") CAN節(jié)點錯誤管理機制工作原理解析
CAN節(jié)點錯誤管理機制工作原理解析

CAN節(jié)點的穩(wěn)定性、可靠性和安全性得益于其強大的錯誤管理機制。那么,CAN節(jié)點為什么能感知錯誤?又是如何響應錯誤?您是否能清晰地想象出這一過程?本文將為大家詳細分析CAN節(jié)點錯誤管理的工作過程。
節(jié)點電路構成
如圖1所示,MCU作為主控制器,完成CAN控制器和功能電路的控制。
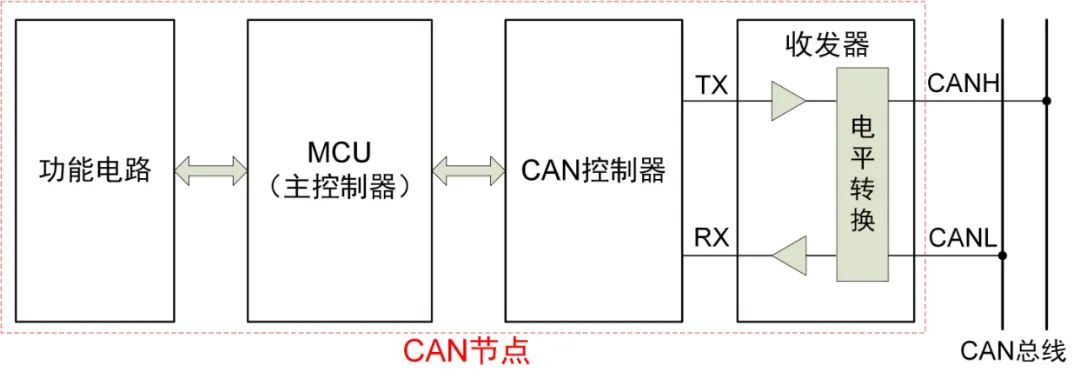
圖1 CAN節(jié)點組成框圖
CAN控制器是工作于數(shù)據(jù)鏈路層的器件,集成了CAN規(guī)范中數(shù)據(jù)鏈路層的全部功能,其功能由軟件和硬件共同實現(xiàn),從設備供應商買回來的CAN控制器已經(jīng)把相應的邏輯固化在其硅片之中;MCU是工作于應用層的器件,其功能由軟件和硬件共同實現(xiàn),MCU運行的程序可由設計者靈活設計,以實現(xiàn)CAN節(jié)點的特定功能;CAN收發(fā)器工作于物理層,其功能完全由硬件實現(xiàn),其作用是將CAN控制器的邏輯電平轉(zhuǎn)化為CAN總線的模擬差分信號,以及把總線模擬差分信號轉(zhuǎn)換成CAN控制器的邏輯電平。
CAN節(jié)點的錯誤管理屬于CAN通信規(guī)范數(shù)據(jù)鏈路層的內(nèi)容,具體來說,錯誤管理是通過MCU和CAN控制器來實施的。可以說,CAN控制器是錯誤管理的基礎設施,我們可以從兩個方面理解其工作邏輯:一是如何感知錯誤,二是如何響應錯誤。
注:本文所說的CAN規(guī)范指的是德國BOSCH公司的《CAN Specification Version 2.0》。
節(jié)點如何感知錯誤?
如前文所述,節(jié)點對總線錯誤的識別是通過CAN控制器來完成的。CAN控制器輸出給收發(fā)器發(fā)送引腳TX的邏輯信號位會從收發(fā)器接收引腳RX接收,這使得CAN控制器可以在發(fā)送一個邏輯位期間同時監(jiān)測總線的實際電平值。CAN控制器檢測總線錯誤原理如圖2所示:
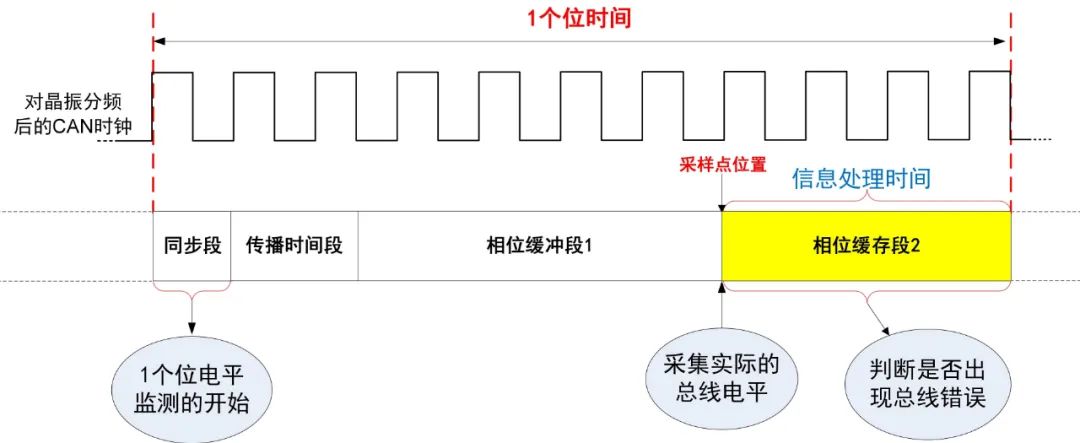
圖2 監(jiān)測總線錯誤原理圖
如圖2描述,CAN控制器監(jiān)測一個總線電平的電平值是在采樣點位置進行的,判斷是否出現(xiàn)錯誤是在信息處理時間內(nèi)完成的。
綜上所述,CAN控制器對錯誤的識別可概括為:無論是作為發(fā)送器還是接收器,在采樣點位置成功監(jiān)測到當前總線的實際電平值后,CAN控制器便按照CAN規(guī)范中描述的錯誤管理規(guī)則判斷是否出現(xiàn)錯誤。
CAN通信過程中的錯誤類型包括5種,分別是:位錯誤、填充錯誤、CRC錯誤、幀格式錯誤、應答錯誤。接下來分別對5種錯誤的檢測識別過程進行解析。
1、位錯誤
位錯誤是由作為發(fā)送器的節(jié)點在發(fā)送報文期間進行檢測識別的。CAN控制器的程序邏輯發(fā)送的電平與監(jiān)測到總線的實際信號不一致即在此位期間檢測到位錯誤。
例外情況,在仲裁場或應答間隙期間發(fā)送一“隱性”位卻監(jiān)視到一“顯性”位,以及當發(fā)送器發(fā)送一個被動錯誤標志但檢測到“顯性”位時,均也不被視為位錯誤,以實現(xiàn)特定的功能。
2、填充錯誤
在CAN幀的位場中,幀起始、仲裁場、控制場、數(shù)據(jù)場以及CRC序列,均通過位填充的方法編碼。無論何時,發(fā)送器只要檢測到這些位場對應位流里有5個連續(xù)相同值的位,便自動在接著的下一位插入一個補碼位。CAN控制器在監(jiān)測總線電平值的同時對連續(xù)相同的位電平值會進行計數(shù),如果在使用位填充法進行編碼的信息中,出現(xiàn)了第6個連續(xù)相同的位電平值時,便檢測到一個填充錯誤。
3、CRC錯誤
CRC錯誤是由作為接收器的節(jié)點進行檢測識別的。CRC序列共15位(不包含填充位),其內(nèi)容由幀起始、仲裁場、控制場、數(shù)據(jù)場(如果有)的無填充位流計算而來。
CRC序列計算使用CAN規(guī)范規(guī)定的方法,作為發(fā)送器的節(jié)點發(fā)送CAN報文時CRC序列由規(guī)定的計算方法確定。作為接收器的節(jié)點從總線上接收完數(shù)據(jù)場最后一個數(shù)據(jù)位(沒有數(shù)據(jù)場時是接收完控制場的最后一個位)后,如果接下來接收到實際的CRC序列與接收器的計算結果不一致,便檢測到CRC錯誤。
4、格式錯誤
節(jié)點無論是作為發(fā)送器的還是作為接收器均可在監(jiān)測報文期間檢測識別格式錯誤。由于CAN通信嚴格按照CAN規(guī)范定義的幀格式進行報文封裝傳輸,CAN控制器在監(jiān)測總線電平位時明確知道當前位、后續(xù)位屬于幀格式中哪個位場,以及屬于位場的第幾個位,當接收到一個屬于幀格式固定形式的位時,如果實際電平值與幀格式定義不一致,則檢測到一個格式錯誤。
例外情況,對于接收器來說,幀結束最后的位被置于“不重要”狀態(tài),監(jiān)測到的幀結束最后一位期間的顯性位不被當作幀錯誤。
5、應答錯誤
應答錯誤是由作為發(fā)送器的節(jié)點檢測識別的。在發(fā)送報文時,只要在發(fā)送應答間隙(隱性)期間所監(jiān)測到的位不為“顯性”,則發(fā)送器會檢測到一個應答錯誤。
注:1、上述5種錯誤不會相互排斥,也就是說CAN幀中的某個錯誤有可能同屬一種以上的錯誤類型。
2、如上所述,作為發(fā)送器或接收器的不同角色時,直接能檢測到的錯誤類型是不一樣的。
節(jié)點如何響應錯誤?
CAN規(guī)范中規(guī)定每個CAN控制器中實現(xiàn)一個發(fā)送錯誤計數(shù)器和一個接收錯誤計數(shù)器。根據(jù)計數(shù)值不同,節(jié)點會處于不同的節(jié)點狀態(tài),并根據(jù)計數(shù)值的變化進行狀態(tài)轉(zhuǎn)換,狀態(tài)轉(zhuǎn)換如圖3所示。
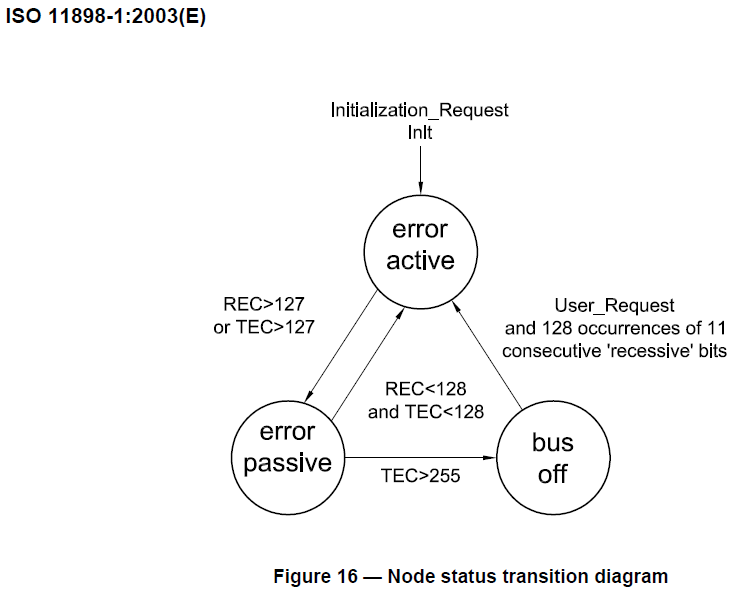
圖3 節(jié)點狀態(tài)轉(zhuǎn)換圖
當CAN控制器檢測到總線錯誤后通過發(fā)送錯誤標志指示錯誤。對于“錯誤主動”的節(jié)點,錯誤標志表現(xiàn)為“主動錯誤標志”,對于“錯誤被動”的節(jié)點,錯誤標志表現(xiàn)為“被動錯誤標志”。
無論檢測到位錯誤、填充錯誤、CRC錯誤、幀格式錯誤、還是應答錯誤,CAN控制器一般會在緊鄰的下一位發(fā)送錯誤標志。例外情況,如果檢測到的錯誤類型是CRC錯誤,錯誤標志的發(fā)送開始于ACK定界符之后的位,即幀結尾。
綜上所述,CAN控制器對錯誤的響應可概括為:根據(jù)當前的節(jié)點狀態(tài)在位流序列相應的位置用錯誤標志標示錯誤,并按照CAN規(guī)范更新錯誤計數(shù)值,進行節(jié)點狀態(tài)轉(zhuǎn)換。并且是每成功監(jiān)測到一次錯誤便進行一次響應。
注:1、由于篇幅有限,關于錯誤計數(shù)的詳細規(guī)則、節(jié)點狀態(tài)轉(zhuǎn)換以及錯誤幀格式等細節(jié)均不在本文進行討論,請讀者查閱CAN協(xié)議規(guī)范。
2、上述分析可知道,錯誤響應的關鍵要素包括錯誤標志的類型和響應的位置。
錯誤管理機制的作用
錯誤管理機制的作用主要體現(xiàn)在對錯誤的響應過程。
作為發(fā)送器發(fā)送錯誤標志時,無論“主動錯誤”還是“被動錯誤”都必然包括6個連續(xù)同極性的位,使其他節(jié)點也識別到總線錯誤,進而使所有節(jié)點都能丟棄當前出錯的幀。
作為接收器發(fā)送錯誤標志時,“主動錯誤”標志使其他節(jié)點也識別到總線錯誤從而使所有節(jié)點(包括作為發(fā)送器的節(jié)點)都能丟棄當前出錯的幀;“被動錯誤”標志不影響總線通信從而使其他節(jié)點都能成功接收當前幀,處于“被動錯誤”狀態(tài)的節(jié)點屬于“不可信”狀態(tài),其檢測到錯誤僅是自己丟棄當前幀,這也是錯誤管理的靈活性所在,即錯誤響應并不是嚴格在任何情況下都使所有節(jié)點丟棄同一幀報文。
綜上所述,錯誤管理機制可以使所有的節(jié)點同時接收或丟棄總線的同一幀報文,又可以使作為接收器的被動錯誤狀態(tài)的節(jié)點僅自己丟棄當前報文而不影響其他節(jié)點。因此,錯誤管理是實現(xiàn)CAN通信數(shù)據(jù)一致性的機制之一。
總結
CAN節(jié)點錯誤管理功能是由CAN節(jié)點組成中的CAN控制器負責的,對錯誤管理的工作過程可以從“錯誤識別”和“錯誤響應”兩個方面進行理解。錯誤管理是實現(xiàn)CAN通信數(shù)據(jù)的一致性的機制之一。
-
mcu
+關注
關注
146文章
17985瀏覽量
367328 -
CAN
+關注
關注
57文章
2921瀏覽量
467936 -
CAN節(jié)點
+關注
關注
0文章
9瀏覽量
9213
發(fā)布評論請先 登錄
CAN控制器總線錯誤分析之CAN節(jié)點BusOff恢復過程分析與測試
校驗碼工作原理解析


淺談局部網(wǎng)絡管理 基于CAN總線的局部網(wǎng)絡管理機制設計

節(jié)點位置信息驅(qū)動的終端緩存管理機制

深入探討CAN節(jié)點錯誤管理機制

虹科干貨 | 帶你全面認識“CAN總線錯誤”(二)——CAN錯誤類型

虹科干貨 | 帶你全面了解“CAN總線錯誤”(三)——CAN節(jié)點狀態(tài)與錯誤計數(shù)器
虹科干貨 | 帶你全面認識“CAN總線錯誤”(一)——CAN總線錯誤與錯誤幀
虹科干貨 | 帶你全面認識“CAN總線錯誤”(二)——CAN錯誤類型
如何驗證CAN控制器的錯誤響應機制?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論