") 為什么Uber自動(dòng)駕駛會(huì)撞死人?
為什么Uber自動(dòng)駕駛會(huì)撞死人?
美國(guó)當(dāng)?shù)貢r(shí)間3月18日晚上十點(diǎn),一輛 Uber 的自動(dòng)駕駛汽車(chē)在亞利桑那州坦佩市的公共道路上與一名行人相撞,該行人在送往醫(yī)院后不治身亡。這是世界上首起自動(dòng)駕駛車(chē)輛在公共道路上撞擊行人并致死的事件。
事件發(fā)生于鳳凰城以東11英里的Tempe鎮(zhèn)。當(dāng)時(shí),這輛SUV正在向北行駛,一名女子在人行橫道外穿,被車(chē)輛撞倒。據(jù)當(dāng)?shù)孛襟w、亞利桑那州美國(guó)廣播公司新聞附屬公司ABC 15報(bào)道,她后來(lái)被送往醫(yī)院,后由于傷勢(shì)過(guò)重死亡。
這是首次在自動(dòng)駕駛模式下運(yùn)行的自動(dòng)駕駛車(chē)輛導(dǎo)致人員死亡,這對(duì)無(wú)人車(chē)的未來(lái)及其在道路上的使用產(chǎn)生巨大影響。當(dāng)時(shí)車(chē)上的安全駕駛員有可能要負(fù)法律責(zé)任,因?yàn)槠渥饔檬谴_保車(chē)輛的安全運(yùn)行,但在許多方面,這一事件的結(jié)果將確定無(wú)人車(chē)監(jiān)管的前進(jìn)道路。
Uber首席執(zhí)行官Dara Khosrowshahi在Twitter上表達(dá)了對(duì)受害者家屬的同情,并重申Uber正在與當(dāng)?shù)卣献鞔_定究竟發(fā)生了什么。
那么具有眾多安全保障的自動(dòng)駕駛為什會(huì)撞死人?為什么沒(méi)有看見(jiàn)該行人?下面我們做一個(gè)簡(jiǎn)要分析:
當(dāng)時(shí)Uber無(wú)人駕駛測(cè)試車(chē)確實(shí)處于自動(dòng)駕駛狀態(tài),而且車(chē)上配有安全員,但位于后車(chē)座。
造成事故的Uber無(wú)人駕駛測(cè)試車(chē),改裝自沃爾沃XC90 SUV,但軟件系統(tǒng)和識(shí)別感知方案全為Uber后添加,車(chē)頂裝有激光雷達(dá)和相機(jī)等傳感器,是目前較為主流的自動(dòng)駕駛方案。如下圖:
車(chē)頂激光雷達(dá):這些車(chē)頂部的桶形物品是激光雷達(dá),或者是光檢測(cè)和測(cè)距系統(tǒng),可以每秒多次產(chǎn)生汽車(chē)周?chē)h(huán)境的3D圖像。利用紅外激光脈沖將物體反射回傳感器,激光雷達(dá)可以在白天或夜晚非常詳細(xì)地檢測(cè)靜電和移動(dòng)物體。
大雪和大霧可能會(huì)遮擋激光雷達(dá)的激光,其準(zhǔn)確度會(huì)隨著射程的降低而降低,但對(duì)于幾英尺到幾百英尺的任何事物來(lái)說(shuō),它都是一款非常有用的成像工具,幾乎可以在任何自動(dòng)駕駛汽車(chē)上找到。如果操作正確,激光雷達(dá)裝置應(yīng)該能夠辨認(rèn)出人,如果他們還沒(méi)有完全被遮擋,而他們?nèi)匀辉谝话俣嘤⒊哌h(yuǎn)的地方,并且將他們的存在傳遞給“大腦”圖像。
前置雷達(dá):雷達(dá)像激光雷達(dá)一樣發(fā)出信號(hào)并等待其反彈,但它使用無(wú)線(xiàn)電波而不是光。這使得它更能抵抗干擾,因?yàn)闊o(wú)線(xiàn)電可以穿過(guò)雪和霧,但也會(huì)降低其分辨率并改變其射程曲線(xiàn)。
具體要看Uber采用的雷達(dá)單元(可能在正面和背面有多個(gè)以提供360度的覆蓋范圍),范圍可能有很大差異。如果它是為了補(bǔ)充激光雷達(dá),那么它可能會(huì)相當(dāng)重疊,但它更多地用于識(shí)別其他汽車(chē)和更大的障礙物。人的雷達(dá)簽名可能不被識(shí)別,但很可能他們至少會(huì)出現(xiàn),確認(rèn)激光雷達(dá)檢測(cè)到的是什么。
長(zhǎng)短距的光學(xué)攝像機(jī):激光雷達(dá)和雷達(dá)非常適用于鑒別形狀,但它們不適合閱讀標(biāo)志,弄清楚是什么顏色,等等。這是可見(jiàn)光相機(jī)的任務(wù),它擁有先進(jìn)的計(jì)算機(jī)視覺(jué)算法,能夠?qū)崟r(shí)在其圖像上運(yùn)行。Uber車(chē)輛上的攝像頭可以看到前面剎車(chē)的車(chē)輛(突然紅燈),交通信號(hào)燈,過(guò)街行人等信息模式。尤其是在汽車(chē)的前端,會(huì)使用多個(gè)角度和類(lèi)型的攝像頭,以便全面了解汽車(chē)駕駛的場(chǎng)景。
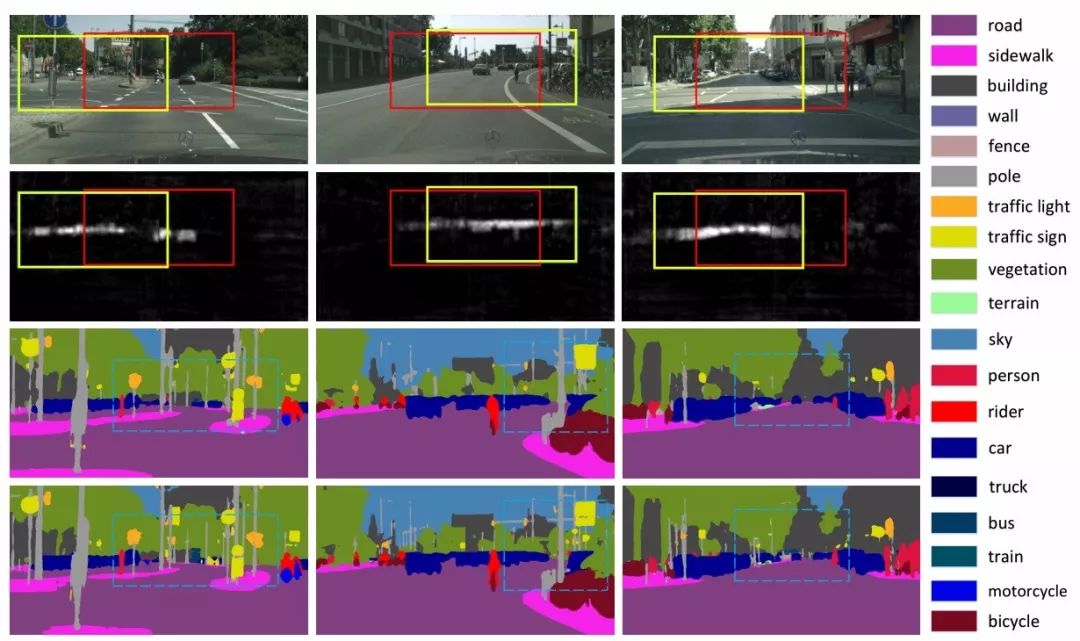
檢測(cè)人是最常見(jiàn)的計(jì)算機(jī)視覺(jué)問(wèn)題之一,并且實(shí)現(xiàn)它的算法已經(jīng)非常好。“細(xì)分”圖像通,通常還包括識(shí)別標(biāo)志,樹(shù)木,人行道等等。也就是說(shuō),很明顯的問(wèn)題就是晚上可能監(jiān)測(cè)很難。所以前兩個(gè)系統(tǒng)保障白天和晚上都在工作。即使在漆黑的夜晚,穿著黑色的人也會(huì)出現(xiàn)在激光雷達(dá)和雷達(dá)上,警告汽車(chē)它可能應(yīng)該放慢速度,并看到那個(gè)人。這可能就是為什么夜視系統(tǒng)在自動(dòng)駕駛車(chē)輛中不常見(jiàn)的原因(我不能確定優(yōu)步車(chē)上沒(méi)有一個(gè),但似乎不太可能)。
安全駕駛員:把一個(gè)人稱(chēng)為一個(gè)系統(tǒng),聽(tīng)起來(lái)可能不爽。但安全駕駛員的確是無(wú)人車(chē)安全系統(tǒng)的中的重要一個(gè)部分。即使人眼沒(méi)有激光,人們?nèi)匀环浅I朴跈z測(cè)事物。而且我們的反應(yīng)時(shí)間并不是最好的,但是如果汽車(chē)沒(méi)有反應(yīng),或者反應(yīng)錯(cuò)誤,經(jīng)過(guò)培訓(xùn)的安全駕駛員會(huì)做出正確的反應(yīng)。不過(guò)當(dāng)時(shí)Uber無(wú)人駕駛車(chē)上的安全員位于后車(chē)座,所以在看到出事之前除了大叫之外,不知道這個(gè)安全員還能起到什么作用?
值得一提的是,還有一個(gè)中央計(jì)算單元從這些來(lái)源獲取輸入信息,并在汽車(chē)周?chē)鷦?chuàng)建更完整的場(chǎng)景。例如,一個(gè)人可能會(huì)在系統(tǒng)傳感器前面的汽車(chē)后面消失,并且在一秒鐘或兩秒鐘內(nèi)看不見(jiàn)了,但這并不意味著他消失了。不過(guò)這超越了簡(jiǎn)單的對(duì)象識(shí)別,并開(kāi)始引入更廣泛的智能概念,如對(duì)象持久性,預(yù)測(cè)行為等。這可能是無(wú)人駕駛汽車(chē)系統(tǒng)中最先進(jìn)和最嚴(yán)密的部分,因此外界無(wú)人知曉了。
-
無(wú)人駕駛
+關(guān)注
關(guān)注
99文章
4152瀏覽量
122891 -
Uber
+關(guān)注
關(guān)注
0文章
416瀏覽量
36692
原文標(biāo)題:從技術(shù)角度分析:為什么Uber自動(dòng)駕駛會(huì)撞死人
文章出處:【微信號(hào):indRobot,微信公眾號(hào):工業(yè)機(jī)器人】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
自動(dòng)駕駛安全基石:ODD
《汽車(chē)駕駛自動(dòng)化分級(jí)》會(huì)更適合中國(guó)自動(dòng)駕駛發(fā)展嗎?


劉強(qiáng)東,進(jìn)軍汽車(chē)領(lǐng)域# 京東# 自動(dòng)駕駛# 自動(dòng)駕駛出租車(chē)# 京東自動(dòng)駕駛快遞車(chē)
文遠(yuǎn)知行獲Uber大力支持!自動(dòng)駕駛規(guī)模化運(yùn)營(yíng)加速開(kāi)啟!

Momenta與Uber達(dá)成戰(zhàn)略合作
從《自動(dòng)駕駛地圖數(shù)據(jù)規(guī)范》聊高精地圖在自動(dòng)駕駛中的重要性

自動(dòng)駕駛汽車(chē)安全嗎?


自動(dòng)駕駛HiL測(cè)試方案案例分析--ADS HiL測(cè)試系統(tǒng)#ADAS #自動(dòng)駕駛 #VTHiL
自動(dòng)駕駛技術(shù)的典型應(yīng)用 自動(dòng)駕駛技術(shù)涉及到哪些技術(shù)

自動(dòng)駕駛HiL測(cè)試方案——攝像頭仿真之視頻注入#ADAS #自動(dòng)駕駛 #VTHiL

自動(dòng)駕駛HiL測(cè)試方案 ——場(chǎng)景仿真3D演示#ADAS #自動(dòng)駕駛 #VTHiL






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論