 Nullmax亮相2025上海車展汽車智能化峰會
Nullmax亮相2025上海車展汽車智能化峰會

日前,2025上海車展汽車智能化峰會的端到端自動駕駛專題論壇上,Nullmax首席科學家成二康博士發表《端到端 - One Model Decoder 架構設計》主題演講,重點講解 Nullmax 在端到端技術領域取得的成果,深度解析 Nullmax 在一段式端到端自動駕駛技術領域的探索與發現,為行業發展提供了新的思路。
本屆中國汽車智能化創新峰會是2025上海車展官方活動之一,也是智一科技連續第四屆在上海車展同期舉辦的線下大會,共吸引近20位智能汽車產業技術產品大咖與青年學者參與。
穩扎穩打:夯實端到端技術根基
演講中,成二康博士提到Nullmax平臺化BEV-AI架構設計,針對自動駕駛感知中的動態障礙物檢測(BEV-AI-OD)、靜態地圖理解(BEV-AI-Map)、車道線檢測(BEV-AI-Lane)、時序信息處理(BEV-AI-Temporal)以及拓撲結構預測(BEV-AI-Topo)等關鍵環節,Nullmax 對 Transformer 中的 Decoder 進行了高效的針對性設計,并成功推動其規模化落地。

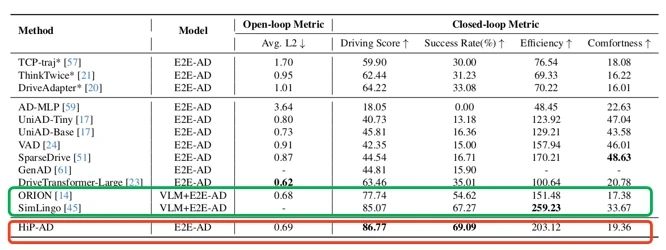
基于在 BEV-AI-Perception 中對 Transformer Decoder 的深入研究和豐富經驗,Nullmax 推出了 HiP-AD 方案。團隊發現,設計一款專為輔助駕駛任務定制的 Decoder,可達到感知規劃端到端的設計目標,而且無需依賴大語言模型的龐大參數量。
事實證明,HiP-AD 方案成效明顯。在Nullmax團隊一系列的測試中,它的表現超越了部分 VLM+E2E 和 VLA 的端到端方案。在城市復雜路況測試中,HiP-AD 方案能夠快速、準確地感知周圍環境信息,包括車輛、行人、交通信號燈等,還能迅速規劃出合理的行駛路徑,面對車輛加塞、行人突然橫穿馬路等復雜情況時,決策既合理又及時,展現出了接近人類優秀駕駛水平的能力。
One Model Decoder 架構:
小參數量,大能量
Nullmax端到端One Model Decoder 架構其參數量僅在幾千萬左右,卻能與業內參數量高達 1B 到 7B 的其他模型方案達到相同的優異效果。這一架構在硬件適配性上表現尤為卓越,無論是中高算力芯片平臺,還是高算力芯片平臺,它都能游刃有余地發揮作用。
目前,Nullmax基于Decoder-only的一段式端到端技術架構,在架構設計和工程化落地方面均取得了不錯進展。Nullmax已經成功實現復雜場景下的端到端城市輔助駕駛功能,而基于語言模型大參數量的 VLA 端到端方案也即將實現量產,為用戶帶來更加智能、便捷的駕駛體驗。
此外,為了給端到端設計提供源源不斷的動力,Nullmax 推出了自主成長數據平臺。該平臺依托 BEV-AI-AutoGT 和虛擬數據生成技術,不斷強化基礎設施建設。BEV-AI-AutoGT 技術實現了自動化的真值標注,相比傳統人工標注,效率和準確性大幅提升。大量高質量標注數據為模型訓練提供了充足 “養分”,加速了模型的優化進程。虛擬數據生成技術則在虛擬環境中模擬各種極端和罕見的交通場景,生成豐富多樣的訓練數據,有效彌補了真實數據的不足,顯著增強了模型的泛化能力和魯棒性。
結語
從平臺化 BEV-AI 架構的搭建,到一段式端到端技術的突破,Nullmax 不僅在前沿自動駕駛技術上獨辟蹊徑,更展現出將創新成果高效轉化為實際應用的硬核實力。
如今,一段式端到端技術架構即將實現工程化落地,標志著 Nullmax 在自動駕駛領域的探索將邁向新高度。未來,Nullmax 還計劃陸續進行技術開源,以開放共享的姿態,為行業發展注入新動能,推動自動駕駛技術邁向更廣闊的未來。
-
輔助駕駛
+關注
關注
1文章
272瀏覽量
15414 -
智能汽車
+關注
關注
30文章
3070瀏覽量
108291 -
自動駕駛
+關注
關注
788文章
14265瀏覽量
170161
原文標題:上海車展演講分享|Nullmax一段式端到端架構設計新思路
文章出處:【微信號:Nullmax,微信公眾號:Nullmax紐勱】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄





 工商網監
工商網監
評論