") 基于RV1126開發(fā)板實現(xiàn)人員檢測方案
基于RV1126開發(fā)板實現(xiàn)人員檢測方案
1. 方案簡介
人員檢測:在圖像中找出人。
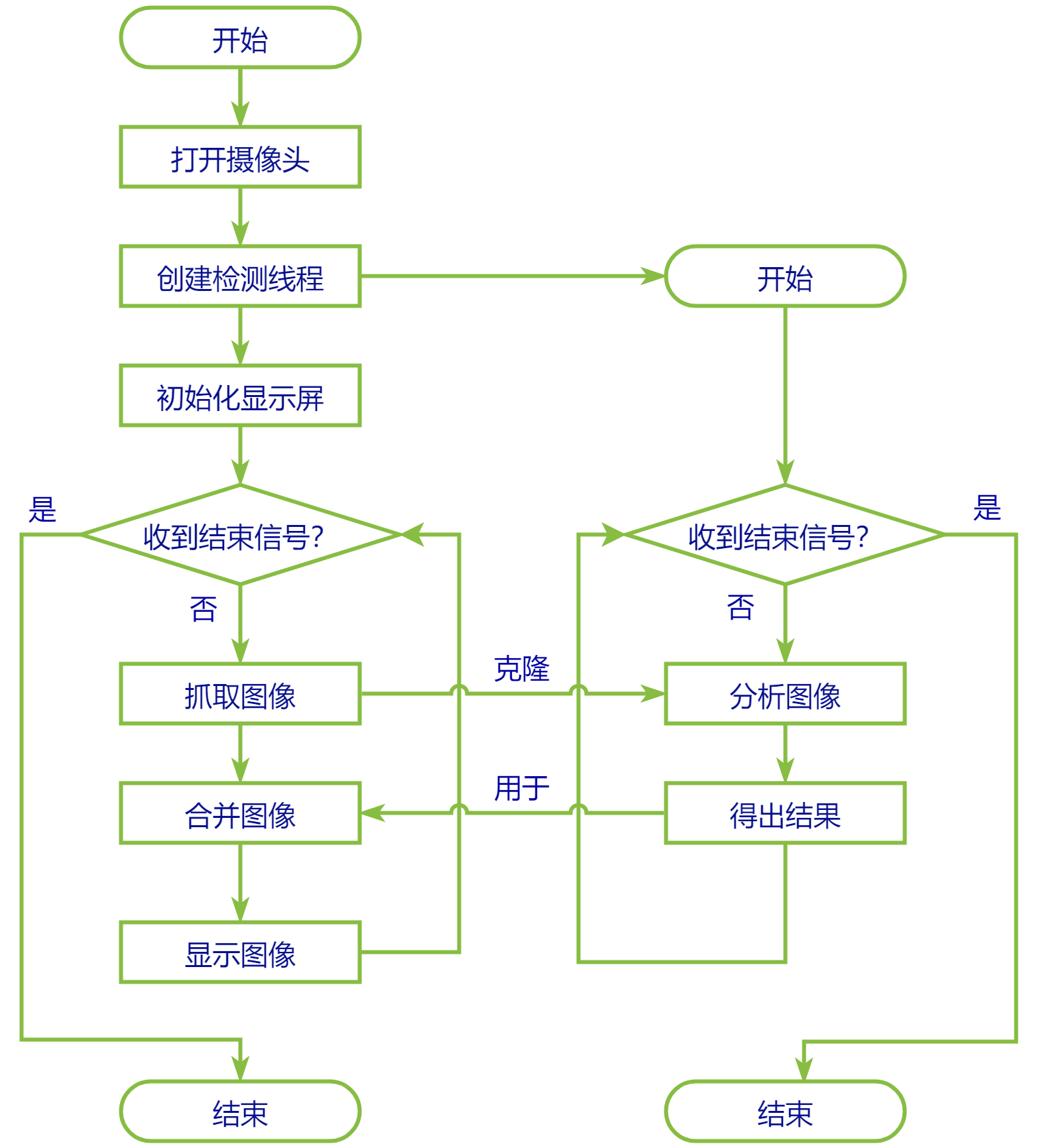
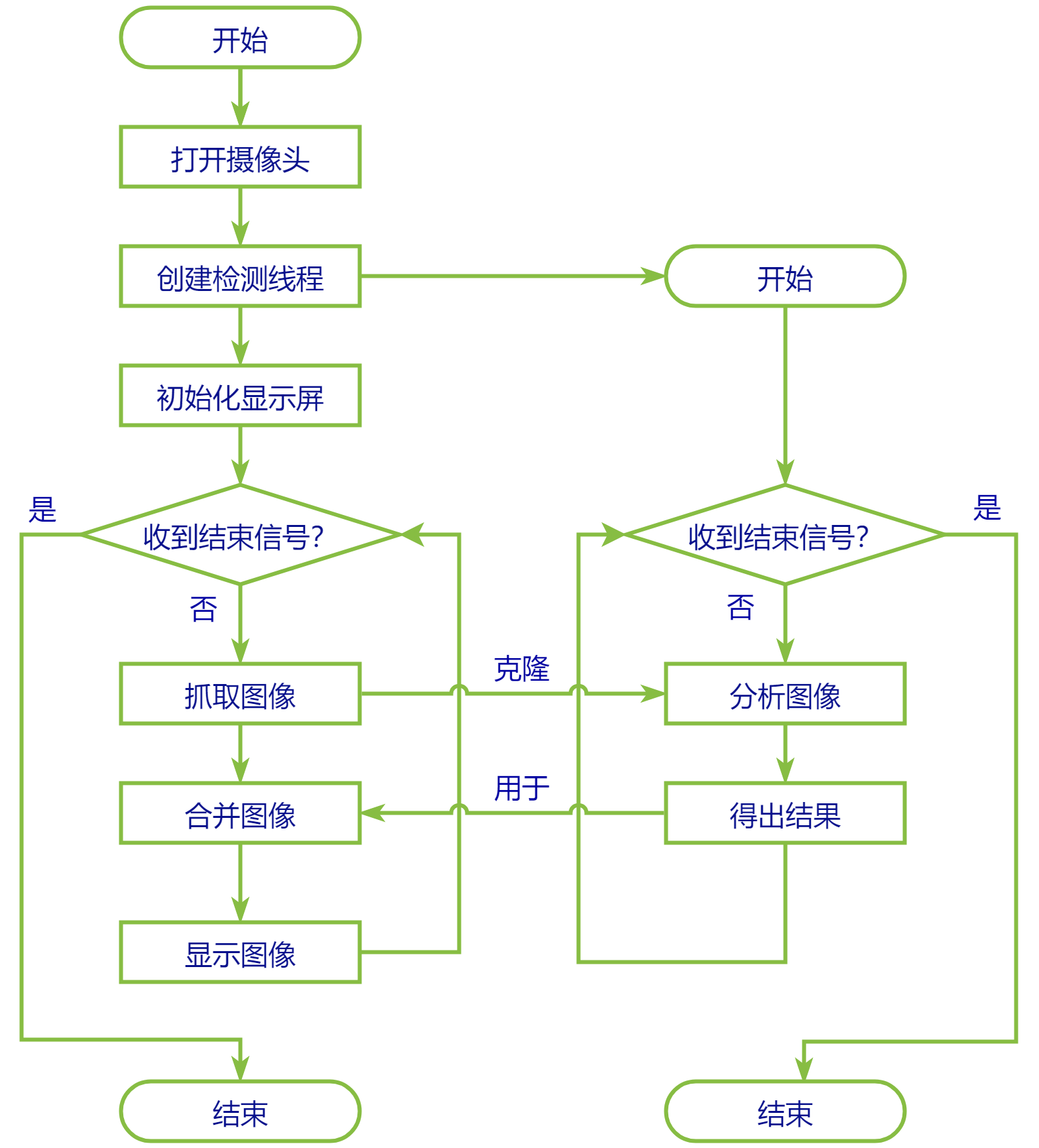
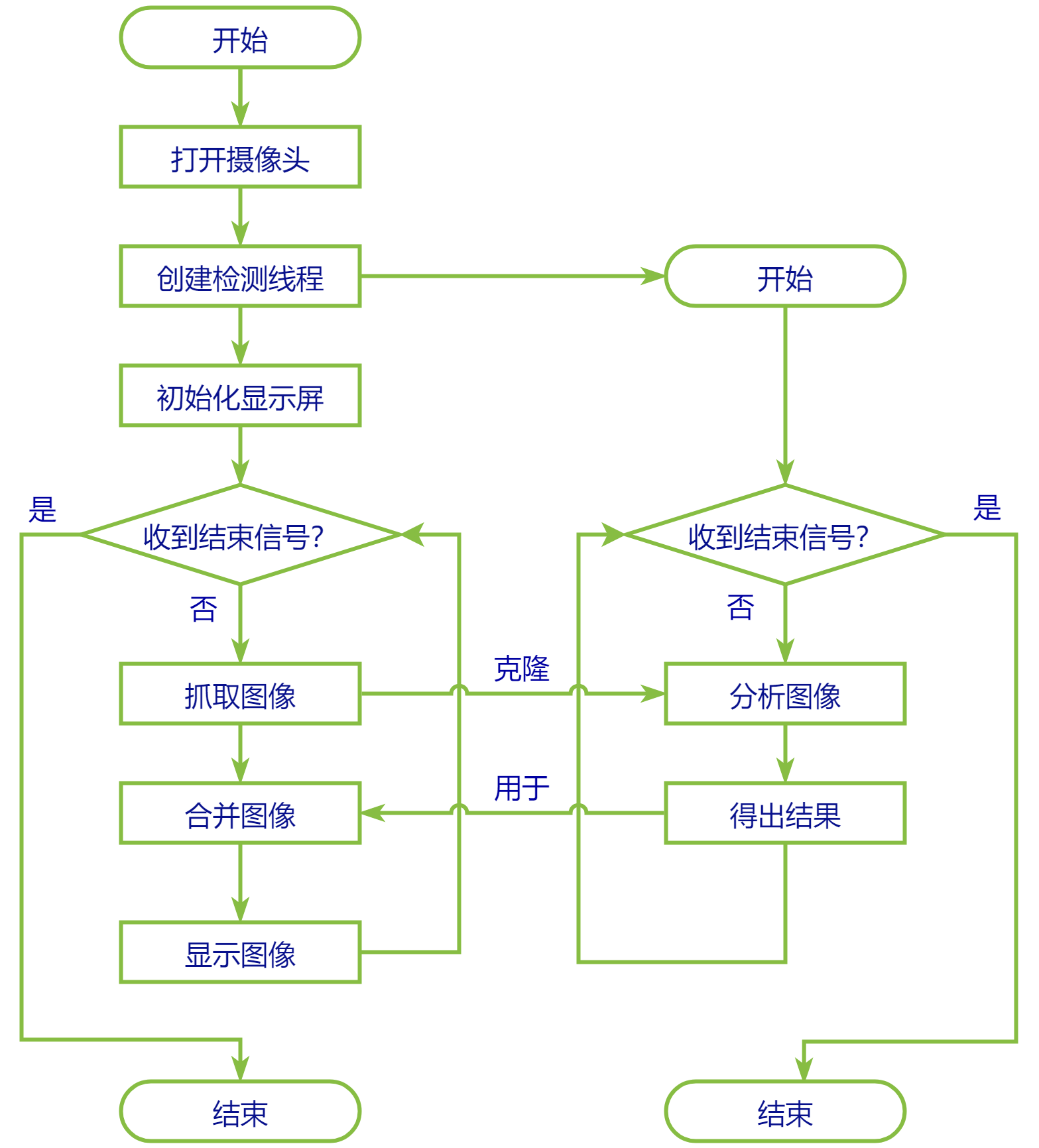
方案設(shè)計邏輯流程圖,方案代碼分為分為兩個業(yè)務(wù)流程,主體代碼負責(zé)抓取、合成圖像,算法代碼負責(zé)人員檢測功能。
2. 快速上手
2.1 開發(fā)環(huán)境準備
如果您初次閱讀此文檔,請閱讀《入門指南/開發(fā)環(huán)境準備/Easy-Eai編譯環(huán)境準備與更新》,并按照其相關(guān)的操作,進行編譯環(huán)境的部署。
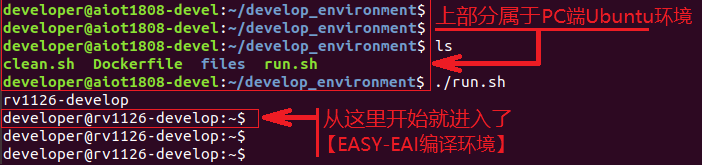
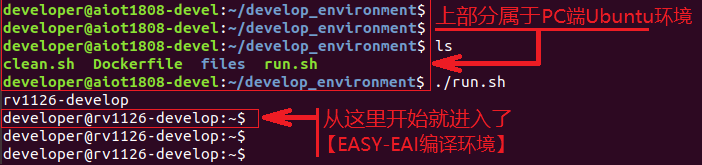
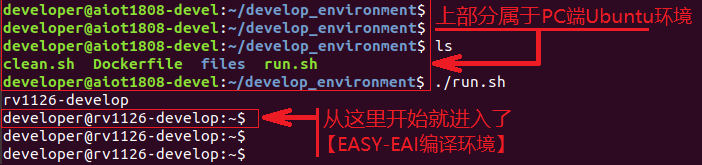
在PC端Ubuntu系統(tǒng)中執(zhí)行run腳本,進入EASY-EAI編譯環(huán)境,具體如下所示。
cd ~/develop_environment ./run.sh
2.2 源碼下載以及實例編譯
在EASY-EAI編譯環(huán)境下創(chuàng)建存放源碼倉庫的管理目錄:
cd /opt mkdir EASY-EAI-Toolkit cd EASY-EAI-Toolkit
通過git工具,在管理目錄內(nèi)克隆遠程倉庫
git clone https://github.com/EASY-EAI/EASY-EAI-Toolkit-C-Solution.git

注:
* 此處可能會因網(wǎng)絡(luò)原因造成卡頓,請耐心等待。
* 如果實在要在gitHub網(wǎng)頁上下載,也要把整個倉庫下載下來,不能單獨下載本實例對應(yīng)的目錄。
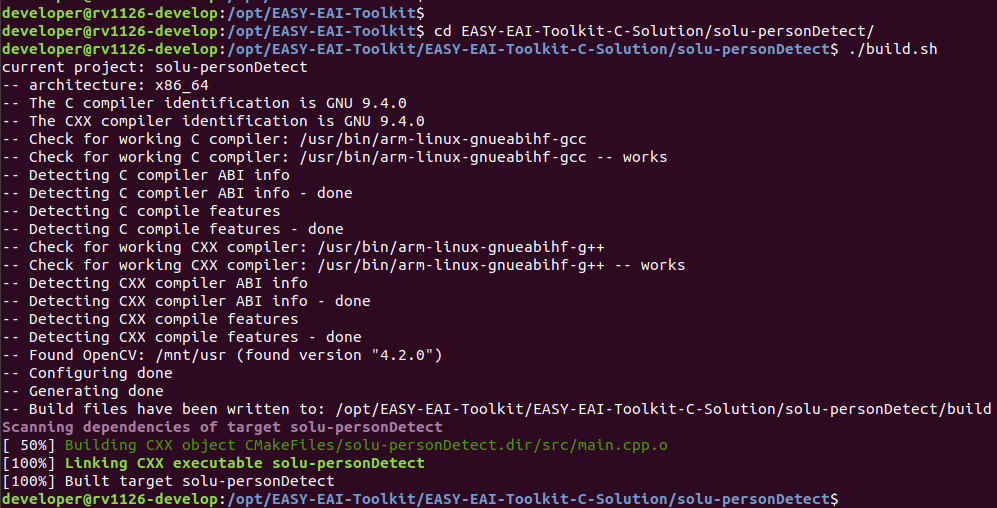
進入到對應(yīng)的例程目錄執(zhí)行編譯操作,具體命令如下所示:
cd EASY-EAI-Toolkit-C-Solution/solu-personDetect/ ./build.sh
注:
* 由于依賴庫部署在板卡上,因此交叉編譯過程中必須保持adb連接。
注:
* 若build.sh腳本不帶任何參數(shù),則僅會拷貝solution編譯出來的可執(zhí)行文件。
* 若build.sh腳本帶有cpres參數(shù),則會把Release/目錄下的所有資源都拷貝到開發(fā)板上。
* 若build.sh腳本帶有clear參數(shù),則會把build/目錄和Release/目錄刪除。
2.3 模型獲取
【百度網(wǎng)盤】
鏈接:https://pan.baidu.com/s/1mrhVHxHWJ8cY9Fl9k5KtYg
提取碼:0k7j
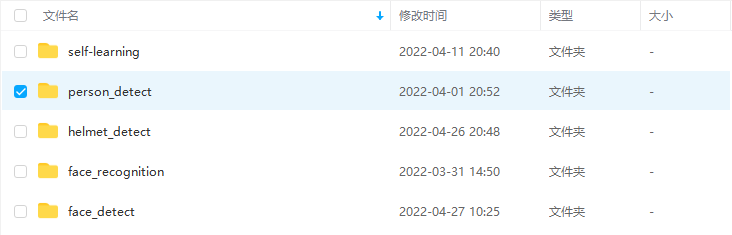
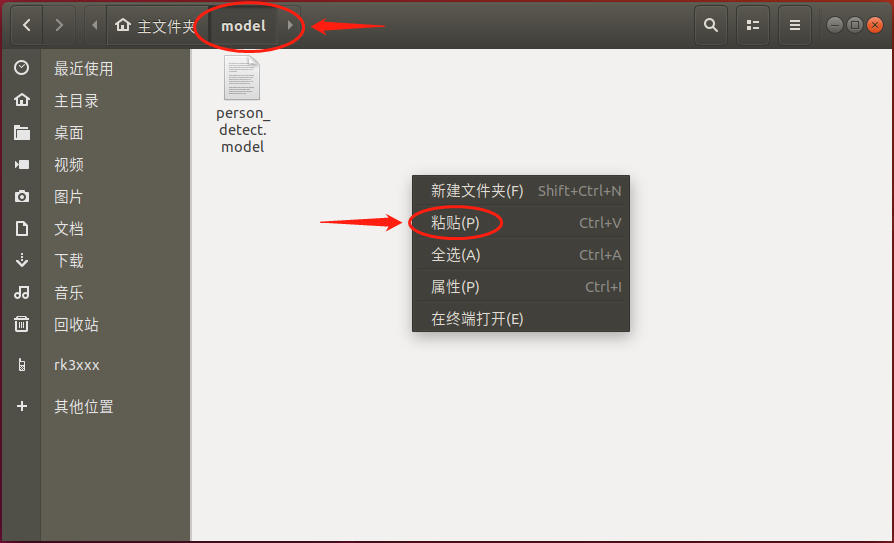
本方案用到模型:person_detect.model
直接把模型下載到本地Windows主機,復(fù)制

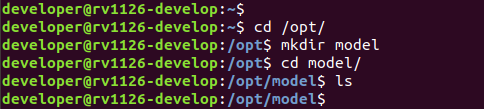
進入PC端Ubuntu創(chuàng)建存放model目錄:
cd /opt mkdir model
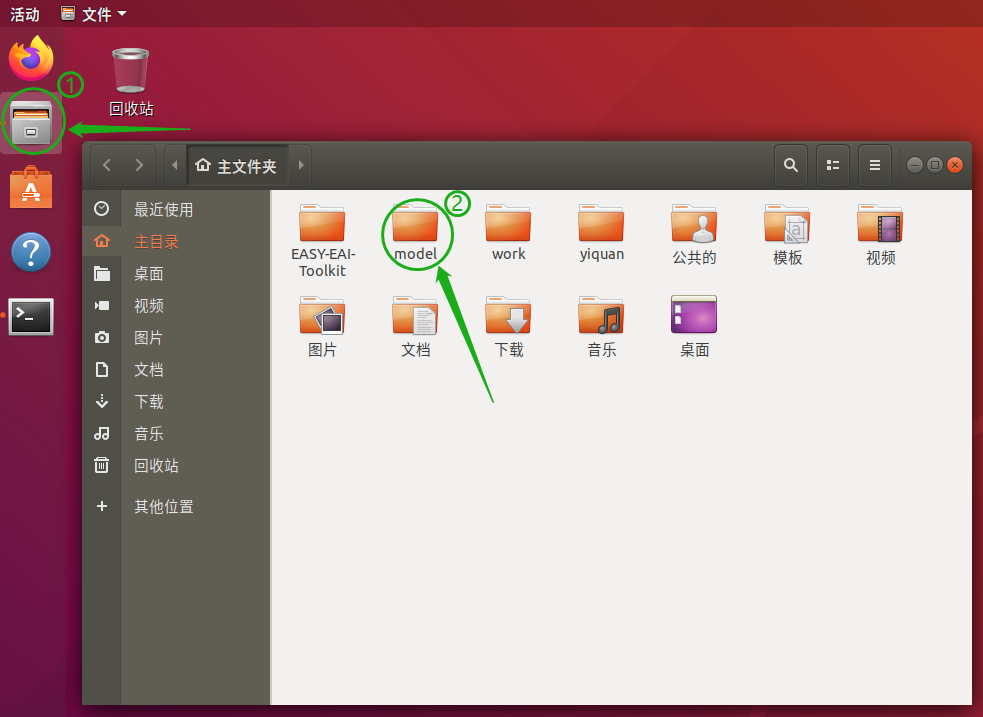
然后把模型從本地Windows主機粘貼到PC端Ubuntu中:
2.4 方案部署
使用下方命令再次回到開發(fā)實例目錄
cd /opt/EASY-EAI-Toolkit-C-Solution/solu-personDetect/
然后,將EASY-EAI編譯環(huán)境的編譯結(jié)果部署到板卡中(有兩種方法)。
方法一:通過執(zhí)行以下命令手動部署【推薦】
cp Release/solu-* /mnt/userdata/Solu
方法二:在編譯時加上編譯參數(shù)自動部署
./build.sh cpres
最后,將準備好的模型部署到板卡中(注意:模型要放到編譯結(jié)果的同一目錄中),執(zhí)行命令如下所示。
cp /opt/model/person_detect.model /mnt/userdata/Solu
2.5 示例方案運行
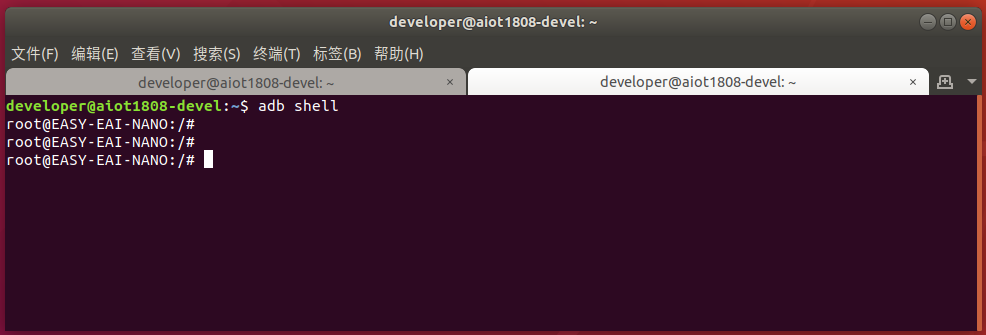
通過按鍵Ctrl+Shift+T創(chuàng)建一個新窗口,執(zhí)行adb shell命令,進入板卡運行環(huán)境。
adb shell
進入板卡后,定位到例程部署的位置,如下所示:
cd /userdata/Solu
運行例程命令如下所示:
./solu-personDetect
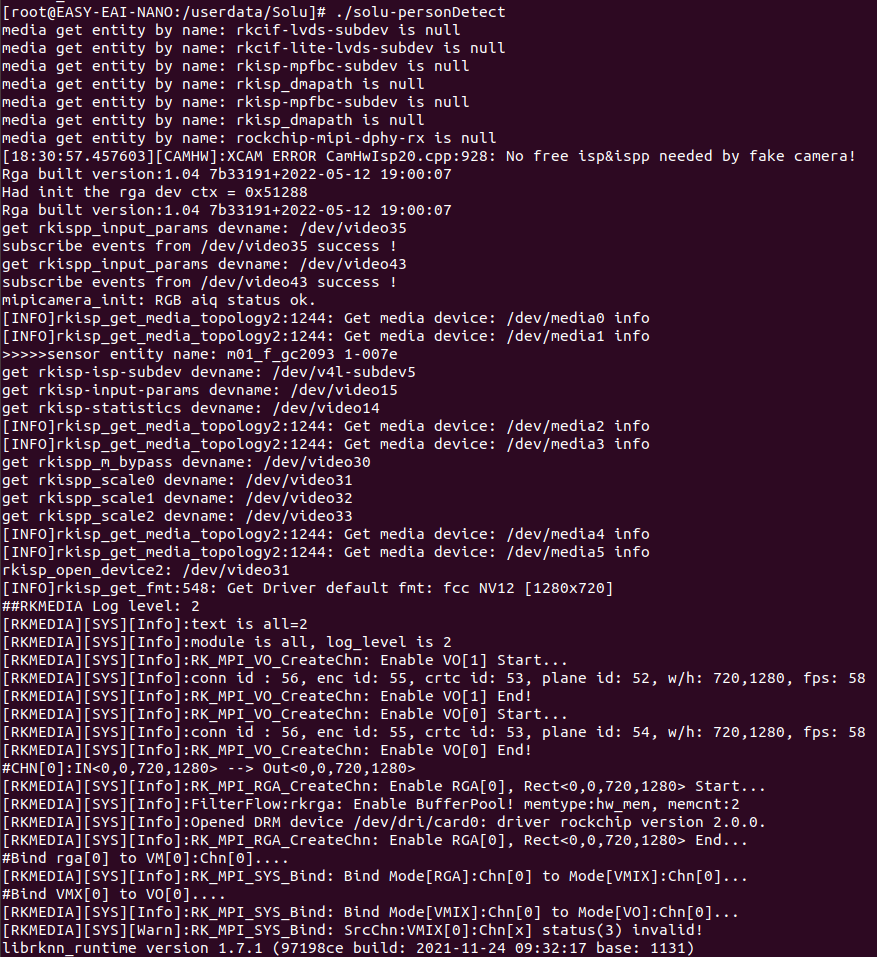
2.6 運行效果
運行打印:
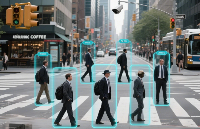
如果攝像頭從畫面中檢測到有人員,后臺會打印出被檢測到的人員數(shù)量:

并且會在圖像上框出每一個人。如下圖所示。

2.7 開機啟動
首先進入板卡環(huán)境,執(zhí)行以下命令,在板卡上創(chuàng)建一個給本例程使用的應(yīng)用目錄:myapp
cd /userdata/apps/ mkdir myapp
然后回到開發(fā)環(huán)境中,通過使用“2.4方案部署”類似的操作方法,把本例程所需要的全部文件,包含:編譯結(jié)果,配置文件,模型等。部署到剛剛新建的myapp目錄中。
最后在板卡上創(chuàng)建一個run.sh腳本來管控用戶所有需要的應(yīng)用即可,《入門指南/應(yīng)用程序開機自啟動》會詳細描述run.sh腳本該如何編寫。
3. 代碼解析
方案主邏輯代碼位于:EASY-EAI-Toolkit-C-Solution/solu-personDetect/src/main.cpp。代碼實現(xiàn)主要通過調(diào)用我司的easyeai-api庫快速實現(xiàn)人員檢測功能,代碼主體分為主線程和算法分析子線程。
3.1 組件庫組成
要實現(xiàn)人員檢測功能,需要使用到easyeai-api庫的以下組件,如下所示。
模組信息如下所示。
| 組件 | 頭文件以及庫路徑 | 描述 |
| 系統(tǒng)操作組件 | easyeai-api/common_api/system_opt | 提供線程操作函數(shù) |
| 攝像頭組件 | easyeai-api/peripheral_api/camera | 提供攝像頭操作函數(shù) |
| 顯示屏組件 | easyeai-api/peripheral_api/display | 提供顯示屏操作函數(shù) |
| 人員檢測組件 | easyeai-api/algorithm_api/person_detect | 提供人員檢測操作函數(shù) |
這些組件通過CMakeLists.txt編譯進工程,具體請看后續(xù)章節(jié)。
3.2 邏輯框圖
項目的整體邏輯框圖如下所示。
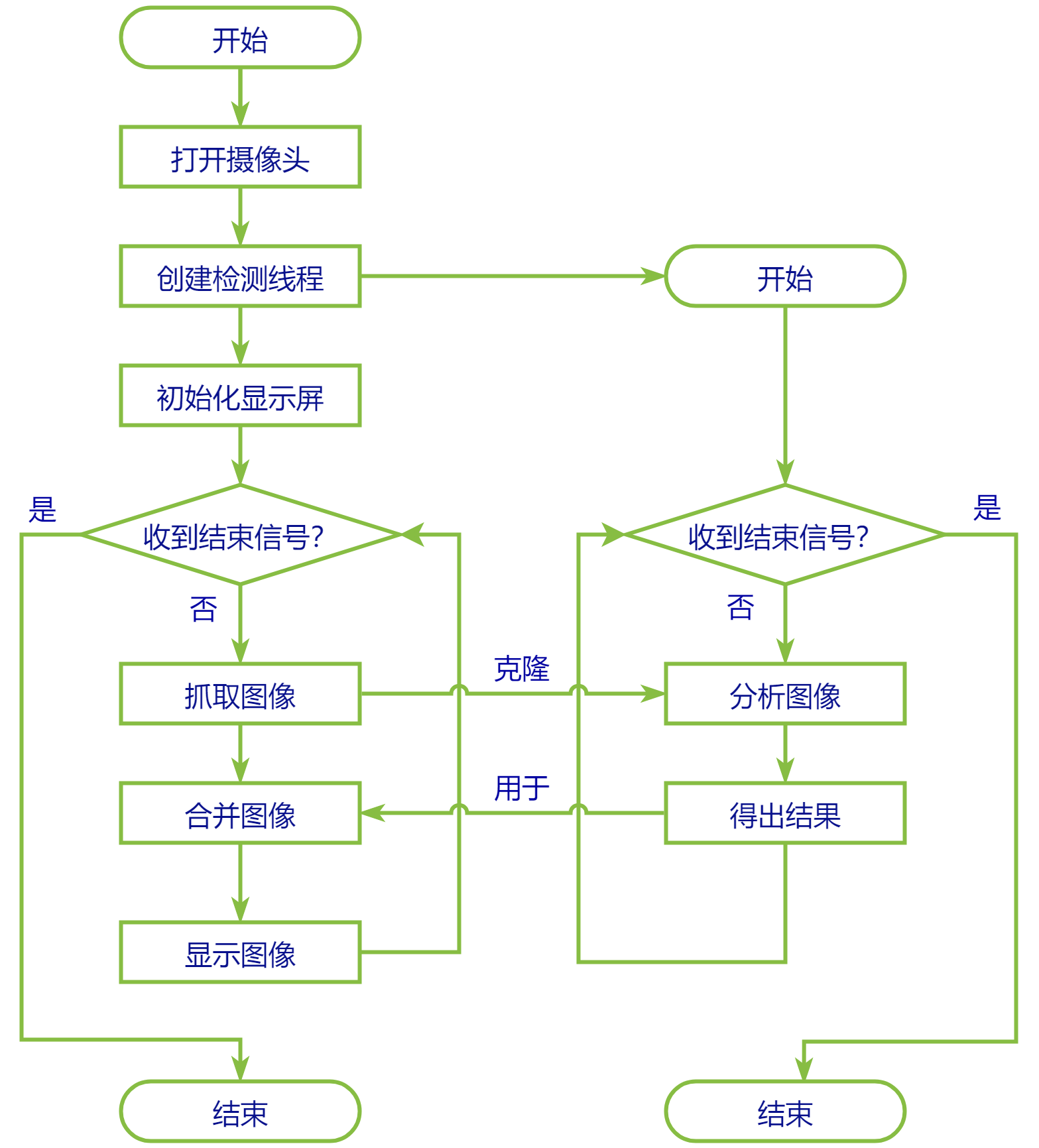
3.3 主線程
主線程處理的業(yè)務(wù)有:
初始化外設(shè);
創(chuàng)建算法分析子線程;
抓圖發(fā)送給到子線程;
抓圖、顯示;
本處附上主要的邏輯功能代碼,其他輔助的、校驗型的代碼先忽略。
組件初始化操作如下,本處調(diào)用RGB攝像頭。
// 1.打開攝像頭 ret = rgbcamera_init(CAMERA_WIDTH, CAMERA_HEIGHT, 90); pbuf = NULL; pbuf = (char *)malloc(IMAGE_SIZE);
創(chuàng)建線程互斥鎖以及線程,如下所示。
// 2.創(chuàng)建識別線程,以及圖像互斥鎖 pthread_mutex_init(&img_lock, NULL); pResult = (Result_t *)malloc(sizeof(Result_t)); memset(pResult, 0, sizeof(Result_t)); if(0 != CreateNormalThread(detect_thread_entry, pResult, &mTid)){ free(pResult); }
初始化顯示屏,如下所示。
// 3.顯示初始化 ret = disp_init(SCREEN_WIDTH, SCREEN_HEIGHT);
抓取圖像,調(diào)用clone操作。
// 4.(取流 + 顯示)循環(huán) pthread_mutex_lock(&img_lock); ret = rgbcamera_getframe(pbuf); algorithm_image = Mat(CAMERA_HEIGHT, CAMERA_WIDTH, CV_8UC3, pbuf); image = algorithm_image.clone(); pthread_mutex_unlock(&img_lock);
調(diào)用顯示圖像,將分析的目標(biāo)位置通過Result標(biāo)記出來。
for (int i = 0; i < Result.person_number; i++)
{
person_detect_result_t *det_result = &(Result.result_group.results[i]);
if( det_result-?>prop < 0.3 ){
continue;
}
/*
printf("%s @ (%d %d %d %d) %fn",
det_result-?>name,
det_result->box.left, det_result->box.top, det_result->box.right, det_result->box.bottom,
det_result->prop);
*/
int x1 = det_result->box.left;
int y1 = det_result->box.top;
int x2 = det_result->box.right;
int y2 = det_result->box.bottom;
char label_text[50];
memset(label_text, 0 , sizeof(label_text));
sprintf(label_text, "%s %0.2f",det_result->name, det_result->prop);
plot_one_box(image, x1, x2, y1, y2, label_text, i%10);
}
disp_commit(image.data, IMAGE_SIZE);
3.4 算法分析子線程
算法分析子線程,主要完成以下操作:
延時監(jiān)測是否圖像緩沖區(qū)是否為空;
不為空時,證明主函數(shù)已發(fā)送圖像數(shù)據(jù)過來,線程執(zhí)行圖像獲取操作;
調(diào)用人員分析函數(shù);
記錄目標(biāo)框的數(shù)據(jù),用于后續(xù)圖像合成操作;
延時監(jiān)測是否有圖像,操作如下所示。
if(algorithm_image.empty()) {
usleep(5);
continue;
}
獲取圖像操作如下所示。
pthread_mutex_lock(&img_lock); image = algorithm_image.clone(); pthread_mutex_unlock(&img_lock);
調(diào)用人員檢測函數(shù),算法得到的目標(biāo)結(jié)果記錄于pResult內(nèi),如下所示。
// 算法分析 ret = person_detect_run(ctx, image, &pResult->result_group);
4. 開發(fā)指南
4.1 示例文件&目錄結(jié)構(gòu)
Solution git倉庫會隨著產(chǎn)品迭代更新,不斷新增解決方案代碼,當(dāng)前截圖只作參考。
4.1.1 Solution git倉庫目錄介紹。
Solution工程構(gòu)成如下所示,由功能組件easyeai-api和各個解決方案構(gòu)成。
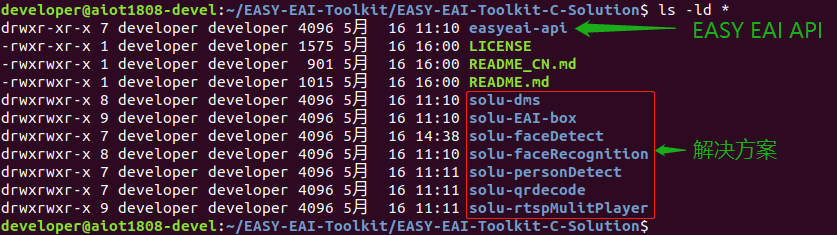
單個“solu-”開頭的目錄即為一個解決方案案例,代碼內(nèi)調(diào)用“EASY EAI-API”來滿足某一實際應(yīng)用場景的需求。
功能組件的描述如下所示,easyeai-api是經(jīng)過高度封裝的易用性組件接口,便于用戶直接調(diào)用板卡資源。
| 功能 | 組件目錄 | 組件子目錄 | 描述 |
| 功能組件 | easyeai-api | algorithm_api | 算法組件 |
| common_api | 通用組件 | ||
| media_api | 多媒體組件 | ||
| netProtocol_api | 網(wǎng)絡(luò)協(xié)議組件 | ||
| peripheral_api | 外設(shè)硬件組件 |
4.1.2 解決方案最基本的目錄構(gòu)成。
每個解決方案就是一個獨立的項目,項目內(nèi)包含部分如下所示,項目使用cmake構(gòu)建自動編譯部署。
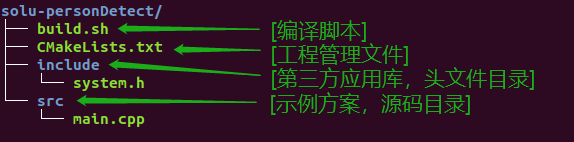
具體介紹如下所示。
| 組成部分 | 描述 |
| build.sh | 編譯腳本,用于管理生成可執(zhí)行文件后的部署準備工作,用戶可自定義shell命令 |
| CMakeLists.txt | 工程管理文件,用于組織整個工程結(jié)構(gòu),指導(dǎo)cmake生成Makefile |
| include | 用于存放第三方應(yīng)用庫、頭文件目錄等 |
| src | 用于存放實現(xiàn)本方案需求的源代碼 |
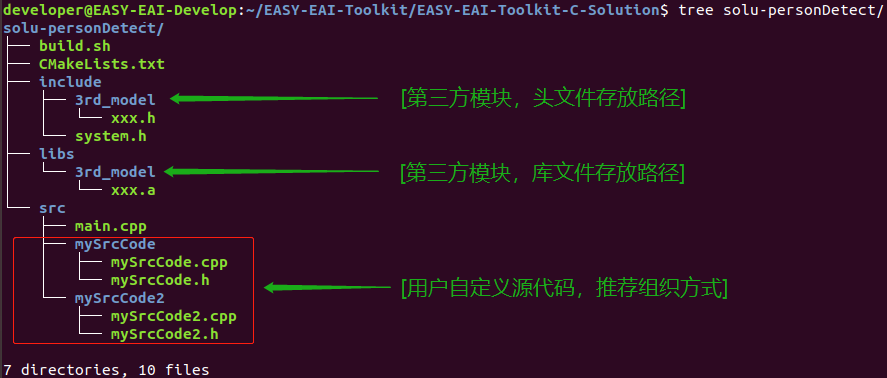
4.1.3 解決方案可拓展的目錄構(gòu)成。
可拓展的目錄是指:開發(fā)過程中增加某些功能模塊,功能代碼。增加模式分為兩種:
增加已編譯的第三方庫,在include、libs目錄內(nèi)添加頭文件和庫文件;
增加用戶自定義的功能模塊,推薦在src目錄內(nèi)增加;
具體情況如下所示,第三方模塊相關(guān)的文件由include/3rd_model/xxx.h、libs/3rd_model/xxx.a。自定義的功能模塊為src/mySrcCode、src/mySrcCode2。
4.2CMakeLists.txt文件解析
4.2.1 編譯環(huán)境配置部分:
第一部分為配置部分,配置部分如下所示。(獲取當(dāng)前方案目錄、配置工具鏈、提取方案名稱):
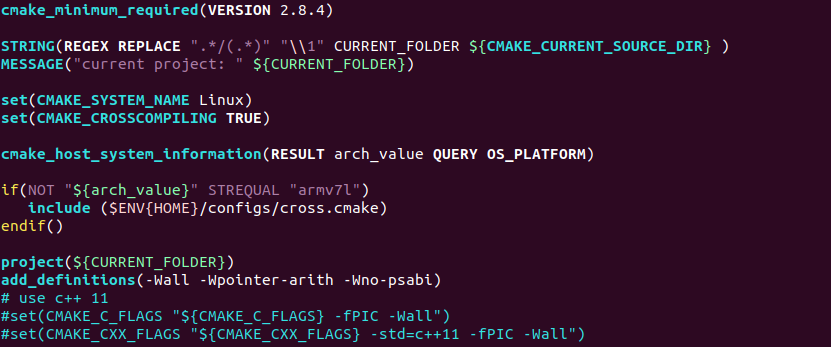
配置信息如下所示。
| 配置項 | 描述 |
| CMake要求版本 | cmake_minimum_required函數(shù)指定,要求的最低版本 |
| CMAKE_SYSTEM_NAME | cmake的系統(tǒng)類型,交叉編譯必須 |
| CMAKE_CROSSCOMPILING | cmake是否啟動交叉編譯 |
| cross.camke | camke_host_system_information獲取平臺信息,發(fā)現(xiàn)不是armv7l就導(dǎo)入當(dāng)前平臺的交叉編譯配置。 |
| project項目名 | 由project函數(shù)指定 |
4.2.2 easyeai-api配置部分
第二部分是引入我司的功能組件庫(針對當(dāng)前方案進行:配置EASY EAI API頭文件目錄、庫文件目錄以及配置庫鏈接參數(shù)):
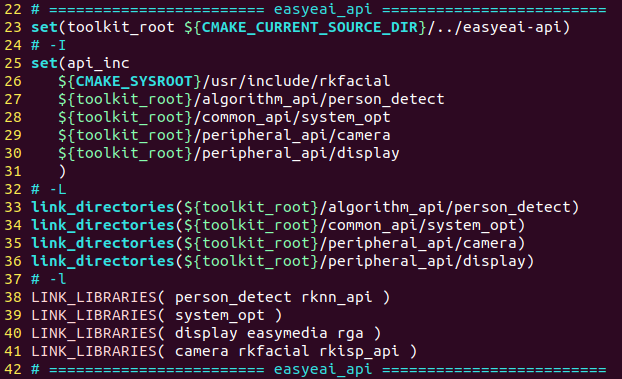
配置信息如下所示。
| 配置項 | 描述 |
| api_inc | 最終通過target_include_directories函數(shù)指定目標(biāo)包含的頭文件路徑 |
| link_directories | 由link_directories函數(shù)指定easyeai-api庫所在路徑 |
| LINK_LIBRARIES | 由LINK_LIBRARIES函數(shù)指定easyeai-api庫文件 |
4.2.3 第三方庫配置部分
第三部分配置第三方的庫(針對當(dāng)前方案進行:配置第三方頭文件目錄、庫文件目錄、配置第三方庫鏈接參數(shù)以及配置源碼目錄):
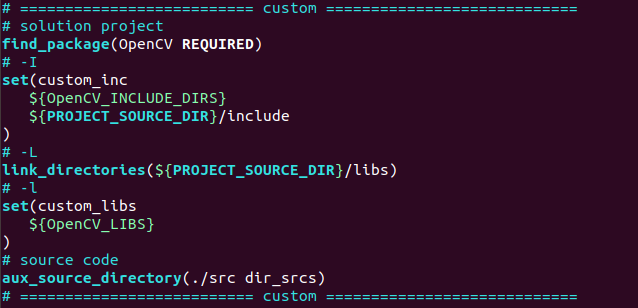
配置信息如下所示。
| 配置項 | 描述 |
| custom_inc | 自定義變量custom_inc,最終通過target_include_directories函數(shù)指定目標(biāo)包含的頭文件路徑,在源碼include目錄下 |
| link_directories | 由link_directories函數(shù)指定第三方庫所在路徑 |
| custom_libs | 自定義變量custom_libs,最終通過target_link_libraries函數(shù)指定目標(biāo)引用的庫鏈接參數(shù) |
| aux_source_directory | 自定義變量dir_srcs,用于添加工程代碼以及自定義的個人代碼 |
例如添加個人庫的目錄組成方式如下所示。
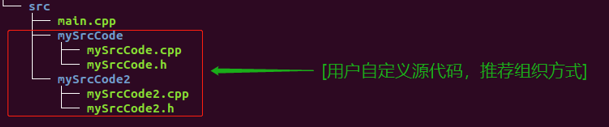
aux_source_directory的修改方式為:
aux_source_directory(./src ./src/mySrcCode ./src/mySrcCode2 dir_srcs)
或
aux_source_directory(./src dir_srcs) aux_source_directory(./src/mySrcCode dir_srcs) aux_source_directory(./src/mySrcCode2 dir_srcs)
4.2.4 本方案配置部分
第四部分配置項目的編譯信息,內(nèi)容如下所示:

配置項如下所示。
| 配置項 | 描述 |
| add_executable |
編譯結(jié)果為${CURRENT_FOLDER}指定,即方案目錄名; 編譯的源文件為${dir_srcs}指定; |
| target_include_directories | 指定頭文件的名字,由${api_inc}與${custom_inc}指定; |
| target_link_libraries | 指定額外的庫,例如opencv的庫等 |
4.3 build.sh編譯腳本:
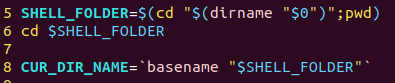
4.3.1 路徑定位部分
第一部分用于提取目錄用于編譯操作,內(nèi)容如下所示:(進入build.sh腳本所在目錄,并且提取當(dāng)前目錄絕對路徑,提取當(dāng)前目錄名稱)
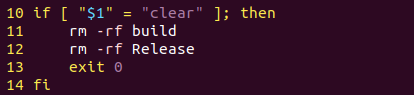
4.2.2 清除編譯部分
第二部分清除操作,清除目錄為build、Release,內(nèi)容如下所示:(執(zhí)行build.sh腳本時,帶入了參數(shù)“clear”,則清空編譯輸出)
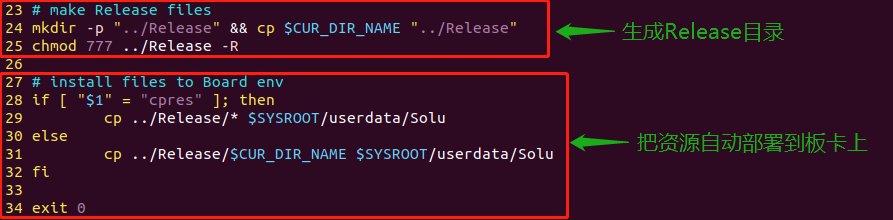
4.3.3 編譯操作
第三部分,編譯直接調(diào)用cmake,內(nèi)容如下所示:(重新編譯,成部署目錄,并把資源自動部署進板卡)

審核編輯 黃宇
-
開發(fā)板
+關(guān)注
關(guān)注
25文章
5589瀏覽量
103170 -
rv1126
+關(guān)注
關(guān)注
0文章
106瀏覽量
3412
發(fā)布評論請先 登錄
RV1126開發(fā)板數(shù)據(jù)手冊
RV1126 實現(xiàn)人臉檢測方案
基于RV1126開發(fā)板實現(xiàn)人臉檢測方案

基于RV1126開發(fā)板實現(xiàn)人員檢測方案
基于RV1126開發(fā)板實現(xiàn)人臉識別方案
基于RV1126開發(fā)板實現(xiàn)駕駛員行為檢測方案
基于RV1126開發(fā)板實現(xiàn)安全帽檢測方案

基于RV1126開發(fā)板實現(xiàn)人臉檢測方案
基于RV1126開發(fā)板實現(xiàn)人臉識別方案
基于RV1126開發(fā)板實現(xiàn)人員檢測方案
基于RV1126開發(fā)板實現(xiàn)人臉檢測方案
基于RV1126開發(fā)板實現(xiàn)人臉檢測方案





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論