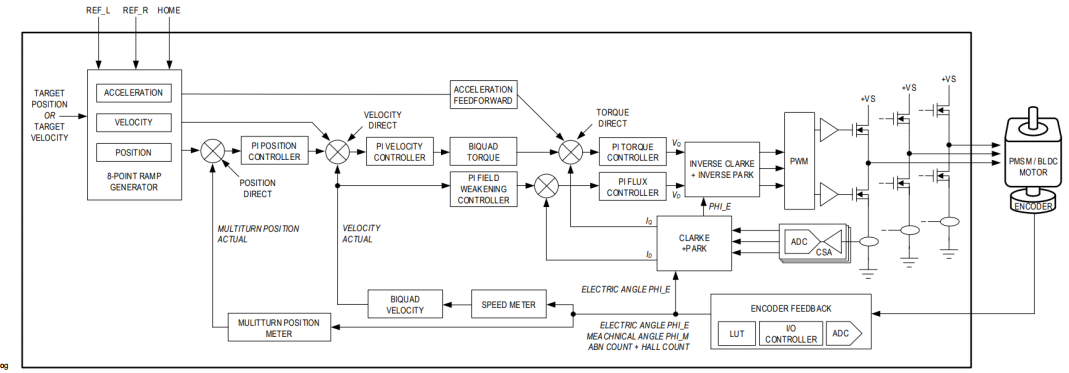
 AI機器人運動控制方案
AI機器人運動控制方案


審核編輯 黃宇
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
29567瀏覽量
211939 -
IC
+關注
關注
36文章
6105瀏覽量
178653
發布評論請先 登錄
相關推薦
熱點推薦
ADI如何重塑人形機器人運動核心
。本文將聚焦于其核心的高精度驅動與實時控制技術,展示ADI如何提供從指尖到關節的全棧解決方案,賦能機器人實現更卓越的運動性能。
詳細介紹機場智能指路機器人的工作原理
控制 :為了確保機器人在行走過程中的平衡和穩定性,運動系統還配備了多種傳感器,如加速度計、陀螺儀等。這些傳感器實時監測機器人的運動狀態和姿態
發表于 05-10 18:26
人形機器人火爆背后,先楫半導體解構運動控制芯片進化密碼
。近年來,全球人形機器人產業規模持續擴大,預計未來十年將繼續保持高速增長的趨勢。 作為國產高性能RISC-V內核MCU芯片設計企業,先楫半導體的產品涵蓋微控制器芯片及其解決方案,已貫通從感知、通訊到
發表于 05-07 16:40
?3383次閱讀

【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
ROS的全稱:Robot Operating System 機器人操作系統
ROS的 目的 :ROS支持通用庫,是通信總線,協調多個傳感器
為了解決機器人里各廠商模塊不通用的問題,讓機器人快速開發
發表于 04-30 01:05
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
、Gazebo仿真(含RGBD相機/激光雷達仿真)、實物機器人運動控制,實現\"仿真→實物\"的無縫銜接
高階應用篇(7-9章)
聚焦視覺SLAM、自主導航等前沿場景,提供完整項目鏈路(如
發表于 04-27 11:24
基于先進MCU的機器人運動控制系統設計:理論、實踐與前沿技術
摘要 :隨著機器人技術的飛速發展,對運動控制系統的性能要求日益嚴苛。本文聚焦于基于先進MCU(微控制單元)的機器人
大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產品
識別聯調。
進迭時空致力于為智能機器人提供完整全棧優化的RISC-V AI軟硬件解決方案,第一代RISC-V AI CPU芯片K1已完成AI
發表于 04-25 17:59
啟明智顯AI服務機器人解決方案:智能硬件方案的佼佼者
啟明智顯AI服務機器人解決方案,以多模態感知+全棧AI能力,打造真正“會思考、能辦事”的服務伙伴,讓機器人在家用與商用場景中真正“活”起來!

四足機器人的結構、控制及運動控制
? 四足機器人憑借其獨特的地面接觸方式和對復雜地形的出色適應能力,已成為自動化與機器人工程技術研究的焦點。近年來,在結構設計、運動規劃和平衡控制等關鍵方面,四足

《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊
將大模型的\"大腦\"裝入物理實體的\"身軀\",讓AI真正走進現實世界。這種革新不僅體現在稚暉君開源的人形機器人方案,更在“AI教母”李飛飛的VoxPoser
發表于 12-19 22:26
人形機器人控制器之MCU、DSP、AI芯片
電子發燒友網報道(文/李彎彎)人形機器人控制器是人形機器人中的核心神經系統,負責對機器人的運動進行細致規劃和
Al大模型機器人
金航標kinghelm薩科微slkor總經理宋仕強介紹說,薩科微Al大模型機器人有哪些的優勢?薩科微AI大模型機器人由清華大學畢業的天才少年N博士和王博士團隊開發,與同行相比具有許多優勢:語言
發表于 07-05 08:52





 工商網監
工商網監
評論