GTO、功率晶體管、IGBT等)及其相關二極管組成。每對開關分別為電機的一相提供電源輸出。這種基本架構可以適用于多種類型的電機,但控制電子組件在反饋和復雜性方面差異很大。這里簡單介紹幾種常見的用于驅動電機的PWM形式。
六步換相 / 梯形波控制驅動器
這種類型的驅動器與無刷直流電機結合使用。無刷直流電機效率高且體積小。它具有直流電機的優點,但沒有電刷,不易磨損。無刷直流電機可以通過相對簡單的六步換相(或梯形波控制)PWM策略來實現電子換向。下圖顯示了一組典型的PWM波形。
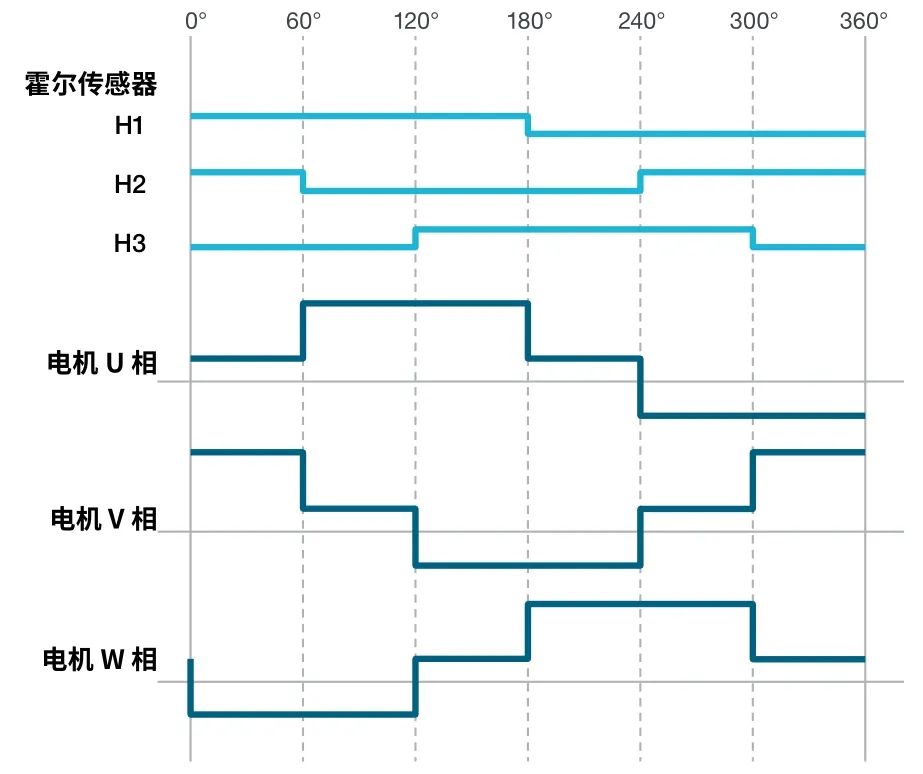
圖3. 霍爾傳感器向簡單的六步控制器提供反饋。驅動器U、V和W輸出信號應用于電機定子
標量控制驅動器
簡單的變頻驅動器驅動交流感應電機,通過改變驅動電機的PWM波形的基頻來控制電機速度。為了保持全扭矩,驅動器中的控制系統會保持PWM波形的電壓 / 基頻比率。這類驅動器被稱為標量控制驅動器。
控制電子組件產生三個相位差為120°的低頻正弦波,用于調節每對開關的脈沖寬度。
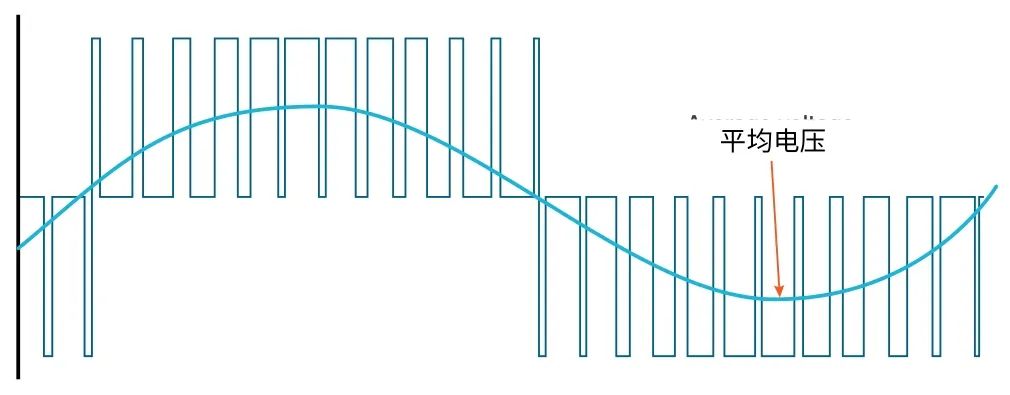
圖4. A相和B相之間的脈沖寬度調制波形的平均線電壓是正弦波
電機繞組的平均電壓近似正弦波。電機繞組的另外兩相具有相似的平均電壓,相差120°。
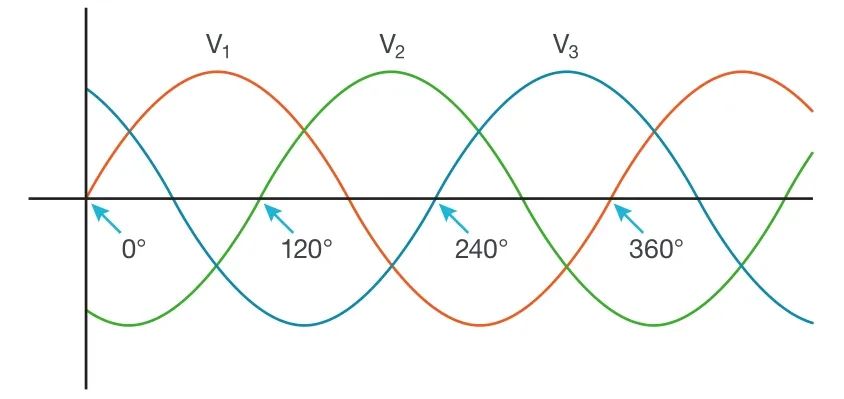
圖5. 隨時間變化的三相電壓信號
從逆變器輸出電壓的角度來看,電機在很大程度上類似于一個電感器。由于電感器對較高頻率具有較高阻抗,因此電機所吸收的大部分電流來自于PWM波形輸出中的較低頻率分量。因此,電機所吸收的電流形狀近似正弦波。
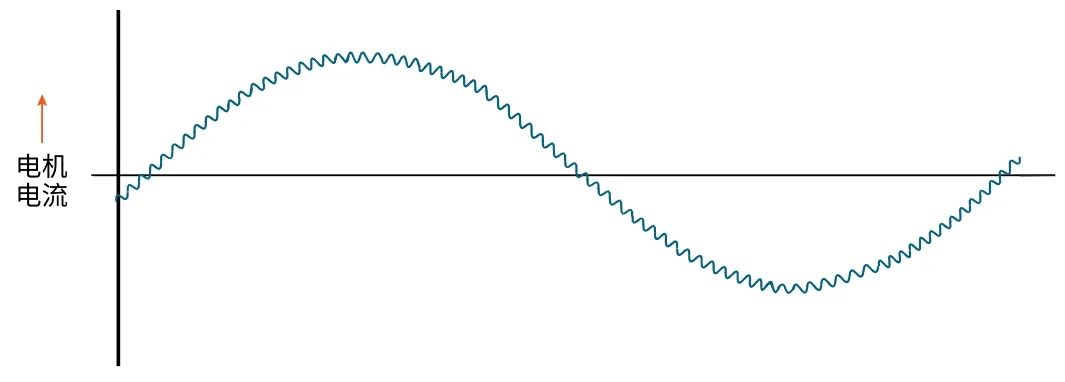
圖 6. 由于電機是感性負載,且能阻抗快速電流變化,因此電機所吸收的電流近似正弦波
通過控制調制波形的幅度和頻率,以及控制電壓和頻率比,PWM驅動器可以提供三相電源,以驅動電機達到所要求的速度。
矢量控制驅動器 / 磁場定向控制
交流感應電機和同步電機的驅動器更先進,采用矢量驅動技術。此類驅動器比標量控制驅動器更靈活、更高效,但也更復雜。
矢量控制驅動器與標量控制驅動器的相似之處在于它們都使用正弦電流驅動電機,但是矢量控制驅動器的運行更平穩,加速更快,扭矩控制也更好。此類控制系統通常使用磁場定向控制 (FOC),并且比標量控制驅動器復雜得多。
矢量D和矢量Q是正交矢量,其大小與電機的扭矩和磁通量有關。
圖7. 矢量控制 / 磁場定向控制使用復雜的PWM波形
控制系統必須測量轉子的位置以使系統同步。這通常通過使用霍爾傳感器或正交編碼器接口 (QEI) 等傳感器來實現(還會使用無傳感器系統,其中控制系統使用電機的反電動勢來確定轉子位置)。控制器使用Clarke變換和Park變換來計算矢量D和矢量Q的幅值,然后使用這些值作為控制回路的設定點。
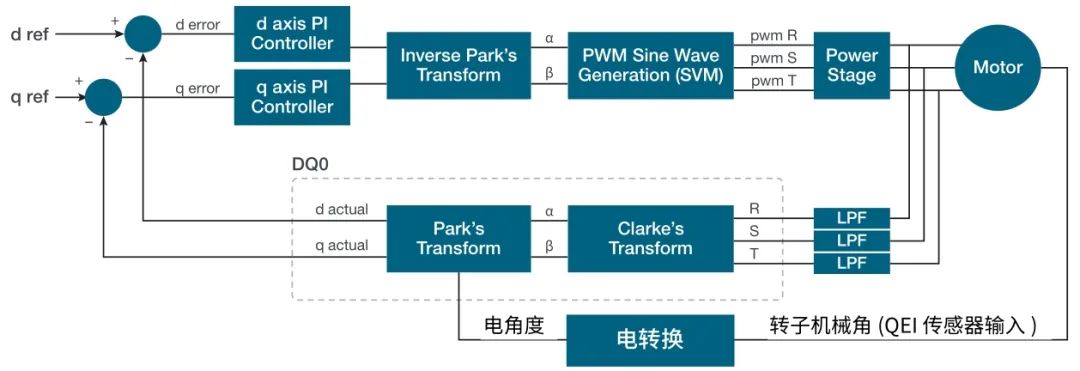
圖8. 矢量控制系統框圖
變頻驅動器系統的連接
示波器探頭的選擇
對變頻驅動系統進行功率測量需要使用電壓和電流探頭。選擇示波器電壓探頭進行電機驅動器測量時,一定要考慮以下幾點:
?電機驅動器測量涉及相對較高的電壓。例如,480V 三相電機驅動器中的直流母線電壓通常約為680V。切記確認探頭尖端的額定電壓以及用于連接探頭的配件的額定電壓。
?共模電壓也可能相對較高。也就是說,測量結果通常相對于地面是“浮動”的,因此不能使用接地參考的探頭。務必確保信號浮動不超過探頭的共模電壓額定值。
?大多數相關頻率低于200MHz,因此具有此帶寬的探頭足以滿足大多數日常測量需求。
?探頭應能用于廣泛的測量任務。
出于這些原因,通常建議使用高壓差分探頭作為功率電子逆變器子系統、驅動器輸入/輸出和控制系統測量的通用電壓探頭。


圖9. 泰克差分探頭(例如THDP0200)和泰克AC/DC電流探頭(例如TCP0030A)為許多變頻驅動器測量場景提供了良好的覆蓋范圍。
注:接地參考無源探頭不應用于測量相電壓。中性端子可能不在接地電位,從而導致大量電流流過探頭和示波器接地。這很危險,可能會導致被測設備或示波器受到沖擊或損壞。
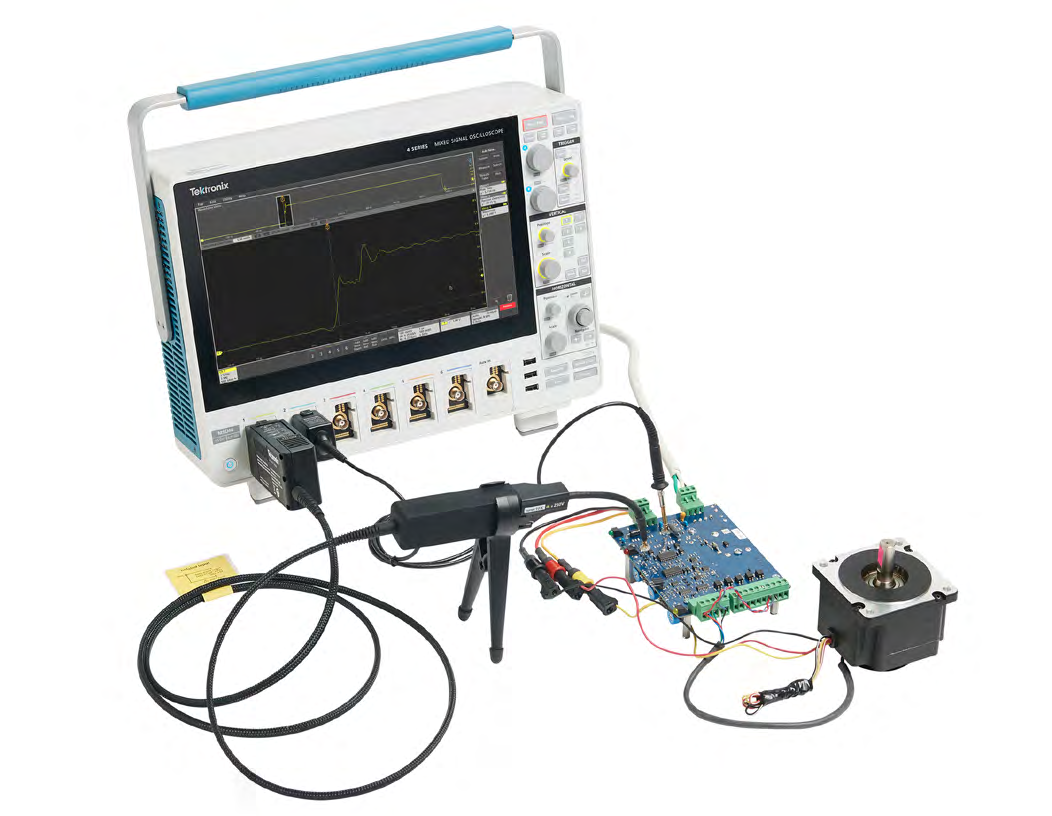
圖10. IsoVu光學隔離電壓探頭提供極高的共模抑制比,能夠承受最大2500V的差分電壓,并且具有高達1GHz的帶寬。
以下為一些建議用于電機驅動應用的探頭:
| 型號 | 描述 |
|
高壓 ( 差分 ) 探頭 THDP0100 / 0200 |
THDP系列探頭是一種良好的通用選擇,適用于對各種功率電子逆變器和電機驅動子系統進行非接地參考的浮動測量。該系列探頭能夠測量高于地面數百伏的電壓和高達6000V的差分電壓,具體因型號而異。有100MHz和200Mhz兩種型號可供選擇。 |
|
光學隔離電壓探頭 IsoVuTIVP系列 |
IsoVu探頭具有極高的共模抑制比,特別適用于在開關電路中精確測量高側柵源電壓 (VGS),并且常用于驗證碳化硅 (SiC) 和氮化鎵 (GaN) 應用。 有各種探頭尖端可供選擇。MMCX探頭尖端能夠提供高信號完整性,適用于電壓不超過250V的測量。方針尖端有兩種規格:0.100英寸 (2.54mm) 間距,適用于電壓不超過600V的應用;以及0.200英寸 (5.08mm) 間距,適用于電壓不超過2500V的應用。 |
|
電流探頭 TCP0030A和TCP0150A |
AC/DC電流測量探頭。TCP0030A具有大于120MHz的禁帶寬度,并提供5ARMS和30 AARMS兩種可選測量范圍。對于更高的電流應用,則可使用TCP0150A,可測量最大150 AARMS的電流。 |
示波器探頭設置
在進行任何功率測量之前,必須完成一些重要步驟。電流探頭必須消磁,并且所有探頭都應校正,以獲得準確的測量結果。
在進行測量之前對電流探頭執行消磁程序,消除探頭磁芯中的任何剩磁,這一步非常重要。剩磁會導致測量誤差。消磁程序通常是通過移除電流探頭鉗口的所有導體,然后按下消磁按鈕啟動的。泰克電流探頭(例如TCP0030A)會在您使用前自動提示您執行消磁程序。
校正過程可以校正任意兩個不同示波器通道(包括探頭和探頭電纜)之間的各種傳輸延遲。這一步很重要,因為相位關系對于變頻驅動器系統上的許多測量至關重要。基本步驟是向通道提供同步信號,并調整每個通道的延遲,使各通道的信號對齊。泰克公司提供功率測量校正夾具 (P/N 067-1686-xx) 來幫助解決此問題。
連接電流探頭時,務必注意探頭上的箭頭標記。如果電流探頭連接在負載的線路側,箭頭應指向負載。如果電流探頭連接在負載的返回側,則箭頭應指向遠離負載的方向。
接線配置
變頻驅動器的輸入和輸出通常都使用三相電。然而,商業、住宅和汽車驅動系統中使用的某些變頻驅動器可能由單相交流或直流供電。此外,三相系統可以采用兩種接線和建模方式:星形(或稱Y形)和三角形。接線配置決定了功率分析中使用的計算方法,因此了解并選擇正確的接線配置對于獲得預期結果非常重要。接線配置適用于電機驅動器的輸入和輸出。圖11顯示了部分泰克示波器上IMDA解決方案支持的接線配置。
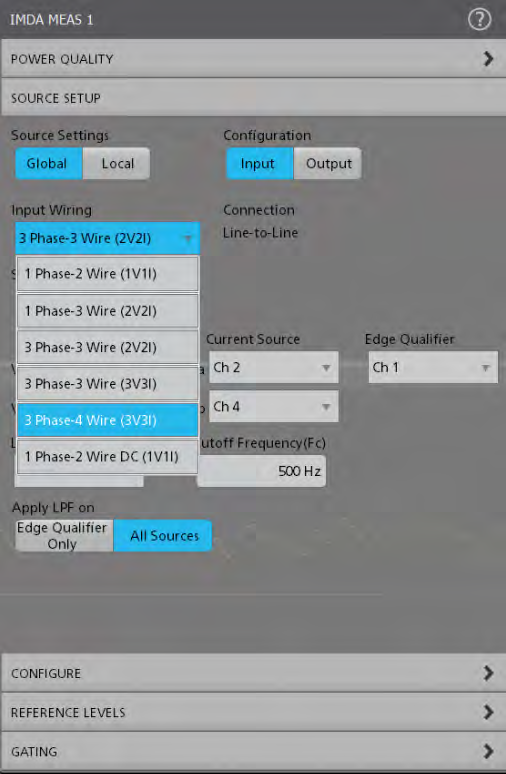
圖11. 在IMDA軟件的下拉列表中選擇輸入接線
單相連接
單相兩線 (1V1I)
需要兩個通道:分別用于測量電壓和電流,圖12顯示了電壓的測量方式。測得的總功率 P = V*I。單相交流和直流電源使用相同的設置。
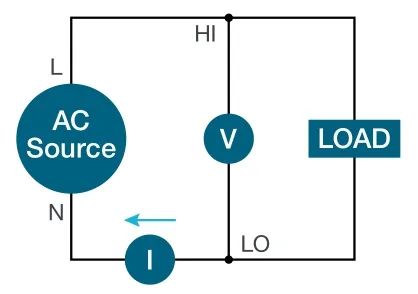
圖12. 單相雙線交流電測量。直流電源使用相同的設置
單相三線 (2V2I)
單相三線配置在電機驅動器應用中非常少見,但在北美住宅應用中很常見,通常提供一個240V和兩個120V的供電線路,每個線路可能承載不同的負載。測量此類電源需要兩個電壓通道和兩個電流通道。測得的總功率為V*I(負載 1+ 負載 2)。
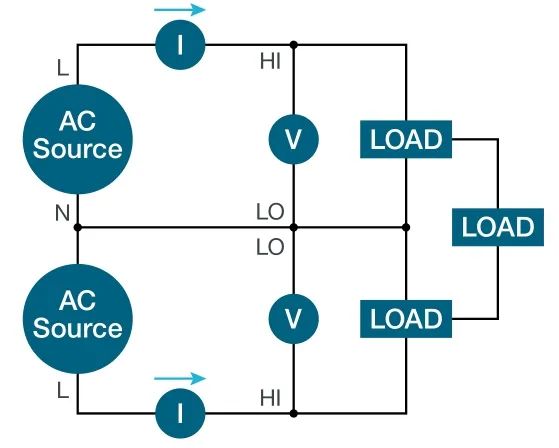
圖 13. 單相三線接線在工業環境中很少見,但在消費和輕型商業中卻很常見。
三相連接
使用兩個電壓通道和兩個電流通道 (2V2I) 測量三相三線系統
電機驅動器通常使用三線輸出,僅使用示波器上的兩個電壓通道和兩個電流通道即可準確測量(電機驅動器輸入更可能使用四線系統)。當三根線將電源連接到負載時,至少需要兩個功率表來測量總功率。需要兩個電壓通道和兩個電流通道,如圖14所示。電壓通道逐相連接,其中一相作為參考。負載和電源可以采用三角形或星形接線方式,但兩者之間不能有中性導體。在這種情況下,兩個功率表可以計算輸送到負載的總功率。(參見側欄:“如何使用四個示波器通道測量三相系統?”)
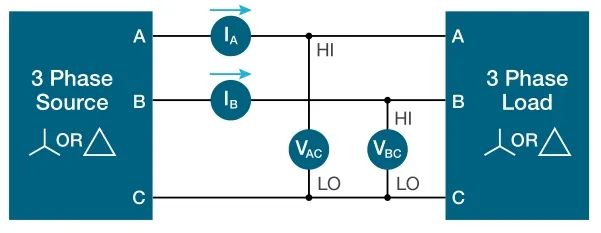
圖14. 三相三線兩功率表法
圖14顯示了接線,圖16顯示了用于測量2V2I連接的IMDA 電源設置。控制所選線路即可確定用作電壓參考的相位。在此示例中,在A相和B相上測量電流,并在A相和B相上測量相對于C相的電壓。即測量值分別為VAC、VBC、IA和IB。在此示例中,總有功功率 (ΣTrPwr)的計算公式為:
瞬時功率 P1 = VAC * IA
瞬時功率 P2 = VBC * IB
ΣTrPwr = P1 + P2。
如何使用四個示波器通道測量三相系統?
布隆德爾 (Blondel) 定理指出,對于一個N線系統,如果電壓是相對于其中一條導線測量的,那么總功率可以通過使用N-1個功率表來測量。
例如,在三線系統中,無論采用星形還是三角形接線方式,系統總功率都可以使用兩個電壓通道和兩個電流通道來確定。例如,圖15顯示了一個星形接線系統。根據基爾霍夫電流定律,如果已知其中兩個電流,就可以確定系統中的所有電流。通過測量兩相相對于第三相的相對電壓,就可以確定系統中的所有電壓。
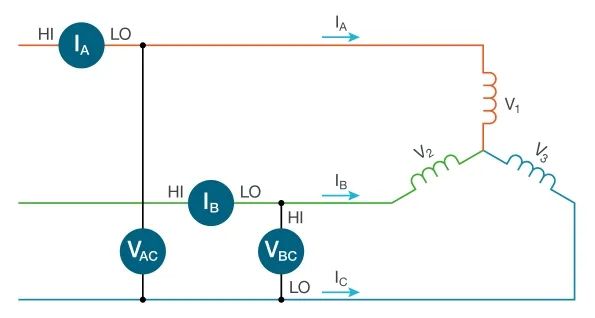
圖15. 該三線星形接線系統(無中性線)用于說明如何使用雙功率表法測量三相系統
每個功率表測量的瞬時功率是瞬時電壓和電流樣本的
乘積。
功率表1由iA和vAC組成,其中
p1 = iA (vAC) = iA(v1 - v3)
功率表2由iB和vBC組成,其中
p2 = iB (vBC) = iB (v2 – v3)
p1 + p2 = iA(v1 – v3) + iB (v2 – v3) = iAv1 – iAv3 + iBv2 – iBv3
p1 + p2 = iAv1 + iBv2 – (iA + iB) v3(公式1)
根據基爾霍夫電流定律,
iA+ iB+ iC= 0,因此iA+ iB= –iC(公式2)
用–iC代替公式1中的 (iA + iB):
p1 + p2 = iAv1 + iBv2 + iCv3,即三相的總瞬時功率。
因此,三線系統的總功率可以使用兩個電壓通道和兩個電流通道組成兩個功率表來確定。
參考文獻:André Blondel;《 多相電流能量測量(Measurement of the Energy of Polyphase Currents)》;《國際電氣大會論文集 (Proceedings of the International Electrical Congress)》;1893年8月;美國電氣工程師學會
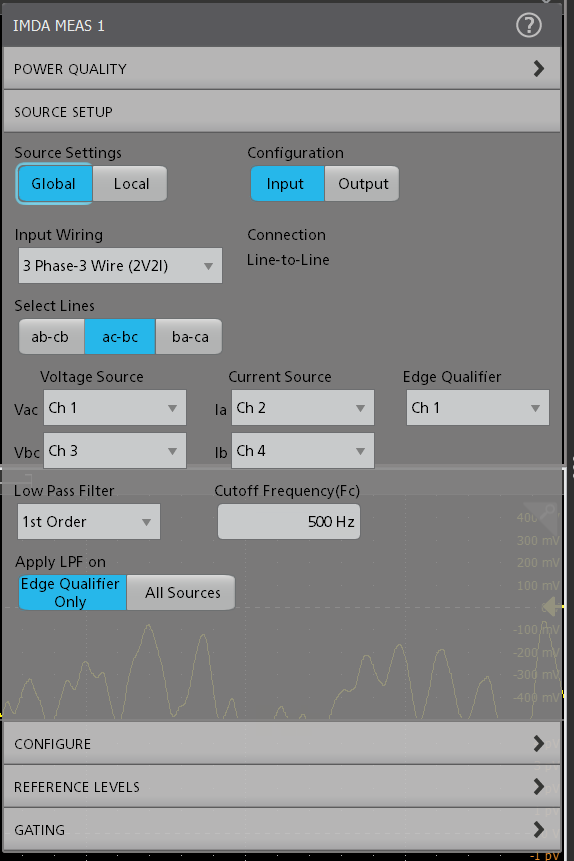
圖16. 使用雙功率表法的三線系統設置。在A相和B相上測量電流,并在A相和B相上測量相對于C相的電壓。
使用三個電壓通道和三個電流通道 (3V3I) 測量三相三線系統
盡管在三線系統中只需要兩個功率表就可以測量總功率,但使用三個功率表具有一些優勢。三功率表配置需要六個示波器通道:三個電壓通道和三個電流通道。
此3V3I配置提供單獨的相電壓和各相的功率,這是雙功率表配置所不能做到的。
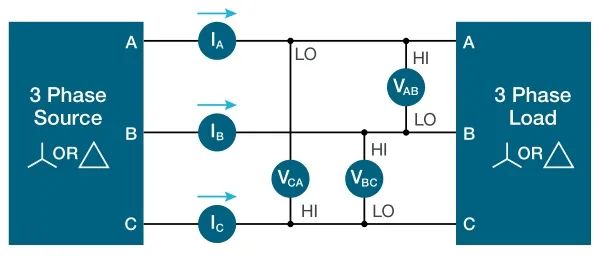
圖17. 三相三線系統,采用三個電壓通道和三個電流通道(三個功率表)測量。
對于使用3V3I配置測量的三線系統,IMDA軟件提供將線電壓 (LL) 轉換為相電壓 (LN) 的設置選項。盡管三線系統中沒有物理中性線,但可以根據瞬時線電壓確定瞬時相電壓。

這種逐點的LL-LN轉換將把所有電壓表示為相對于單一參考點,并糾正了每個相中電壓與電流之間的相位關系。您可以通過打開和關閉轉換來觀察相量圖上的相位關系,從而了解LL-LN轉換的相位校正。打開LL-LN轉換,則可以通過將相電壓和相電流相乘來計算瞬時功率。例如,我們可以計算出提供給負載的總有功功率 (ΣTrPwr)。
ΣTrPwr = (vAN * iA) + (vBN * iB) + (vCN * iC)
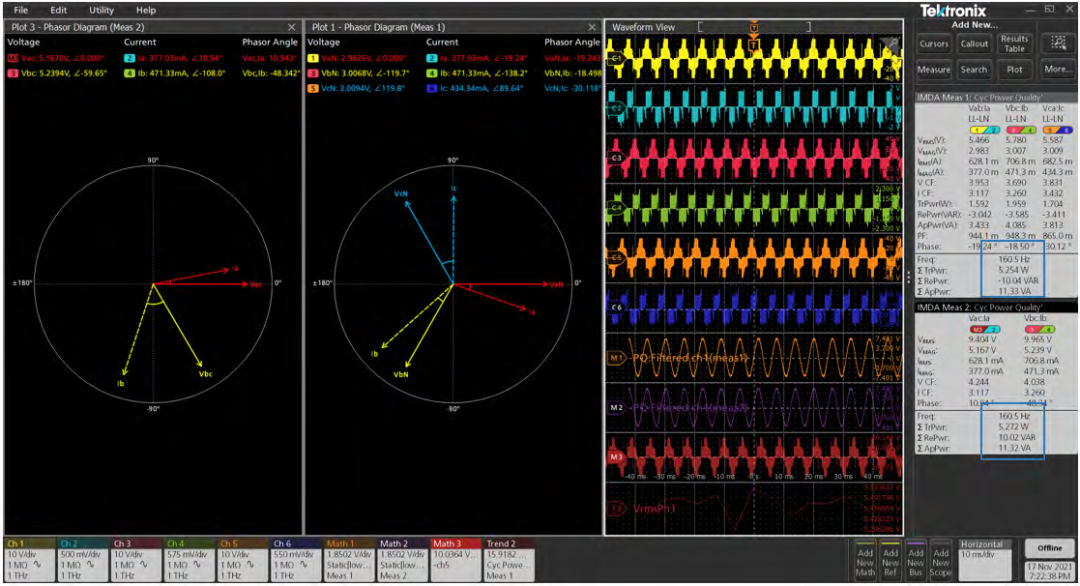
圖18. 在打開LL-LN轉換的3V3I配置中,可以讀出各相的有功功率、無功功率和視在功率以及所有相的總功率。請注意,總功率測量值與使用“雙功率表” (2V2I) 配置測得的功率測量值相當。
使用三個電壓通道和三個電流通道 (3V3I) 測量三相四線系統
如果系統中的線路與驅動器之間或驅動器與電機之間使用中性導體,則需要三個電壓通道和三個電流通道來測量總功率。圖19顯示了一個此類四線系統。所有電壓都是相對于中性線測量的。線電壓可以使用矢量數學根據相電壓幅度和相位精確計算得出。總功率 ΣTrPwr =P1 + P2 + P3。
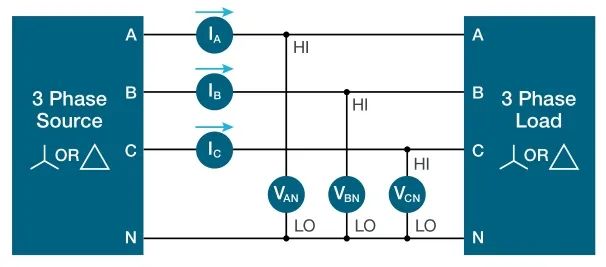
圖19. 三相四線 ( 三功率表法 )
變頻驅動器系統模塊的測量
變頻驅動器系統的不同功能模塊采用不同的測量和技術。我們將介紹各模塊(輸入、直流母線、輸出和電機)的關鍵測量值,并說明其在5系列和6系列MSO中IMDA分析工具中的位置。
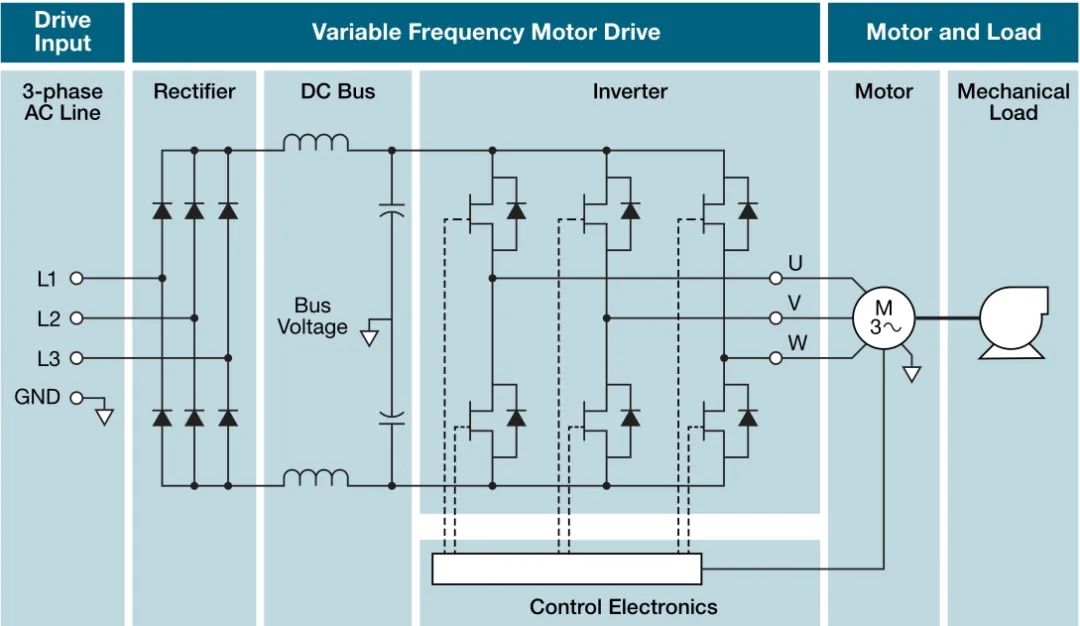
圖20. 驅動器輸入、直流母線、輸出和電機采用不同的測量方法
三相自動設置
IMDA軟件包括三相自動設置功能,可根據所選的接線配置自動配置電壓和電流源。該功能可為示波器設置最佳垂直、水平、采集和觸發參數,并且可用于所有有功功率測量。這極大地簡化了測量設置,在測量變頻驅動器輸出上的PWM波形時尤為方便。
-
驅動器
+關注
關注
54文章
8698瀏覽量
150063 -
示波器
+關注
關注
113文章
6709瀏覽量
189366 -
泰克
+關注
關注
9文章
527瀏覽量
95419 -
控制電機
+關注
關注
0文章
245瀏覽量
18694
原文標題:使用示波器對三相電機驅動器進行測量
文章出處:【微信號:泰克科技,微信公眾號:泰克科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
泰克新MSO/DPO5000及MSO/DPO4000B系列示
泰克示波器MSO4054B深圳東莞回收
泰克MSO4054B回收二手示波器MSO4054B
泰克最新推出DPO/DSA/MSO70000系列示波器使噪聲
泰克MSO5系列示波器進行基本信號獲取和探頭補償的操作
泰克MSO2014B|MSO2024B|MSO2022B混合信號示波器使用教程
泰克MSO5204B混合信號示波器

泰克 MSO2012B 示波器直流偏置調整

泰克示波器MSO58B光標橫豎切換操作指南與實用技巧






 工商網監
工商網監
評論