 自動駕駛經歷了哪些技術拐點?
自動駕駛經歷了哪些技術拐點?
[首發于智駕最前沿微信公眾號]隨著電動化的普及和市場競爭的加劇,傳統內燃機正逐漸被新能源汽車所取代,隨著智能化發展的不斷演進,智能駕駛技術作為下一階段的核心競爭力,正受到廣泛關注。從最初的輔助駕駛,到如今以AI為核心驅動的自動駕駛系統,各大車企都在不斷加碼研發投入,試圖在未來市場中占據制高點。那自動駕駛發展至今,經歷了哪些技術拐點呢?

自動駕駛系統的發展歷程
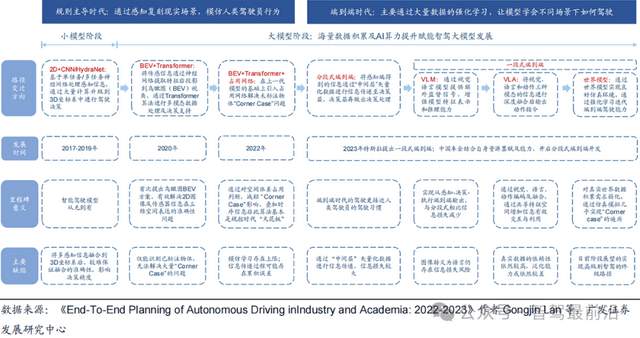
自動駕駛技術的發展是一個從理論探索到逐步成熟的過程。最初,自動駕駛系統主要依賴于傳統的規則驅動方法,通過攝像頭、雷達和激光雷達等傳感器采集環境信息,再通過預設的規則和模型對數據進行處理和解析,模仿人類駕駛員的決策過程。這一時期,多采用基于“2D+CNN”的感知架構,通過卷積神經網絡對攝像頭圖像進行特征提取和場景識別,但此類方法存在著對復雜場景識別能力不足、信息傳遞過程中誤差累積等問題。
自動駕駛從規則主導到端到端的變革
隨著特斯拉等廠商的技術突破,自動駕駛系統逐步邁入了多任務學習和大模型時代。2017年至2019年,特斯拉率先推出了HydraNet多任務學習神經網絡架構,使得同一模型能夠同時處理車道線檢測、行人識別、交通信號燈判斷等多種視覺任務,大幅提升了數據處理效率和實時性。隨后,在2020至2021年間,特斯拉進一步引入“BEV+Transformer”的架構,將攝像頭獲取的二維圖像轉換為鳥瞰圖(BEV),實現了多傳感器數據在三維空間中的統一表達,從而解決了傳統2D圖像在距離估計和遮擋問題上的不足。緊接著,2022年占用網絡(Occupancy Network)的出現,通過直接在3D空間中判斷體素是否被占用,有效降低了對標注數據的依賴,并增強了系統對“corner case”情況的識別能力。
特斯拉端到端架構示意圖
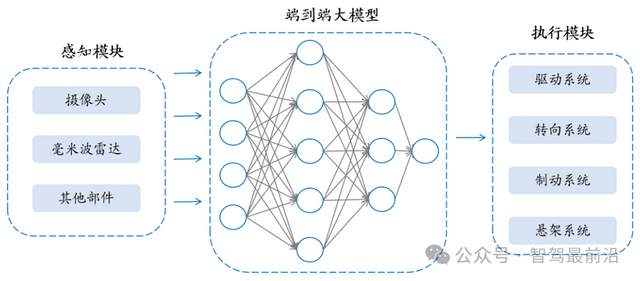
當前,隨著大模型和強化學習技術的發展,端到端一體化架構正逐步成為業界關注的焦點。端到端模型通過將感知、規劃、決策和控制等環節整合為一個統一的神經網絡系統,能夠直接從傳感器數據輸出具體的控制指令,從而減少了中間環節的信息損失和延遲。不過,這種方法在可解釋性上仍存在一定挑戰,因其內部決策過程較為“黑箱”,使得故障診斷和系統優化變得更為復雜。

算法架構:從規控到端到端的轉變
自動駕駛系統的核心在于算法,如何從傳統的規則控制(規控)架構演進到端到端模型,是當前技術變革的重要課題。在規控時代,系統主要依賴于人工設計的規則,通過對傳感器數據的預處理、特征提取和手工設定的邏輯規則實現環境解析。雖然這種方法在早期能夠較好地模仿人類駕駛行為,但其局限性在于對復雜場景的適應能力不足,以及在多傳感器信息融合過程中可能產生的信息傳遞誤差。
隨著深度學習技術的迅速發展,基于數據驅動的端到端模型逐漸嶄露頭角。以特斯拉為代表的企業,通過大規模數據采集和海量算力支撐,開發出了一體化神經網絡,將傳統上各個獨立的模塊(感知、決策、控制)通過聯合訓練方式整合起來。這種端到端模型可以直接從原始傳感器數據中提取特征,并通過神經網絡進行場景理解與決策,從而大幅降低了信息在各模塊間傳遞時的損失。盡管端到端模型在簡化系統結構和提升反應速度方面具有明顯優勢,但其“黑箱”特性也使得系統在安全性和故障分析上面臨更大挑戰,因此,業內開始探索分段式端到端方案,即在保持部分模塊獨立性的同時,通過神經網絡連接實現數據和決策信息的高效傳遞。
這一轉變的關鍵技術在于如何實現多傳感器數據的高效融合和場景重構。如通過BEV技術將攝像頭捕捉的二維圖像轉換為鳥瞰圖,不僅可以消除不同傳感器之間的視角差異,還能在更高維度上統一表達環境信息;而Transformer模型則通過自注意力機制實現多模態信息的深度融合,使得系統在面對復雜動態場景時能夠更準確地捕捉關鍵特征。對于特殊情況的處理,占用網絡技術通過直接測量空間內物體體積的占用狀態,實現了對未標注物體的識別和處理,進一步增強了系統的魯棒性。
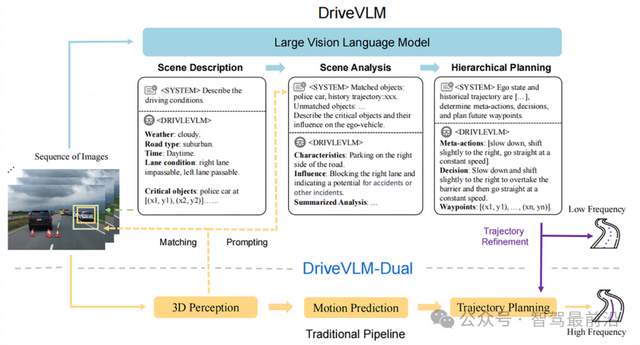
端到端大模型雖然已經取得了顯著突破,但在實際應用中仍存在一些亟待解決的問題。為了進一步提升系統在復雜場景下的表現,業內開始關注視覺語言模型(VLM)和視覺-語言-動作模型(VLA)的融合應用。
VLM通過將視覺信息與語言信息進行深度融合,能夠為系統提供額外的語義監督信號。例如,在道路標識、交通指示等信息的識別中,VLM不僅能夠解析圖像信息,還能結合自然語言描述,實現對復雜場景中交通規則的準確識別和理解。VLA則進一步在此基礎上引入動作編碼器,通過融合歷史駕駛數據,實現從感知到決策再到執行的閉環優化。這樣的多模態融合架構不僅能有效降低系統內部的傳遞延遲,還能大幅提升在極端駕駛場景下的決策準確性和響應速度。
VLM端到端模型技術示意圖
隨著大模型技術的發展,世界模型(World Model)也逐漸進入自動駕駛的研究視野。世界模型不僅能夠對當前環境進行靜態重構,更能夠對未來一段時間內場景的演變進行預測,從而為駕駛決策提供更為前瞻性的指導。通過對海量真實駕駛場景視頻的學習,世界模型可以在一定程度上實現對“corner case”場景的遍歷,降低實際道路測試的風險和成本。技術從業者在研究過程中,應密切關注這些新興模型的發展動態,結合實際場景需求,不斷探索更為高效的多模態融合方案和實時反饋機制。

多模態信息融合與數據閉環的重要性
多模態信息融合是實現自動駕駛系統全面感知的核心技術。傳統方法中,各傳感器如攝像頭、雷達和激光雷達采集的信息往往存在數據格式、分辨率和時延上的差異。如何將這些異構數據進行有效整合,形成一個準確、統一的環境模型,是提高自動駕駛系統安全性和決策精度的關鍵。
以BEV技術為例,將二維圖像投影到三維空間中不僅解決了信息表達上的局限,還為后續算法提供了更具全局視野的輸入數據。而Transformer架構則通過自注意力機制,使得不同來源的信息能夠在一個共享的特征空間中進行互補和優化。在此基礎上,占用網絡進一步引入了對空間占用情況的量化分析,通過劃分體素,實現了對復雜環境中各類障礙物狀態的精準判斷。
數據閉環機制在自動駕駛系統中同樣至關重要。閉環數據采集和反饋系統可以使得算法在實際道路行駛中不斷學習和優化,通過真實駕駛數據和仿真數據的迭代訓練,系統能夠逐步覆蓋各類長尾場景和特殊情況。這種不斷迭代的過程不僅提高了系統對異常情況的容錯能力,也為大模型的持續優化提供了堅實的數據支撐。對于技術從業者來說,構建一個完善的數據采集、處理和反饋閉環體系,是確保系統持續穩定運行的重要保障。

市場反應或給車企帶來方向參考
消費者對自動駕駛系統的接受程度其實可以通過“付費意愿”與“使用率”來衡量。智駕技術的設計初衷是為了讓消費者減少駕駛疲勞感,但站在市場的角度,智駕技術的商業化也證明了消費者對該技術的追捧。
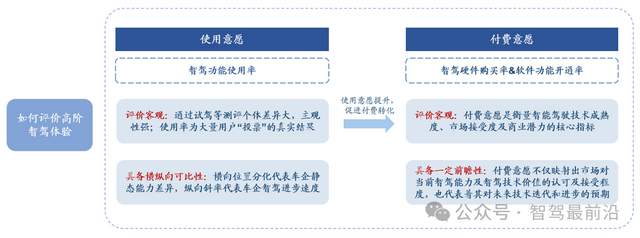
智能駕駛功能的兩大評價指標
付費意愿通常反映在高階智駕版車型的選購率上。當前不少車企采用“硬件標配/選裝+軟件付費”的模式,通過對消費者實際購車數據和交強險數據的統計,觀察智駕版本的銷量占比,以此客觀反映消費者對自動駕駛技術的認可程度。現階段,部分國內車企在車型中智駕版的占比已經達到了較高水平,表明在技術不斷進步的推動下,消費者對于具備高階自動駕駛能力的產品具有較高的支付意愿。
使用率則直接反映了消費者在實際駕駛過程中對自動駕駛功能的依賴和信任。常用的量化指標是每百公里駕駛中激活智駕功能的比例,不同場景下的使用率(如全場景、城市及高速)各具代表意義。全場景使用率反映了系統在各種復雜環境下的普適性和魯棒性;城市場景使用率則對系統在復雜交通環境下的響應能力提出了更高要求;而高速場景使用率則主要考驗系統在較為單一但連續性較高的駕駛環境中的穩定性。技術從業者可以通過不斷追蹤這些關鍵指標,及時調整算法模型和系統參數,確保自動駕駛系統在不同場景下均能達到預期的性能水平。

總結
自動駕駛技術正處于快速變革的關鍵時期。從最初的規則控制到如今端到端大模型的應用,再到多模態信息融合和數據閉環機制的不斷完善,每一步技術突破都為系統的安全性、魯棒性和智能化奠定了堅實基礎。通過對高階智能駕駛體驗拐點的深入分析,我們可以看到,未來自動駕駛技術不僅需要在算法層面不斷提升,更需要在數據采集、處理和反饋機制上形成閉環,為系統持續優化提供不竭動力。同時,通過對付費意愿和使用率等關鍵指標的量化評估,技術從業者能夠更直觀地了解市場需求和系統表現,從而有針對性地進行技術改進和產品迭代。
審核編輯 黃宇
-
傳感器
+關注
關注
2564文章
52706瀏覽量
764635 -
激光雷達
+關注
關注
971文章
4210瀏覽量
192234 -
自動駕駛
+關注
關注
788文章
14242瀏覽量
169908
發布評論請先 登錄

NVIDIA Halos自動駕駛汽車安全系統發布
2024年自動駕駛行業熱點技術盤點
NVIDIA DRIVE技術推動自動駕駛發展
一文聊聊自動駕駛測試技術的挑戰與創新

MEMS技術在自動駕駛汽車中的應用
重塑線控底盤技術:自動駕駛的未來支柱
自動駕駛汽車安全嗎?







 工商網監
工商網監
評論