") 一文看懂步進(jìn)電機(jī)整步半步什么意思
一文看懂步進(jìn)電機(jī)整步半步什么意思

步進(jìn)電機(jī)驅(qū)動器是什么
步進(jìn)電機(jī)驅(qū)動器是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。當(dāng)步進(jìn)驅(qū)動器接收到一個(gè)脈沖信號,它就驅(qū)動步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動一個(gè)固定的角度(稱為“步距角”),它的旋轉(zhuǎn)是以固定的角度一步一步運(yùn)行的。可以通過控制脈沖個(gè)數(shù)來控制角位移量,從而達(dá)到準(zhǔn)確定位的目的;同時(shí)可以通過控制脈沖頻率來控制電機(jī)轉(zhuǎn)動的速度和加速度,從而達(dá)到調(diào)速和定位的目的。
步進(jìn)電動機(jī)和步進(jìn)電動機(jī)驅(qū)動器構(gòu)成步進(jìn)電機(jī)驅(qū)動系統(tǒng)。步進(jìn)電動機(jī)驅(qū)動系統(tǒng)的性能,不但取決于步進(jìn)電動機(jī)自身的性能,也取決于步進(jìn)電動機(jī)驅(qū)動器的優(yōu)劣。對步進(jìn)電動機(jī)驅(qū)動器的研究幾乎是與步進(jìn)電動機(jī)的研究同步進(jìn)行的。
步進(jìn)電機(jī)驅(qū)動器的原理
步進(jìn)電機(jī)驅(qū)動器的原理,采用單極性直流電源供電。只要對步進(jìn)電機(jī)的各相繞組按合適的時(shí)序通電,就能使步進(jìn)電機(jī)步進(jìn)轉(zhuǎn)動。圖1是該四相反應(yīng)式步進(jìn)電機(jī)工作原理示意圖。
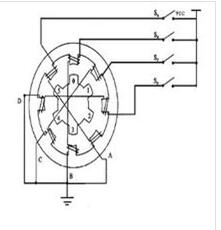
四相步進(jìn)電機(jī)步進(jìn)示意圖 開始時(shí),開關(guān)SB接通電源,SA、SC、SD斷開,B相磁極和轉(zhuǎn)子0、3號齒對齊,同時(shí),轉(zhuǎn)子的1、4號齒就和C、D相繞組磁極產(chǎn)生錯(cuò)齒,2、5號齒就和D、A相繞組磁極產(chǎn)生錯(cuò)齒。 當(dāng)開關(guān)SC接通電源,SB、SA、SD斷開時(shí),由于C相繞組的磁力線和1、4號齒之間磁力線的作用,使轉(zhuǎn)子轉(zhuǎn)動,1、4號齒和C相繞組的磁極對齊。而0、3號齒和A、B相繞組產(chǎn)生錯(cuò)齒,2、5號齒就和A、D相繞組磁極產(chǎn)生錯(cuò)齒。依次類推,A、B、C、D四相繞組輪流供電,則轉(zhuǎn)子會沿著A、B、C、D方向轉(zhuǎn)動。四相步進(jìn)電機(jī)按照通電順序的不同,可分為單四拍、雙四拍、八拍三種工作方式。單四拍與雙四拍的步距角相等,但單四拍的轉(zhuǎn)動力矩小。八拍工作方式的步距角是單四拍與雙四拍的一半,因此,八拍工作方式既可以保持較高的轉(zhuǎn)動力矩又可以提高控制精度。
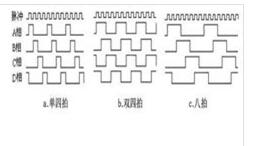
單四拍、雙四拍與八拍工作方式的電源通電時(shí)序與波形分別如圖2.a、b、c所示。驅(qū)動器相當(dāng)于開關(guān)的組合單元。通過上位機(jī)的脈沖信號有順序給電機(jī)相序通電使電機(jī)轉(zhuǎn)動。
步進(jìn)電機(jī)的步數(shù)是什么
步數(shù)/圈==其實(shí)也就是步進(jìn)電機(jī)走一圈所用的步數(shù)。
你看的別人驅(qū)動器細(xì)分 步數(shù)/圈。其實(shí)相對的就是幾細(xì)分。
比如。 200步數(shù)/圈 也就是走一圈需要200步。走1步就是1.8度。
如果是兩相的步進(jìn)電機(jī)的話。這個(gè)200步數(shù)/圈就是無細(xì)分。走的是一個(gè)整步。
因?yàn)?.8度角是兩相步進(jìn)電機(jī)的基本步距角度。
如果調(diào)到.2000步數(shù)/圈 也就是走一圈需要2000步。走1步就是0.18度。
因?yàn)閮上嗖竭M(jìn)電機(jī)的基本步距角是1.8度。而現(xiàn)在走1步是0.18度。
也就是 1.8/0.18=10 這個(gè)10就是10細(xì)分。
當(dāng)你調(diào)到2000步數(shù)/圈就是相當(dāng)與調(diào)到了10細(xì)分。
步進(jìn)電機(jī)驅(qū)動器的模式
步進(jìn)電機(jī)驅(qū)動器有三種基本的步進(jìn)電機(jī)驅(qū)動模式:整步、半步、細(xì)分。其主要區(qū)別在于電機(jī)線圈電流的控制精度(即激磁方式)。
1、整步驅(qū)動
在整步運(yùn)行中,同一種步進(jìn)電機(jī)既可配整/半步驅(qū)動器也可配細(xì)分驅(qū)動器,但運(yùn)行效果不同。步進(jìn)電機(jī)驅(qū)動器按脈沖/方向指令對兩相步進(jìn)電機(jī)的兩個(gè)線圈循環(huán)激磁(即將線圈充電設(shè)定電流),這種驅(qū)動方式的每個(gè)脈沖將使電機(jī)移動一個(gè)基本步距角,即1.80度 (標(biāo)準(zhǔn)兩相電機(jī)的一圈共有200個(gè)步距角)。
2、半步驅(qū)動
在單相激磁時(shí),電機(jī)轉(zhuǎn)軸停至整步位置上,驅(qū)動器收到下一脈沖后,如給另一相激磁且保持原來相繼處在激磁狀態(tài),則電機(jī)轉(zhuǎn)軸將移動半個(gè)步距角,停在相鄰兩個(gè)整步位置的中間。如此循環(huán)地對兩相線圈進(jìn)行單相然后雙相激磁步進(jìn)電機(jī)將以每個(gè)脈沖0.90度的半步方式轉(zhuǎn)動。山社電機(jī)供應(yīng)的所有的整/半步驅(qū)動器都可以執(zhí)行整步和半步驅(qū)動,由驅(qū)動器撥碼開關(guān)的撥位進(jìn)行選擇。和整步方式相比,半步方式具有精度高一倍和低速運(yùn)行時(shí)振動較小的優(yōu)點(diǎn),所以實(shí)際使用整/半步驅(qū)動器時(shí)一般選用半步模式。
3、細(xì)分驅(qū)動
細(xì)分驅(qū)動模式具有低速振動極小和定位精度高兩大優(yōu)點(diǎn)。對于有時(shí)需要低速運(yùn)行(即電機(jī)轉(zhuǎn)軸有時(shí)工作在60rpm以下)或定位精度要求小于0.90度的步進(jìn)應(yīng)用中,細(xì)分型步進(jìn)電機(jī)驅(qū)動器獲得廣泛應(yīng)用。其基本原理是對電機(jī)的兩個(gè)線圈分別按正弦和余弦形的臺階進(jìn)行精密電流控制,從而使得一個(gè)步距角的距離分成若干個(gè)細(xì)分步完成。例如十六細(xì)分的驅(qū)動方式可使每圈200標(biāo)準(zhǔn)步的步進(jìn)電機(jī)達(dá)到每圈200*16=3200步的運(yùn)行精度(即0.1125°)。
總的來說:在整步運(yùn)行狀態(tài)下,每輸入一個(gè)脈沖,電機(jī)軸的角位移是一個(gè)步矩角,在半步運(yùn)行狀態(tài)下,每輸入一個(gè)脈沖,電機(jī)軸的角位移是半個(gè)步矩角。步進(jìn)電機(jī)最好不使用整步狀態(tài),整步狀態(tài)時(shí)振動大。
步進(jìn)電機(jī)驅(qū)動器的型號
F3922、F3722L、F3722、F3722A、F3722M、F368、F3522A、F3522H、F3522、F2611、F268C、F875、F556、F256B、F265、F255、F235B、F245、F223
1、F表示步進(jìn)驅(qū)動器
2、表示相數(shù),2表示兩相,3表示3相
3、5表示電流5安培
4、22表示電壓220V
-
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
152文章
3165瀏覽量
149504
發(fā)布評論請先 登錄
步進(jìn)電機(jī)三種驅(qū)動方案介紹
步進(jìn)電機(jī)相數(shù)和步進(jìn)電機(jī)的基本步距角
如何理解步進(jìn)電機(jī)的電機(jī)固有步距角
步進(jìn)電機(jī)驅(qū)動器三種基本驅(qū)動模式
步進(jìn)電機(jī)中的整步和半步是什么意思
步進(jìn)電機(jī)中的整步與半步
步進(jìn)電機(jī)總結(jié) 資料分享
兩相步進(jìn)電機(jī)和四相步進(jìn)電機(jī)的不同點(diǎn)? 相關(guān)資料分享
使用TM4C123和DRV8833步進(jìn)電機(jī)驅(qū)動器以整步和半步模式驅(qū)動步進(jìn)電機(jī)
A4988步進(jìn)電機(jī)驅(qū)動器是如何工作的?
L298驅(qū)動步進(jìn)電機(jī)
一文解析步進(jìn)電機(jī)三種驅(qū)動方式的優(yōu)缺點(diǎn)
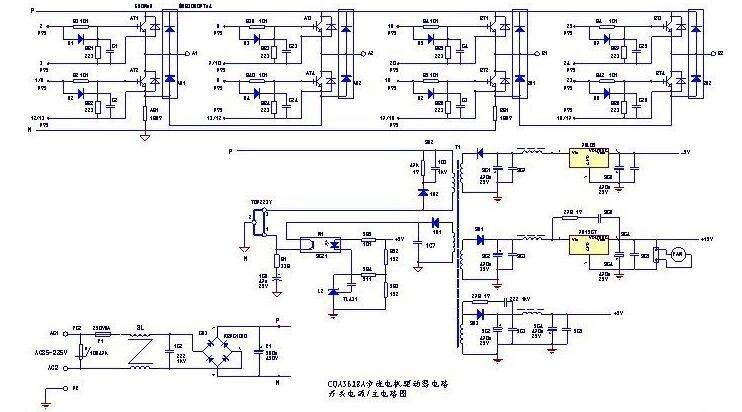
步進(jìn)電機(jī)驅(qū)動器工作模式_步進(jìn)電機(jī)驅(qū)動器電路圖
降低步進(jìn)電機(jī)振動、噪音的解決方法
步進(jìn)電機(jī)整步、半步、細(xì)分波形理解






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論