 復合機器人為什么要使用單點糾偏算法?
復合機器人為什么要使用單點糾偏算法?
在智能制造領域,復合機器人憑借“移動+操作+感知”三位一體的能力,已成為柔性產線的核心裝備。然而,復雜工況下的動態誤差累積、機械振動干擾等問題,常導致機器人作業精度驟降。復合機器人為什么要使用單點糾偏算法?其本質是通過精準定位關鍵誤差源,以最小計算量實現實時動態修正,為復雜場景下的穩定性和效率提供底層保障。

一、傳統糾偏之困:全局優化 vs 效率瓶頸
傳統復合機器人多采用全局糾偏算法,需對整機運動軌跡進行實時建模與優化。例如,AGV在磁條導航中若發生偏移,需重新計算全部路徑參數,不僅耗時且易引發超調振蕩510。在電子裝配等高精度場景中,具身智能工業機器人這種“大而全”的糾偏方式難以應對微米級誤差的瞬時修正需求。復合機器人為什么要使用單點糾偏算法?答案在于其通過聚焦關鍵偏差點,以“點穴式”精準干預,兼顧效率與精度。

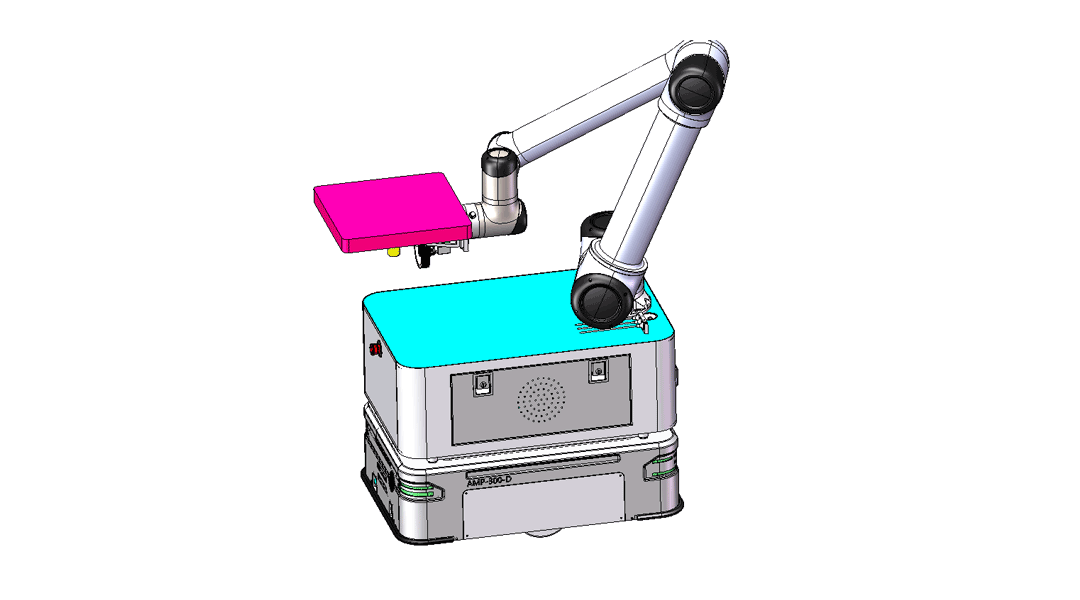
以富唯智能的復合機器人為例,其搭載的單點動態糾偏算法,基于實時采集的激光雷達、3D視覺及六維力傳感器數據,僅針對機械臂末端或移動底盤的瞬時偏移進行快速補償。實驗數據顯示,該算法響應時間低至50ms,糾偏精度可達±0.05mm,較傳統全局算法效率提升3倍以上。
二、富唯智能的革新:單點糾偏+AI預測,重構誤差閉環
富唯智能深諳復合機器人為什么要使用單點糾偏算法的核心邏輯——動態場景下的“精準狙擊”。其技術突破體現在三大維度:
1.誤差預測前置化:通過AI模型提前預判環境擾動(如地面不平、負載突變),在誤差產生前調整控制參數,減少糾偏觸發頻率。 多模態數據融合:集成2D/3D視覺與力控反饋,構建“視覺定位-力覺修正”雙閉環。當視覺受光照干擾時,力傳感器實時檢測裝配阻力,觸發單點糾偏算法動態調整抓取姿態,確保±0.03mm級操作精度。

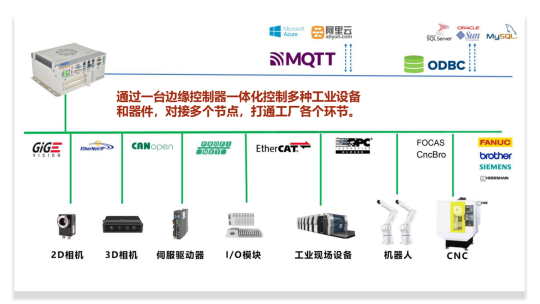
2.輕量化計算架構:采用邊緣計算模塊ForwardControl,將算法計算負載降低70%,支持100Hz高頻糾偏,即使在物流倉爆單期,仍能保持99.9%的任務成功率。
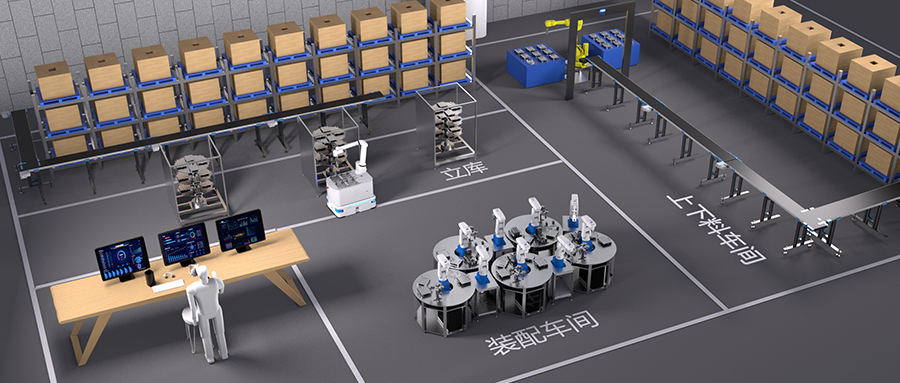
復合機器人為什么要使用單點糾偏算法?其終極目標是構建“自適應智能制造生態”。富唯智能通過模塊化設計,將算法封裝為獨立功能單元,支持企業按需調用。例如,某3C客戶通過“低代碼平臺”自主配置糾偏邏輯,15分鐘完成新產線適配,人力成本降低50%。
審核編輯 黃宇
-
算法
+關注
關注
23文章
4682瀏覽量
94332 -
工業機器人
+關注
關注
91文章
3432瀏覽量
93582
發布評論請先 登錄
相關推薦
復合機器人是通過什么導航方式?
富唯智能最小復合機器人的強大抓取實力?

復合機器人能滿足多少毫米級的定位?
復合機器人抓取精度的影響因素及提升策略
復合機器人生產廠家:驅動智能制造的核心力量

軟通天樞發布軟通天匯復合機器人系列產品
多功能復合機器人設計方案

復合機器人正逐漸在倉儲物流領域發揮重要作用
復合機器人在3c電子行業的應用

復合機器人:精密制造中的“微米級”精準助手

復合機器人:開啟智能倉儲新篇章

復合機器人倉庫搬運方案

復合機器人在CNC行業的成功案例:革新生產方式的里程碑
復合機器人:重塑柔性生產的未來





 工商網監
工商網監
評論