 PI+重復控制的有源電力濾波器提高電力諧波控制效果
PI+重復控制的有源電力濾波器提高電力諧波控制效果
電網中諧波的大量存在對電力系統的正常運行提出了挑戰。為了更好地進行諧波處理,有源電力濾波器(APF)的設計與應用成為一大熱點。其設計的原理是通過采集系統中三相負載電流含量,計算其基波電流值,兩者做差即為相應的諧波電流分量[1],然后將此反向分量送給三相電源,完成對電網中諧波的抑制。三相四線制系統中因為不平衡電流的存在,在處理諧波同時,也需要完成對中線電流的補償。
1
系統模型
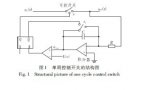
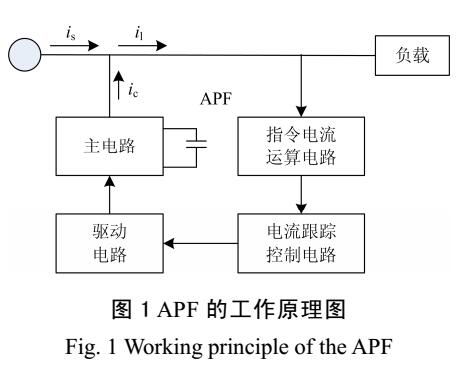
系統結構采用四橋臂模型,在電容分裂式模型基礎上多一個橋臂,用此橋臂實現中線電流的補償,四相橋臂分別對應特定相電流進行跟蹤,發揮補償作用。不同于三橋臂結構需要對直流側電容進行平衡,縮小電容電壓差,而且電路相對復雜,四橋臂結構可直接對中線電流進行補償,電路相對簡單。APF拓撲結構及工作示意圖如圖1所示。
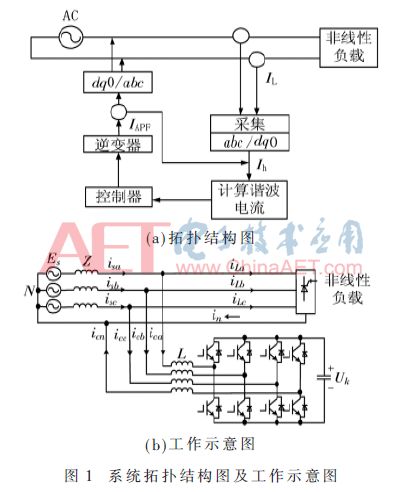
由圖1所示,列基爾霍夫方程:
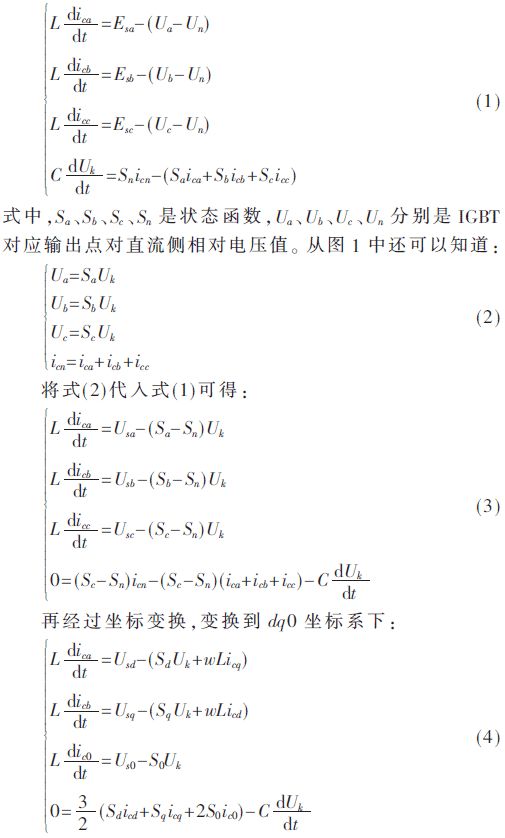
系統采集三相電流 ica、icb、icc和中線電流in,測得電流中所含有的諧波含量,實時傳輸到控制器對系統進行跟蹤產生補償電流量,輸送到對應相進行補償。
2
復合控制算法
系統通過ip-iq法得到補償指令信號,指令信號傳輸到控制器,控制器需完成對諧波的抑制過程。
2.1 復合控制算法構成
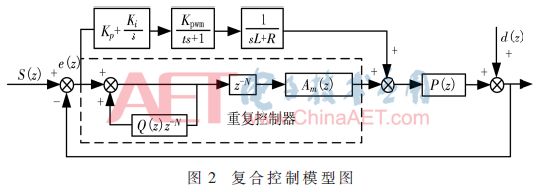
PI控制算法簡單[2-4],跟蹤速度快,但是穩態性能差;重復控制穩態性能好,但是跟蹤滯后一個周期[5],因此在對PI算法和重復算法進行研究的過程中,提出PI與重復控制并聯的模型,其基本模型如圖2所示。
2.1.1 PI控制器
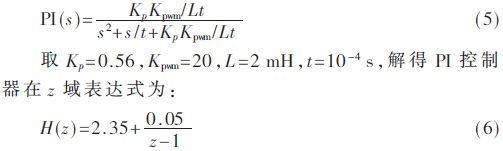
由圖2可知PI部分的閉環傳函為:
2.1.2 重復控制器
重復控制算法的核心是內模原理,內模主要是指對外部信號的一種描述[6],包含指令信號和擾動信號兩部分,使系統在跟蹤指令信號的同時,消除外部擾動影響,這種動態反饋控制系統具有良好的穩態性能。離散模型如下:

其中,z-N是周期延遲環節。
由于系統基波信號是呈周期出現的,而且含有的諧波是基波周期的整數倍,因此認為外部信號是周期性變化的。z-N的作用是將此周期誤差值經過延時作用于下周期的控制量。
另一重要組成部分是補償器。補償器根據所控對象P(z)的具體特性進行參數設置[7],根據上一周期已經采集到的數據與這周期內所測得的誤差,對所控對象的相位和幅值進行補償修正,每周期誤差進行累加直到誤差為零[8],不再存在修正參數時,會保持原值不變。其模型為:
2.2 自適應PI
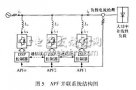
當系統中負載發生變化時,上述并聯控制器能夠在一定時間內重新進行跟蹤,但是效果不理想。針對PI算法的這一缺點,提出神經網絡PI算法構成自適應PI控制器,迅速調節參數以保持整體狀態,其基本結構如圖3所示。
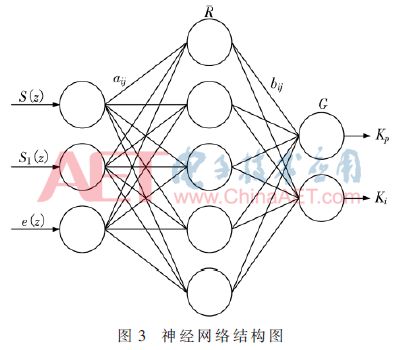
神經網絡由3節點的輸入層(輸入量分別為指令量 S(z)、實際輸出 S1(z)和誤差 e(z))、2節點輸出層(自適應PI參數Kp和Ki)和5節點隱藏層構成。
R函數為隱層輸出函數,采用Sigmoid函數:

G為輸出層函數,由于其輸出值具有非負性,因此采用:

首先選定系統結構,確定每層權值的初始數,選擇相應的學習速率及慣性系數;將輸入值S和S1輸入系統,即可得到Kp和Ki,系統通過權值的學習,調整各層加權參數,實現自適應PI參數的自動調節。
3
仿真及分析
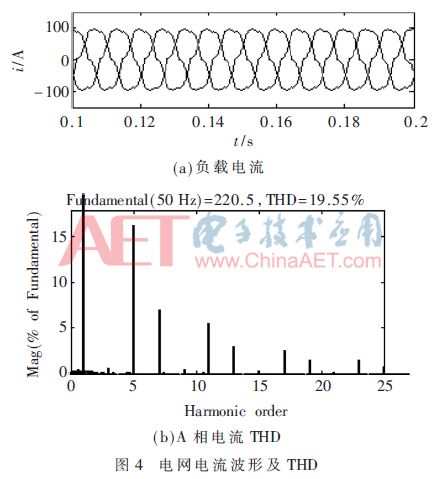
根據系統拓撲結構及基本參數,建立Simulink模型[10]。負載由整流橋和三相串聯RLC電路構成,為了試驗效果,在A相接一個電感負載以產生中線電流。
對系統中負載電流進行測量,其波形如圖4(a)所示。由于諧波分量的存在,波形畸變嚴重,以A相為例,測得THD為19.55%,如圖4(b)所示。
為了檢驗改進后的補償效果,分別對3種算法進行Simulink仿真實驗,設置補償初始時間為0.1 s,圖5為采用PI控制法、重復控制法及并聯控制策略進行諧波補償時系統測得的THD值,圖6(a)為改進后的三相電流波形圖,測得的A相THD值如圖6(b)所示。
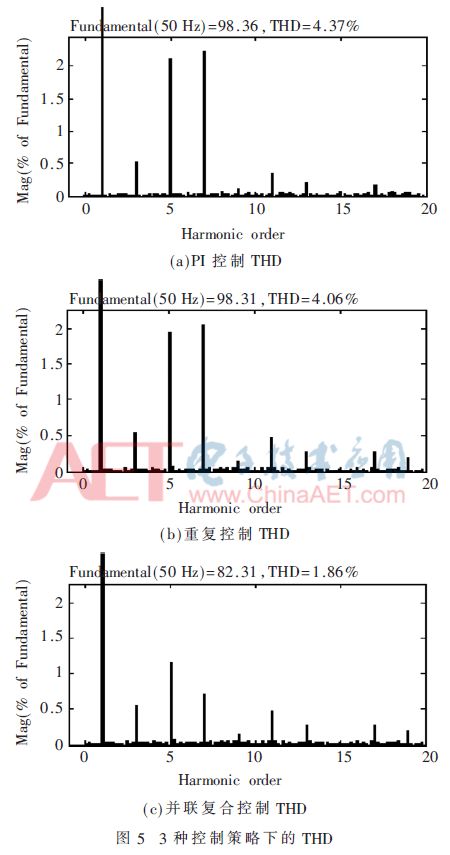
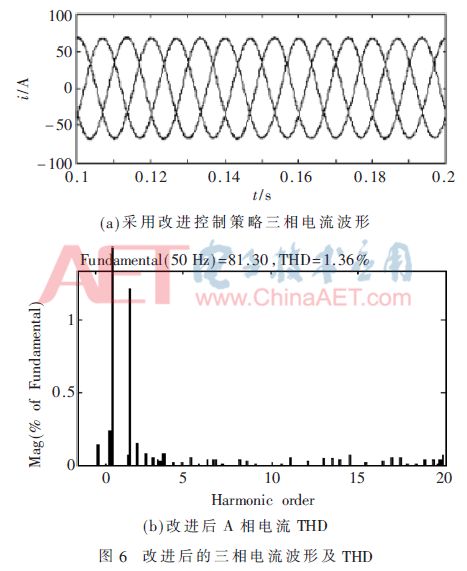
采用PI控制和重復控制對電網電流進行補償時都使波形有趨于正弦波的趨勢,但是不能達到很好的效果,補償后電流波形不是平滑的正弦波。采用PI控制和重復控制時,其THD分別是4.37%和4.06%,采用重復控制雖然相比于PI控制畸變率降低,但效果并不明顯,即兩種控制的效果均不理想。將兩種控制方法并聯后,得到THD為1.86%,在此方法下諧波得到一定的控制。而采用改進的自適應結構后,電流波形基本接近基波波形,三相對稱,其諧波含量降低為1.36%,比簡單并聯時又降低了30%,因此采用改進控制器抑制諧波具有顯著效果。
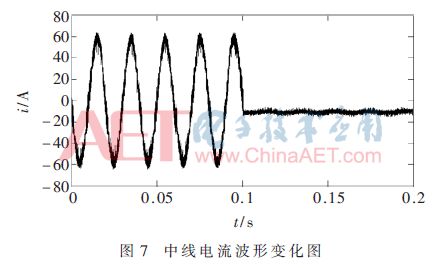
三相不平衡負載使系統出現中線電流,中線電流的存在會導致系統出現發熱現象,嚴重時會燒壞電子器件,令APF無法正常使用。如圖7所示,系統中線電流幅值達到60 A,設置APF在0.1 s進行補償操作,補償后的中線電流可以控制為在一定的范圍內波動,比較平穩,控制效果較好。
為研究APF在系統負載發生突變的情況下補償效果,在0.15 s突加負載,系統迅速完成對各相電流的跟蹤及補償。控制器對指令電流進行跟蹤,0.1 s以前APF輸出電流為零,當APF開始工作以后,迅速跟蹤指令電流,在0.15 s當負載發生突變時,指令電流變大,APF在極短時間內對新的指令電流進行跟蹤,輸出補償電流。圖8為APF電流跟蹤情況,可以發現采用簡單并聯模型對中線電流進行追蹤,其效果不如改進后效果理想。

仿真結果表明,采用復合控制對三相四線制電路進行諧波補償時,其抑制效果明顯,電網電流中諧波含量顯著下降,波形近似正弦波。當系統發生負載突變時,APF在一個周期內迅速跟蹤變化的指令電流,調整輸出補償電流,使電網電流重新達到三相平衡。
4
結論
在低壓配電網中,系統中含有大量諧波成分,阻礙系統的運轉和發展,當負載出現不均衡時,就會出現中線電流,它的存在也會對電網產生影響。本文通過對比傳統PI、重復控制器、簡單并聯控制器和自適應復合控制器的諧波控制效果,發現改進控制器對系統諧波具有更好的控制作用,提高了供電質量,基于復合控制的APF具有較高的應用價值。
-
濾波器
+關注
關注
161文章
7872瀏覽量
179050 -
PI
+關注
關注
12文章
220瀏覽量
112400 -
諧波
+關注
關注
7文章
830瀏覽量
41917 -
APF
+關注
關注
3文章
50瀏覽量
19592
原文標題:【學術論文】重復控制自適應PI控制器在APF中的應用
文章出處:【微信號:ChinaAET,微信公眾號:電子技術應用ChinaAET】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
基于i_p-i_q算法的DSP并聯有源電力濾波器設計
采用雙DSP控制的并聯型有源電力濾波器
如何去實現一種APF有源電力濾波器設計
有源電力濾波器的并聯運行及控制





 工商網監
工商網監
評論