 無人值守地面傳感器成為探測時敏目標的重要手段
無人值守地面傳感器成為探測時敏目標的重要手段
作為一個網絡節點,潛艇可以接收、處理及共享關鍵任務分布式傳感器數據。除此,潛艇可作為潛艇戰術無人機(SubmarineTactical Unmanned aerial Vehicles, STUAVs)的部署平臺。STUAVs能傳輸關鍵數據并部署船外傳感器系統。作為無人值守地面傳感器(Unattended GroundSensors, UGS)的“系統管理員”,潛艇將其支持范圍拓展到了特種作戰部隊(Special Operating Forces,SOF)及拒絕訪問區域的隱秘情報、監視與偵察(ISR)。潛艇長期隱秘在站,可通過無人值守地面傳感器系統(針對關注目標進行探測、監測與通信)在陸地上對敵方活動進行非挑釁性觀測。本文旨在探討最大化無人值守地面傳感器性能且最小化其體積所需的能力。潛艇戰術無人機部署的無人值守地面傳感器系統必須進行封裝,以保證無人值守地面傳感器系統是潛艇戰術無人機的可用負載,而且會部署為網格的一部分,嵌入到地面中,保障任務周期并進行偽裝以實現低探測率(Low Probabilityof Detection, LPD)與低攔截概率(Low Probability of Interception, LPI)。一經部署,無人值守地面傳感器的探測、監視與傳遞信息能力會為情報、監視、偵察與目標定位(intelligence,surveillance, reconnaissance and targeting, ISRT)提供一種新的方式。
圖1 潛艇時敏目標探測與監測
本文描述了一種用于時敏目標(Time Critical Targets, TCT)探測的網絡中心系統級概念。時敏目標包括“飛毛腿”導彈發射器、坦克、裝甲輸送車(APC)及軍隊。目標是探測、識別、監測及向指控中心實時傳送信息。潛艇戰術無人機傳感器系統與船下無人值守地面傳感器成為探測時敏目標的重要手段,且能提供打擊(對抗)時敏目標后的戰場損害評估(BDA)。
探測時敏目標依賴于傳感器的位置,信息到指揮控制通信與計算機情報(Command ControlCommunication and Computer Intelligent C4I)站的傳輸以及數據分析。我們提出了一個以網絡為中心的概念,其中傳輸與接收站被視為作戰網中的一個節點。這一分布式方法的優勢即信息會自動按路線發送到相關節點且如有節點發生故障時系統操作不中斷。時敏目標可使用裝有聲敏、地震及磁性傳感器的無人值守地面傳感器進行探測。這些測量與信號情報(Measurement andSignal Intelligence, MASINT)傳感器系統可以從潛艇戰術無人機進行部署。潛艇作為“系統管理員”,可部署帶測量與信號情報系統負載的無人機并在ISRT期間接收、處理并共享關鍵任務分布式傳感器數據。
如下列出了圖1-1中所示的本概念時敏目標探測與監測涉及的所有組件:
潛艇:無人機部署、網絡節點接收、處理與共享傳感器分布式傳感器數據。
STUAV:傳感器部署、傳感器與潛艇間信息傳輸。
UGS:將傳感器特征分類為TCT,持續監測TCT并采用中介平臺(如STUAV)通過長途通信或炮目線(Lineof site, LOS)將數據傳給潛艇。
無人機載激光技術:對敵方活動進行探測與數據通信。
目前的技術已經用于設計與研發可以測量、處理及與TCT進行聲敏、地震及磁性數據通信的UGS。無人值守地面傳感器可以融合低功耗電路、實時信號處理單元、長壽命電源以及耐用封裝。使用商業成品技術,空中投放的傳感器系統可以在全部作戰周期內對目標進行探測、監測與數據傳輸。
在智能戰場準備(IPB)階段,STUAV上的傳感系統可協助探測潛在威脅區域以保障連續的情報監視與偵查。激光技術與其他ISR設備識別出潛在區域后供STUAV部署UGS。
本文在隨后節中詳細討論了TCT探測與監測。第二節討論了STUAV作為如MASINT UGS這樣傳感器系統的部署平臺。第三節描述了MASINT UGS用于探測與監測TCT。第四節描述了該數據從傳感器到指揮控制節點的雙向鏈路通信。第五節給出了結論與未來工作的建議。
潛艇戰術無人機
現在,能夠獲得海岸區域信息的傳感器平臺不是都能夠適用于潛艇,即使適用也不是直接由潛艇控制。“有機無人機”能大大擴展潛艇的行駛范圍與其監視能力。潛艇的隱蔽性允許在近海區域發射小型無人機,執行一些ISRT操作(能夠深入敵方領地)獲取并保持空中優勢的風險。這些操作包括以負載的形式采用激光技術對地面進行掃描和/或部署MASINT UGS。現在已可以采用改進的或新技術來提升無人機系統的航時、航程、生存力、容量以及任務保障能力,且仍將成本保持在可接受范圍內。
潛艇部署無人機的一個最大問題就是要進行水下無人機發射。當今的攻擊型潛艇利用多種發射器系統部署大量不同類型的負載,范圍覆蓋環境傳感設備到例如魚雷和巡航導彈的大型武器。發射器系統尺寸從3英寸對抗管到25英寸直徑的垂直發射系統(Vertical LaunchSystem, VLS)不等。部署大量UGS所必需的負載能力很可能會使無人機的尺寸對于現有發射系統過大(魚雷管和VLS例外)。其他可能的發射器包括用于將要部署在弗吉尼亞級潛艇上的先進風帆的垂直發射管。
盤旋電子戰殺手(Loitering Electronic Warfare Killer, LEWK)是一個未來潛艇發射無人機的例子,圖2-1顯示了這個使用可充氣螺旋槳技術的可變型大機翼飛機。LEWK先進概念技術演示(Advance ConceptTechnology Demonstration, ACTD)呈現了一個低成本的飛行“卡車”,也可稱作盤旋無人機。這個可回收無人機系統能夠攜帶約200磅負載執行任務8航時,飛行高度100-15000英尺,航速100-150節。LEWK通過采用獨特的可充氣螺旋槳技術將一個高度緊湊的彈藥狀物體轉換成了一個大機翼長航時飛機。在它的裝載配置下,LEWK高度緊湊的彈藥狀外形和通用炸彈的尺寸與重量相仿。發射后,該緊湊體變成一個無人機。通過降落傘進行回收。無人機通過標準任務航電集進行指控,GPS/慣性導航航電系統負責接收動態飛行中的再次任務分配。預編程與飛行中再次任務分配支持對傳統與低可視系統進行干擾,發送聯合效應集束彈藥至GPS坐標或機載光電/紅外傳感器指向的目標,且支持信號中繼與戰斗管理。成本與性能目標通過集成大量新近研發的商業與軍事技術來實現。這包括低成本傳感器、GPS與慣性導航航電系統、高速計算機、支持雷達干擾的負載、現有彈藥和重油活塞引擎。LEWK是一個無人駕駛、長航時、可回收,能用于所有威脅環境下的干擾平臺,它能攜帶足夠精度的負載并能與威脅指控架構協同作戰。
LEWK ACTD由美國空軍指控,參與者包括美國陸軍、美國海軍及美國海軍陸戰隊。歐洲司令部是4年期ACTD的用戶贊助商。LEWK技術管理由海軍陸戰隊系統司令部負責。歐洲司令部為作戰管理者,運輸管理由空軍航空系統中心負責。整體ACTD監管由五角大樓里的OSD官員負責。
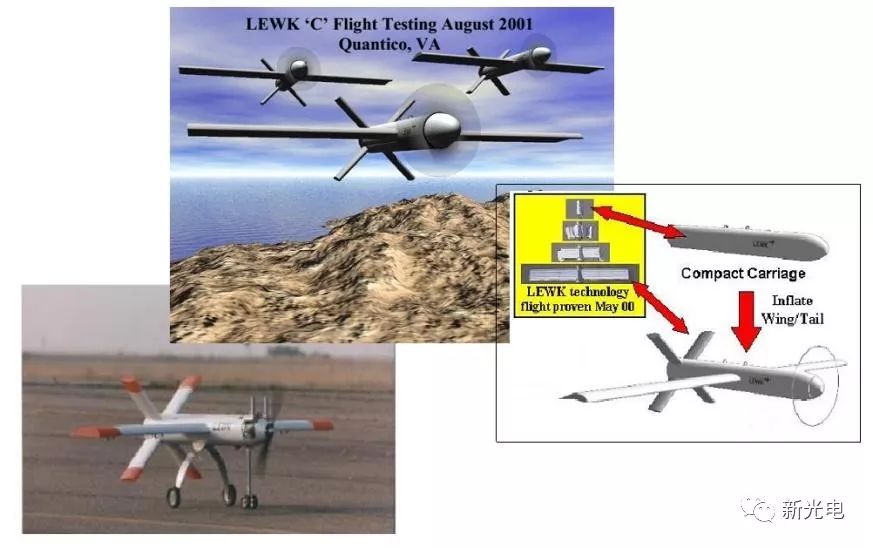
圖2 盤旋電子戰殺手(LEWK)
需要對無人機進行封裝保護,使其能夠承受流體動力與水下發射的深度壓力。當全備彈(All Up Round, AUR)(包括封裝體與無人機)從發射器系統發出并安全離開潛艇外殼體,AUR的正浮力會將其帶到水面。需要采用例如火箭發動機或氣體發生器這樣的方式將無人機發送到足夠的高度以維持飛行。
無人機和潛艇間的通信由射頻鏈路完成。這個鏈路可針對無人機任務計劃做出改變,并且能夠接收無人機工作狀態、任務狀態及傳感器數據信息。無人機內部的高度自主性可省去與潛艇間的持續通信。這可以削減潛艇的易損性,因為不需要在整個任務期間一直有通信桅桿。也可以采用光聲方法,其中無人機將一束激光束打向水面以產生水內聲音通信信號,用于水下潛艇探測。由于采用了窄激光束,這一方法在空中是隱蔽的,它很難被攔截且允許潛艇在通信接收階段高速深水行進。相似地,無人機可以接收來自潛艇無人水下航行器(UnmannedUnderwater Vehicle, UUV)的高頻率聲通信,通過在潛艇附近探測水面獲得飛行指令或激活信號以維持水下隱蔽。
激光技術不僅可以生成并探測水面振動,還可以穿透并分析固體表面,例如地面,探測掩埋設施、礦或軍隊移動。低功耗探測激光束可探測人體和周邊結構的聲音振動,以此對軍隊進行被動的秘密監測。探測技術可用作智能引信,用于監控特定目標的振動瞬變或光譜;或用于對物體內外部掃描以定位其空間時間的振動信號。應用于沿海區域的激光技術支持港口防御與探測自由移向潛在威脅區域的部隊。
當無人機完成自身任務后,它的任務計劃會指引它飛到一個恰當的地方,潛入海洋或降在遠處陸地或近水飛行到艦隊航空母艦。
采用MASINT UGS進行探測與監測
由于平臺間需要以網絡為中心的傳感器通信,因此演示了極速電子感測網(Expeditionary Sensor Grid,ESG)和端對端至傳感器網關節點的連接。ESG可將小型、遠程及廉價的ISR設備以這樣的方式接入網絡中,使所有服務可以共享作戰空間內的分布式傳感器數據。這樣的ISR TCT探測與監測設備包括UGS(如圖3-1所示)及其他STUAV傳感器負載,例如激光系統。
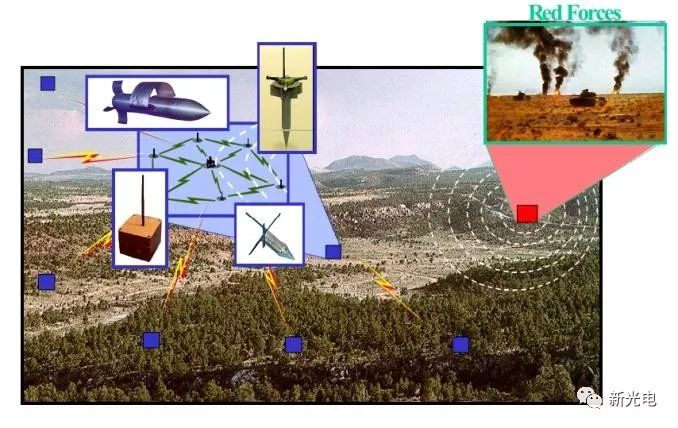
圖3-1 ESG內的UGS
目前的技術能夠通過采用傳感器系統實時識別TCT,這樣的傳感器系統包括聲敏、地震及磁性傳感器、低功耗數字信號處理器、低剖面天線通信鏈路和隱秘衛星鏈路。空中部署的MASINT系統可以根據目標引擎類型與氣缸數、GPS定位及運行方向識別平臺,通過確定車輛質量和目標距離識別運載體,該系統還可以識別軍隊。目標的聲敏、震動及磁性特征可以存儲為“特性向量”,供數據信號處理(DSP)單元進行精確探測。由于采用內部傳感器處理,只有一小部分數據需要傳輸,如目標識別與位置。
車輛發動機的聲音與振動光譜與在地面上的運動為MASINT傳感器系統提供了特征,使其能在特定的距離識別車輛類型。即使是在地面有大風的情況下也可以進行TCT精確探測。通過對預放大器(控制麥克風)應用一個低噪聲電源,噪聲源對收集的采樣數據的影響就可以減小。下一代電路板采取的降低工作電壓的方式也可以減小系統前端的噪聲。雖然聲音信號會受到天氣與地形的影響,但傳感系統可以在強暴風雨條件下探測高價值地面車輛。
在空中部署指揮控制與通信處理器后就可以執行初始子系統檢測,并將傳感器狀態報告給基站。傳感器位置、內部時鐘設置和北向參考可以存儲于內存并當潛在目標被感測到后由DSP調用。
頂級的傳感器處理器可以將遠距離高性能聲敏與地震傳感器的數據進行相關,并將數據轉變為特征特性向量與車輛識別庫進行比較。傳感器系統可以確定車輛的狀態是未知、忽視還是識別。傳感器系統通過對未知目標分類,從而實現指揮與控制分析并識別潛在新目標。新目標向量特性又可由傳感器接收再加到車輛特性向量庫里。對上文描述的特性向量架構進行的改進包括對帶機械問題的TCT聲音表現的改進,它能允許車輛運行,但會改變聲音信號。
采用防水外殼、低功耗信號處理電子器件和系統控制電路板,無人值守UGS外場壽命可達12月之久。加裝防水外殼并連接好的傳感器可在–40℃到85℃下工作。關于節約電池電量,在低功耗指揮控制及通信微處理器(控制所有子系統)發出觸發事件之前,傳感器系統會一直保持惰性。指揮控制及通信處理器通過關閉提供初始內存存儲數據的控制系統節省電量,這些控制系統包括GPS接收器和用于獲取傳感器位置與方向的磁性電路。未來還可能通過飛機初始分類來避免當任務為探測地面車輛目標時,識別飛機而耗費電能。
由于采用內部傳感器處理,僅傳輸了少部分目標數據用于網絡中心戰。低攔截率(LPI)與LPD通信鏈路可能會耦合一個低剖面天線以將用于隱秘作戰的探測減至最少。嵌入式抗干擾與反欺騙設備也能夠使用關閉模式減少無關信號與目標電源故障。
戰場圖像實時顯示能使潛艇具有執行系統管理的能力。基于PC的映射與地形軟件包(如圖3-2所示)可以集成于潛艇內部或網絡中心平臺,提供傳感器信息(車輛識別、位置、到達時間與相對方位)的地理顯示。這種UGS數據實時顯示不僅能用于測試系統,還可添加到通用態勢圖以支持戰斗群和聯合作戰。
圖3-2 士兵戰術決策輔助
通 信
潛艇保持隱身及長期停靠(位置相對固定)的能力有力地支撐了其指揮節點的作用,無論是在隱秘長期ISR作戰,還是在短期任務例如IPB和預攻擊/跨越攻擊中。作為指揮控制作戰平臺,潛艇具有以下特色:
能在收集與報告戰斗群設備信息時保持潛望深度。
提供一個非挑釁性環境,使其中的ISR和IPB操作可以進入到一個高級階段。
在采用低可見性桅桿與天線保持隱身時允許有效雙向通信。
將傳感器數據傳輸到防區外作戰中心或指揮控制節點是該系統級概念的一個重要組成部分。由于遠程部署的傳感器區域通常無法訪問且這些傳感器的功率與天線增益有限,因此需要一些鏈路與中繼。通信數據鏈路包括:
UGS到無人機/衛星
無人機/衛星到潛艇/防區外作戰中心(SOOC)
無人機載光電聲傳輸到潛艇
潛艇/防區外作戰中心到其他威脅網絡節點
嵌入在UGS中的雙向通信為“系統管理者”接收狀態檢測、識別與分析MASINT數據和使用所關注的新“特性向量”更新傳感器識別庫提供了途徑。必須選擇LPD或LPI通信方法以保障傳感器使用過程中的通信可靠性。
UGS到無人機/衛星
為了與無人機/衛星進行通信,通信天線傳輸/接收模式必須有半球(最高點為原點)功能。空投的傳感器系統可以設計成與軌道通信衛星VHF、軍用二代UHF或L波段擴展頻譜衛星通信系統進行通信。低數據速率與窄帶寬與相對低功耗的UGS一致,保障了LPD/LPI。在UGS內處理中間數據降低了數據速率。窄帶寬允許到衛星的上行鏈路為低頻(VHF/UHF)。這也與UGS天線需要弱聚焦波束圖樣的需求是一致的。使用按需分配多址接入(Demand AssignmentMultiple Access, DAMA)協議,衛星下行鏈路通常會處于較高頻段,如X波段,因其擁有極大的帶寬以處理使用各種數據速率以及地面覆蓋波束,或甚至點波束的多個用戶。
衛星通信允許連續數月至一年的長期ISR操作(包含UGS)。UGS連續長期執行任務會受到電源與數據傳輸量的限制,通過自動或雙向通信控制。戰術無人機收發器傳輸的UGS數據可實現短期中間通信。這通常意味著對UGS電源限制更小。對于給定的UGS,如果無人機在任務期間“不可見”(接收器的信噪比超過閾值),有效占空比就難保證。
無人機/衛星到潛艇
目前,“高速深水下通信”項目正考慮進行轉化并集成來自工業界、DARPA與國外浮力電纜系統、拖體與繩索系統的技術。GEC馬可尼公司生產的AVXD天線,其頻率范圍覆蓋了VHF、UHF LoS、UHF DAMA SATCOM、JTIDS、IFF、GPS與手機的頻譜。目前海軍水下作戰中心對AVXD的評估會對現有SSN-688中的AN/BR-34s或OE-538天線提供一個備案。DARPA要求麻省理工林肯實驗室演示UHF先進浮力電纜天線能夠給潛艇提供收發器功能,其尺寸要能滿足OE-315 BCA天線要求。可回收系留光纖(RetrievableTethered Optical Fiber, RTOF)浮標是另一種雙向實時通信系統,它由英國開發,帶有滿足美國海軍對潛艇速度與深度要求的UHF、SHF、電子保障措施和視頻負載能力。可回收系留光纖必須滿足美國海軍其他要求以用于實戰。短期增強當前雙向衛星通信能力可使潛艇同UGS持續進行非挑釁性通信,為聯合特遣部隊提供關鍵TCT數據更新。
無人機光學雙向傳感器或通信到潛艇
空中隱秘寬頻水面振動激光探測與聲音信號激光生成可以位于無人機內部,用于探測水面或地面聲音或振動,報告TCT用于UGS部署。將這兩種獨立的技術結合起來可以獲得一個高功率紅外激光,激發聲音壓力波,還可以獲得一個激光多普勒振動計的低功率可見激光束,用于水面振動探測。
這些技術可被動測量空氣與水交界面的振動,用于探測水下聲音與生成主動光電聲傳輸,以保障空中與水下平臺通信。這些技術可以與特殊設計的光電聲浮標一起使用,浮標聯合了光與聲音的傳輸與接收,保障了無人機與高速深水行進的潛艇間的持續通信。空中隱蔽作戰通過窄激光束實現,聲吶浮標很難探測或攔截反向于明顯射頻信號的傳輸。
激光傳輸與探測免去了由特種部隊提供遙感、水下與空中平臺及無人系統間通信的需求。初始實驗室研究已經完成,演示了該概念的可行性。需要設計最佳的原型傳感器以滿足真實環境條件與測試。
結 論
本文闡述了一個TCT探測與監測的系統級概念。探測TCT的傳感器可采用潛艇發射的無人機部署。STUAV可作為數據中繼、可選部署載體及傳感器平臺。作為文中描述的數據與通信網絡焦點,潛艇可向特種作戰部隊提供關鍵保障并執行隱秘ISRT任務。潛艇的隱秘性與長期在站支持采用MASINT系統(針對關注目標進行探測、監測與通信)在地面非挑釁性觀測敵方活動。本系統的目的是要獲取信息以實現精準快速的資源部署來對抗敵方目標。
傳感器分階段部署能增加瞄準點精度。由ISR確定的初始搜索區域和來自STUAV的激光負載系統共用于備戰并協助戰場損傷評估。
該概念的整體價值在于它提供了優化戰斗中軍事設備部署所必須的MASINT數據。了解敵方武器的位置與狀態就能進行精準響應,這能減少響應所需的資源數量與響應威脅的成本,更重要的是,它能提供由隱秘防區外平臺(如潛艇)部署并控制的ISR設備來降低人員傷亡風險。
-
傳感器
+關注
關注
2564文章
52706瀏覽量
764606 -
無人機
+關注
關注
230文章
10769瀏覽量
185879
原文標題:【第104期】無人值守地面傳感器—新型潛艇情報、監視與偵察手段
文章出處:【微信號:eofrontiers,微信公眾號:新光電】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
無人值守地面傳感器系統設計
解讀420億美元無人駕駛市場下的傳感器產業
基于S12的無線傳感器網絡樣機的系統設計
反無人機技術的研發,無人機反制設備成為熱門產品
知語云:低慢小無人機如何反制管制監測行為?方式方法又是什么?
一個安全有效的數據聚集取回技術在無人值守的無線傳感器網絡中的
無人值守地面傳感器系統設計

基于無線傳感器網絡移動目標探測跟蹤






 工商網監
工商網監
評論