 【CW32模塊使用】0.96寸彩屏
【CW32模塊使用】0.96寸彩屏
一、模塊來源
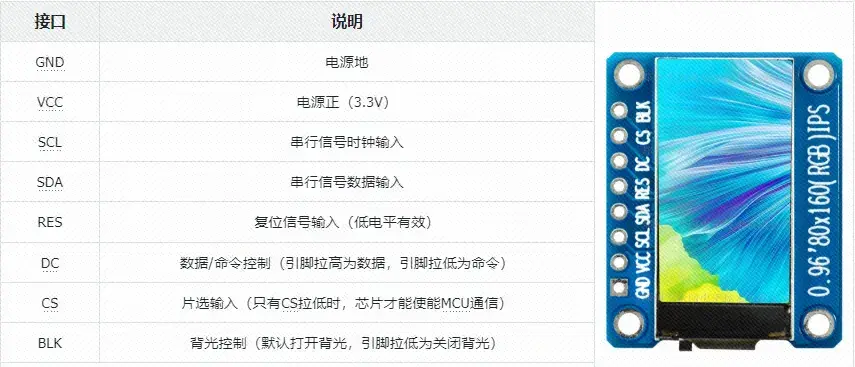
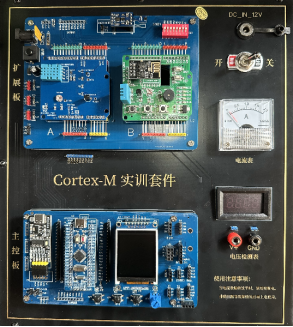
模塊實物展示:
資料下載鏈接: https://pan.baidu.com/s/19DxY8JJEzNt4XYF_CwVbDw
資料提取碼:8888
二、規格參數
工作電壓:2.8~3.3V
工作電流:30MA
模塊尺寸:24(H) x 30(V)MM
像素大小:80(H) x 160(V) RGB
驅動芯片:ST7735
通信協議:SPI
以上信息見廠家資料文件【ZJY096S0800TG01.pdf】

文件路徑
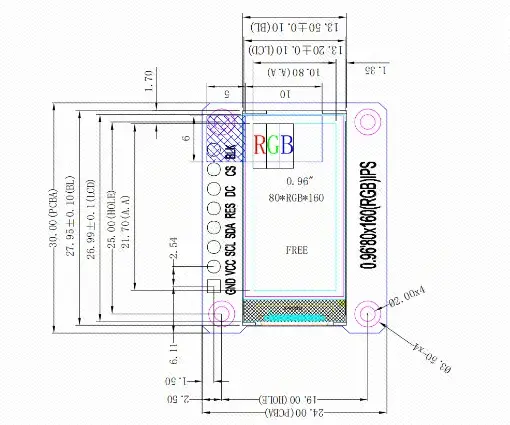
尺寸參數
三、移植過程
3.1查看資料
打開廠家資料例程(例程下載見百度網盤鏈接下載)。具體路徑見例程路徑

例程路徑
3.2移植至工程
將廠家資料路徑下的【LCD】文件夾,復制到自己的工程中。(工程可以參考入門手冊工程模板)
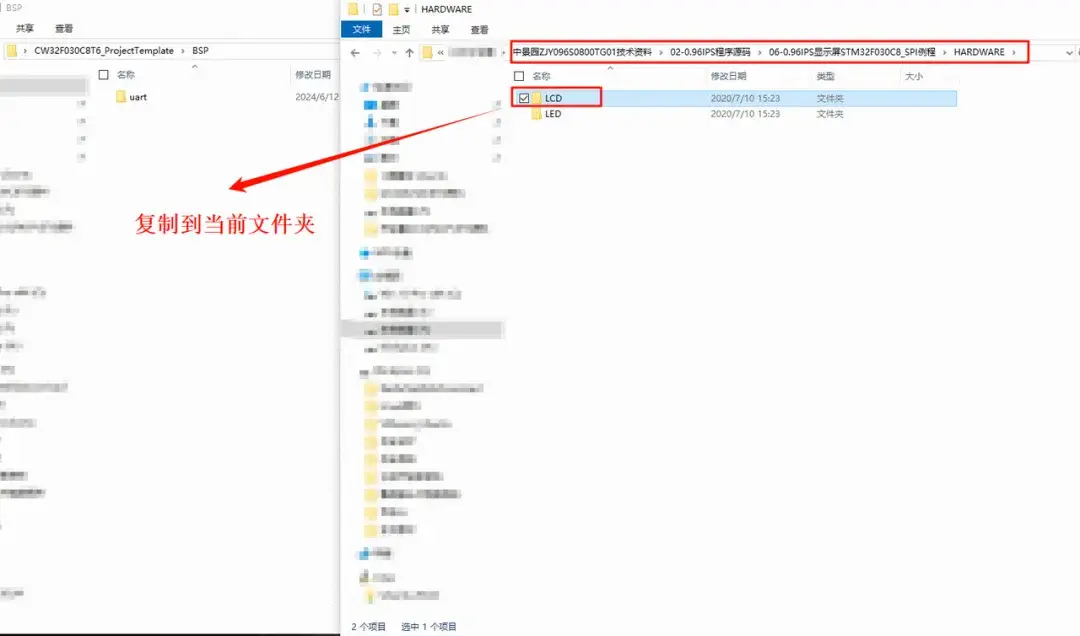
復制示意圖
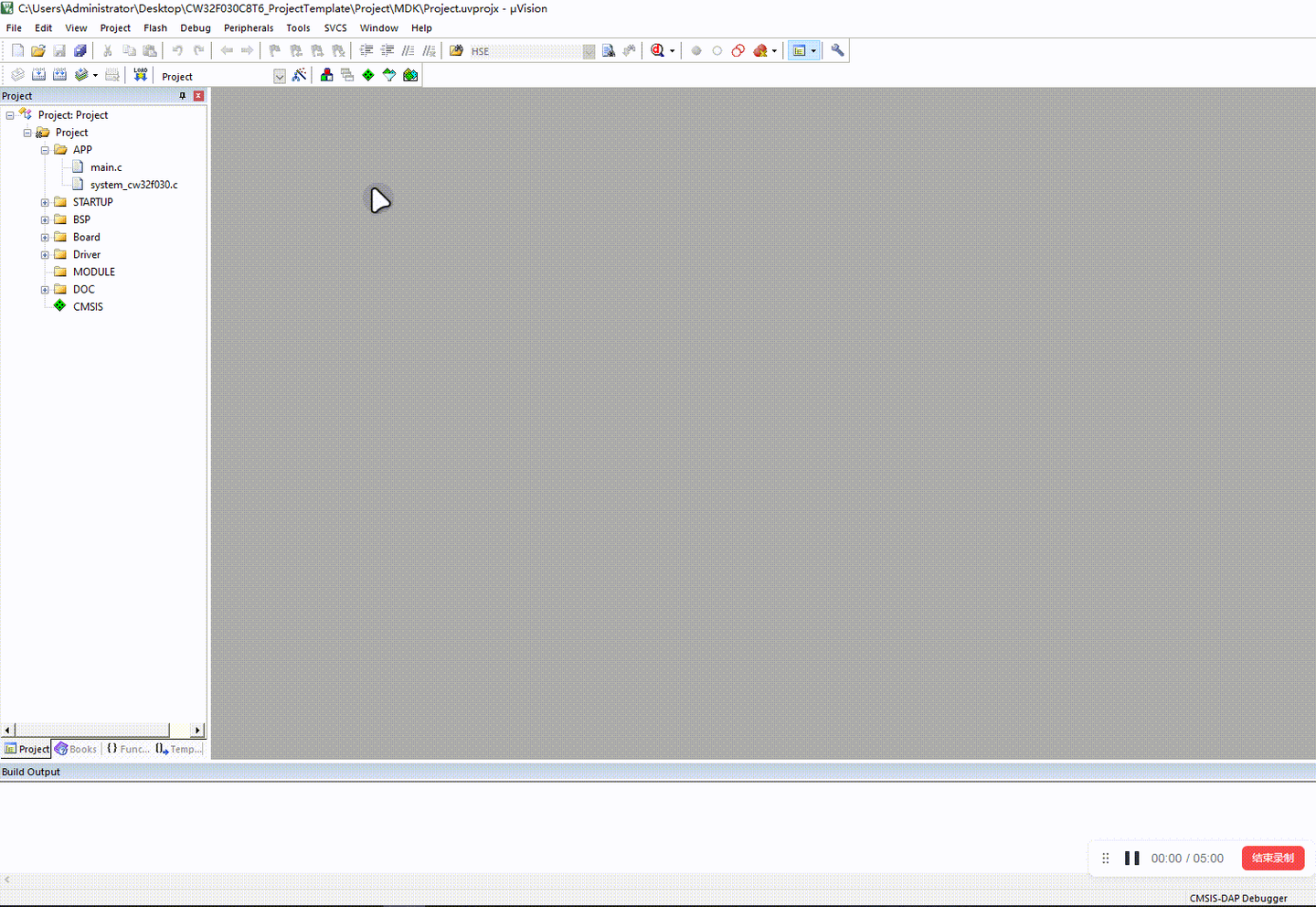
我們打開工程文件,將我們剛剛復制到文件夾中的文件,導入C文件和路徑。
將lcd_init.h文件下的 sys.h 改為 board.h。還要將lcd.h文件下的 sys.h 改為 board.h
TIP:
(在左邊將lcd.c和lcd_init.c的工程目錄展開,就發現有lcd_init.h和lcd.h)
修改lcd_init.h內容
修改lcd.h內容
將 lcd_init.c 和 lcd.c 中的 delay.h 注釋掉

首先分別在lcd_init.h與lcd.h文件中定義三個宏,u32、u16與u8。
#ifndef u8 #define u8 uint8_t #endif #ifndef u16 #define u16 uint16_t #endif #ifndef u32 #define u32 uint32_t #endif
3.3引腳選擇
該屏幕需要設置8個接口,具體接口說明見 各引腳說明。
模塊為SPI通信協議的從機,SCL為SPI信號線(SCK),SDA為SPI輸出線(MOSI),CS為SPI片選線(NSS)。 如果MCU的GPIO引腳不足,可以將屏幕的兩個引腳接口不接入MCU的GPIO。
將RES接入MCU的復位引腳,當MCU復位時,屏幕也跟著復位;
可以將BLK接入3.3V或懸空,代價是無法控制背光亮度。
下面分為軟件SPI移植與硬件SPI移植進行講解。
3.4軟件SPI移植
當前廠家源碼使用的是軟件SPI接口,SPI時序部分廠家已經完成,我們只需要將引腳和延時配置好即可。所以對應接入的屏幕引腳請按照你的需要。這里選擇的引腳見下表。
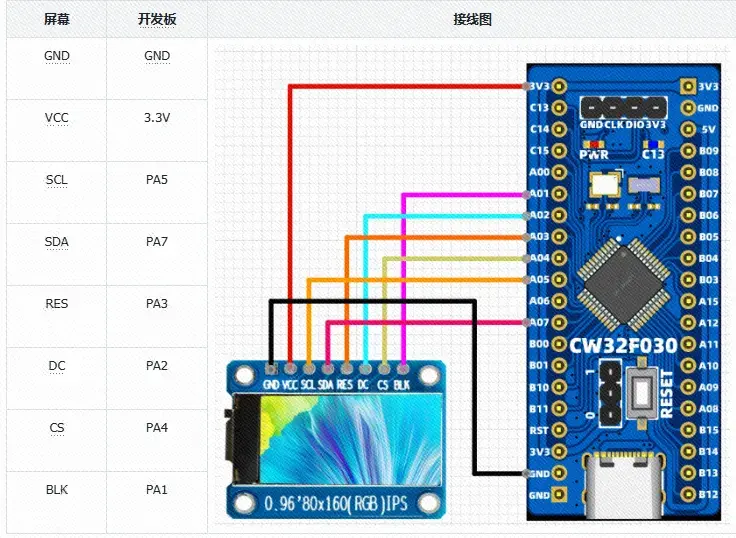
軟件SPI接線圖
選擇好引腳后,進入工程開始編寫屏幕引腳初始化代碼。
我們更改lcd_init.h中的LCD端口定義
更改后:
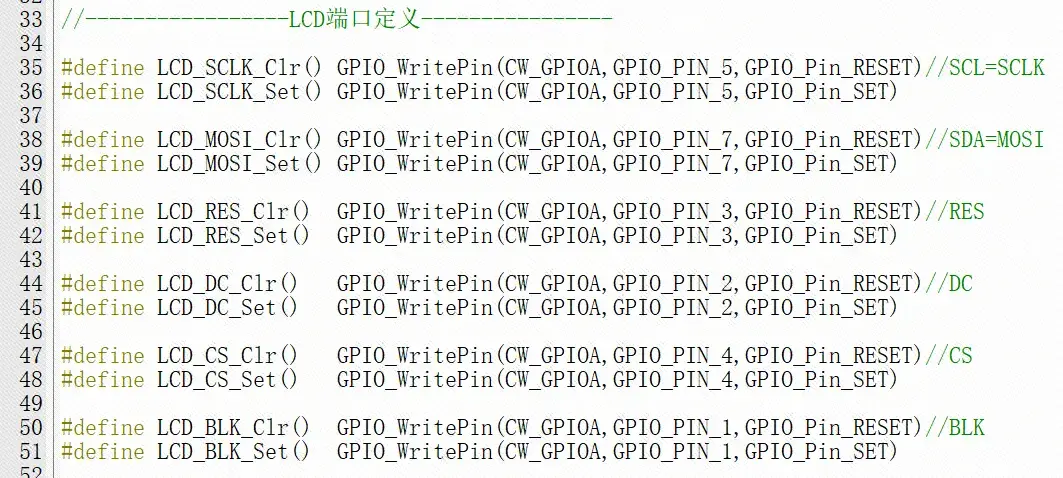
//-----------------LCD端口定義---------------- #define LCD_SCLK_Clr() GPIO_WritePin(CW_GPIOA,GPIO_PIN_5,GPIO_Pin_RESET)//SCL=SCLK #define LCD_SCLK_Set() GPIO_WritePin(CW_GPIOA,GPIO_PIN_5,GPIO_Pin_SET) #define LCD_MOSI_Clr() GPIO_WritePin(CW_GPIOA,GPIO_PIN_7,GPIO_Pin_RESET)//SDA=MOSI #define LCD_MOSI_Set() GPIO_WritePin(CW_GPIOA,GPIO_PIN_7,GPIO_Pin_SET) #define LCD_RES_Clr() GPIO_WritePin(CW_GPIOA,GPIO_PIN_3,GPIO_Pin_RESET)//RES #define LCD_RES_Set() GPIO_WritePin(CW_GPIOA,GPIO_PIN_3,GPIO_Pin_SET) #define LCD_DC_Clr() GPIO_WritePin(CW_GPIOA,GPIO_PIN_2,GPIO_Pin_RESET)//DC #define LCD_DC_Set() GPIO_WritePin(CW_GPIOA,GPIO_PIN_2,GPIO_Pin_SET) #define LCD_CS_Clr() GPIO_WritePin(CW_GPIOA,GPIO_PIN_4,GPIO_Pin_RESET)//CS #define LCD_CS_Set() GPIO_WritePin(CW_GPIOA,GPIO_PIN_4,GPIO_Pin_SET) #define LCD_BLK_Clr() GPIO_WritePin(CW_GPIOA,GPIO_PIN_1,GPIO_Pin_RESET)//BLK #define LCD_BLK_Set() GPIO_WritePin(CW_GPIOA,GPIO_PIN_1,GPIO_Pin_SET)
引腳初始化配置見如下代碼。
void LCD_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct; // GPIO初始化結構體
__RCC_GPIOA_CLK_ENABLE(); // 使能GPIOA時鐘
GPIO_InitStruct.Pins = GPIO_PIN_5| // GPIO引腳
GPIO_PIN_7|
GPIO_PIN_3|
GPIO_PIN_2|
GPIO_PIN_4|
GPIO_PIN_1;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // 推挽輸出
GPIO_InitStruct.Speed = GPIO_SPEED_HIGH; // 輸出速度高
GPIO_Init(CW_GPIOA, &GPIO_InitStruct); // 初始化
LCD_SCLK_Set();
LCD_MOSI_Set();
LCD_RES_Set();
LCD_DC_Set();
LCD_CS_Set();
LCD_BLK_Set();
}
到這里軟件SPI就移植完成了,可移步到4節進行移植驗證。
3.5硬件SPI移植
硬件SPI與軟件SPI相比,硬件SPI是靠硬件上面的SPI控制器,所有的時鐘邊緣采樣,時鐘發生,還有時序控制,都是由硬件完成的。它降低了CPU的使用率,提高了運行速度。軟件SPI就是用代碼控制IO輸出高低電平,模擬SPI的時序,這種方法通信速度較慢,且不可靠。
想要使用硬件SPI驅動屏幕,需要確定使用的引腳是否有SPI外設功能。可以通過數據手冊進行查看。
數據手冊和用戶手冊都在百度網盤資料,網盤地址看入門手冊。
當前使用的是硬件SPI接口,而屏幕我們只需要控制它,而不需要讀取屏幕的數據,故使用的是3線的SPI,只使用到了時鐘線SCK、主機輸出從機輸入線MOSI和軟件控制的片選線NSS。而NSS我們使用的是軟件控制,所以除了SCL(SCK)/SDA(MOSI)引腳需要使用硬件SPI功能的引腳外,其他引腳都可以使用開發板上其他的GPIO。這里選擇使用PA5/PA7的SPI復用功能。其他對應接入的屏幕引腳請按照你的需要。這里選擇的引腳見下表。

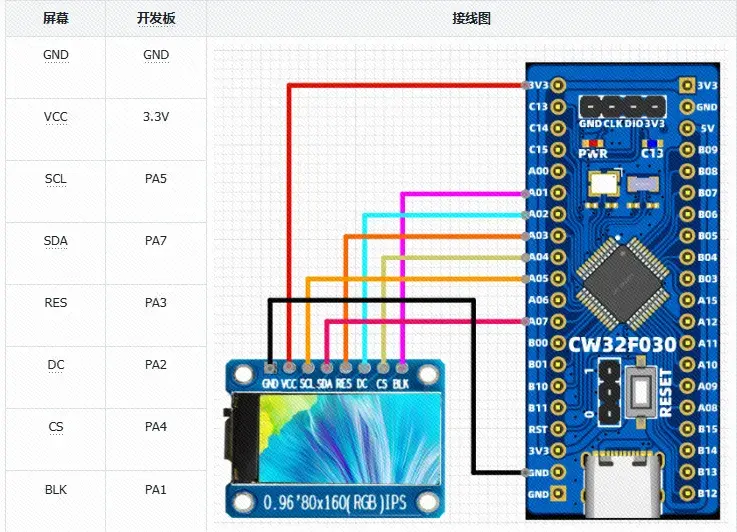
接線圖
選擇好引腳后,進入工程開始編寫屏幕引腳初始化代碼。
將lcd_init.h中的 LCD端口定義 宏,修改
//-----------------LCD端口定義---------------- #define BSP_GPIO_PORT CW_GPIOA // 端口 #define BSP_SPI1 CW_SPI1 //GPIO AF #define SPI1_AF_SCK() PA05_AFx_SPI1SCK() #define SPI1_AF_MOSI() PA07_AFx_SPI1MOSI() #define LCD_RES_Clr() GPIO_WritePin(CW_GPIOA,GPIO_PIN_3,GPIO_Pin_RESET)//RES #define LCD_RES_Set() GPIO_WritePin(CW_GPIOA,GPIO_PIN_3,GPIO_Pin_SET) #define LCD_DC_Clr() GPIO_WritePin(CW_GPIOA,GPIO_PIN_2,GPIO_Pin_RESET)//DC #define LCD_DC_Set() GPIO_WritePin(CW_GPIOA,GPIO_PIN_2,GPIO_Pin_SET) #define LCD_CS_Clr() GPIO_WritePin(CW_GPIOA,GPIO_PIN_4,GPIO_Pin_RESET)//CS #define LCD_CS_Set() GPIO_WritePin(CW_GPIOA,GPIO_PIN_4,GPIO_Pin_SET) #define LCD_BLK_Clr() GPIO_WritePin(CW_GPIOA,GPIO_PIN_1,GPIO_Pin_RESET)//BLK #define LCD_BLK_Set() GPIO_WritePin(CW_GPIOA,GPIO_PIN_1,GPIO_Pin_SET)
引腳初始化配置見如下代碼。
void LCD_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct; // GPIO初始化結構體
__RCC_GPIOA_CLK_ENABLE(); // 使能GPIOA時鐘
__RCC_SPI1_CLK_ENABLE(); // 使能SPI1時鐘
// GPIO復用為SPI1
SPI1_AF_SCK();
SPI1_AF_MOSI();
GPIO_InitStruct.Pins = GPIO_PIN_5| // GPIO引腳
GPIO_PIN_7|
GPIO_PIN_3|
GPIO_PIN_2|
GPIO_PIN_4|
GPIO_PIN_1;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // 推挽輸出
GPIO_InitStruct.Speed = GPIO_SPEED_HIGH; // 輸出速度高
GPIO_Init(BSP_GPIO_PORT, &GPIO_InitStruct); // 初始化
// 拉高
LCD_RES_Set();
LCD_DC_Set();
LCD_CS_Set();
LCD_BLK_Set();
SPI_InitTypeDef SPI_InitStructure; // SPI 初始化結構體
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; // 雙線全雙工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; // 主機模式
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; // 幀數據長度為8bit
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; // 時鐘空閑電平為高
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; // 第二個邊沿采樣
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; // 片選信號由SSI寄存器控制
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_8; // 波特率為PCLK的8分頻
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; // 最高有效位 MSB 收發在前
SPI_InitStructure.SPI_Speed = SPI_Speed_Low; // 低速SPI
SPI_Init(BSP_SPI1, &SPI_InitStructure); // 初始化
SPI_Cmd(BSP_SPI1, ENABLE); // 使能SPI1
}
初始化部分完,還需要修改發送數據部分。源代碼中使用的是軟件SPI,時序是由廠家編寫完成的。我們使用硬件SPI則需要對其進行修改。
在lcd_init.c文件中,將源代碼的**void LCD_Writ_Bus(u8 dat)**函數修改為
/******************************************************************************
函數說明:LCD串行數據寫入函數
入口數據:dat 要寫入的串行數據
返回值: 無
******************************************************************************/
void LCD_Writ_Bus(u8 dat)
{
LCD_CS_Clr();
while (SPI_GetFlagStatus(BSP_SPI1, SPI_FLAG_TXE) == RESET);
SPI_SendData(BSP_SPI1, dat); // 發送數據
while (SPI_GetFlagStatus(BSP_SPI1, SPI_FLAG_RXNE) == RESET);
uint16_t temp = SPI_ReceiveData(BSP_SPI1); // 返回數據
LCD_CS_Set();
}
到這里硬件SPI就移植完成了,請移步到4節進行移植驗證。
四、移植驗證
在main.c中輸入代碼如下
/* * Change Logs: * Date Author Notes * 2024-06-17 LCKFB-LP first version */ #include "board.h" #include "stdio.h" #include "bsp_uart.h" #include "lcd_init.h" #include "lcd.h" #include "pic.h" int32_t main(void) { board_init(); // 開發板初始化 uart1_init(115200); // 串口1波特率115200 float t = 0; LCD_Init();//屏幕初始化 LCD_Fill(0,0,LCD_W,LCD_H,BLACK);//清全屏為黑色 while(1) { LCD_ShowString(0,16*2,(uint8_t *)"LCD_W:",WHITE,BLACK,16,0); LCD_ShowIntNum(48,16*2,LCD_W,3,WHITE,BLACK,16); LCD_ShowString(80,16*2,(uint8_t *)"LCD_H:",WHITE,BLACK,16,0); LCD_ShowIntNum(128,16*2,LCD_H,3,WHITE,BLACK,16); LCD_ShowString(0,16*3,(uint8_t *)"Nun:",WHITE,BLACK,16,0); LCD_ShowFloatNum1(8*4,16*3,t,4,WHITE,BLACK,16); t+=0.11; delay_ms(1000); } }
上電效果:

移植成功案例(軟件和硬件SPI): 鏈接:https://pan.baidu.com/s/1vOc_MRAg5nu_8_KFVdlf9w?pwd=LCKF 提取碼:LCKF
-
模塊
+關注
關注
7文章
2763瀏覽量
48639 -
移植
+關注
關注
1文章
391瀏覽量
28446 -
SPI
+關注
關注
17文章
1742瀏覽量
93637 -
CW32
+關注
關注
1文章
232瀏覽量
982
發布評論請先 登錄
相關推薦

【項目展示】基于CW32的遙控循跡小車

cw32和stm32的區別
cw32和gd32的區別


基于CW32的遙控循跡小車





 工商網監
工商網監
評論