 能夠精準定位的樹莓派機器人!
能夠精準定位的樹莓派機器人!

我為我的自制機器人 Big Rob(同樣由樹莓派驅動)配備了基于樹莓派的精準 GPS 導航系統。

本項目所用組件
硬件組件
NV08C-CSM x 1
NV08C-CSM 是一款集成式衛星導航接收器
樹莓派 Sense HATx 1
導航需要用到 Sense HAT 擴展板。
樹莓派 3 Model Bx 1
此項目中,我使用了三個樹莓派模塊。
項目背景
項目介紹
我為樹莓派機器人項目搭建了一套差分 GPS 系統,并采用 RTK 庫實現精準導航。該系統需要配備一個基站和一個移動單元,其中移動單元被集成到了我自制的機器人 Big Rob 中。我的博客詳細介紹了包含移動單元、基站、兩個樹莓派以及 RTK 庫的這套系統是如何運作的。
RTK 解決方案
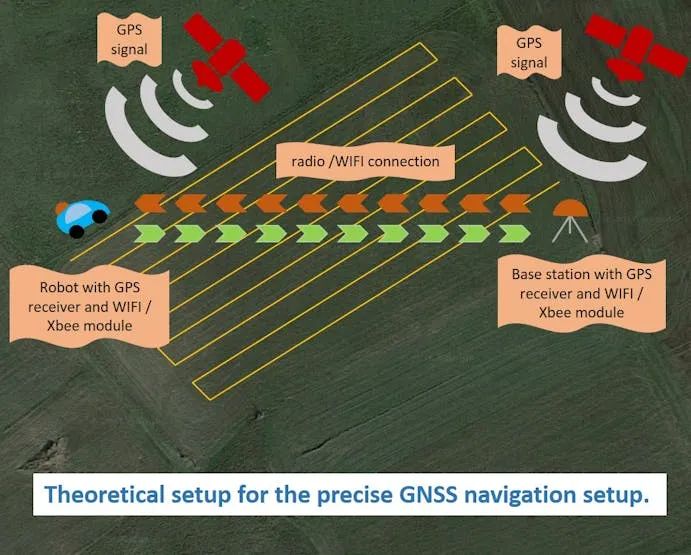
下圖展示了我的 RTK 解決方案的理論架構。
圖中左側是搭載移動單元的機器人汽車,右側是基站。機器人和基站通過通信來計算各自精準的位置。我所購買的 GPS 天線能夠同時接收美國 GPS 信號和俄羅斯 GLONASS 信號作為原始數據流。
基站
我將基站安裝到了一個防水且價格低廉的午餐盒中,這個午餐盒能輕松容納樹莓派、移動電源和 GPS 接收器。該午餐盒價格實惠且易于加工。由于整套系統是為戶外操作設計的,所以盒子必須具備防水功能。

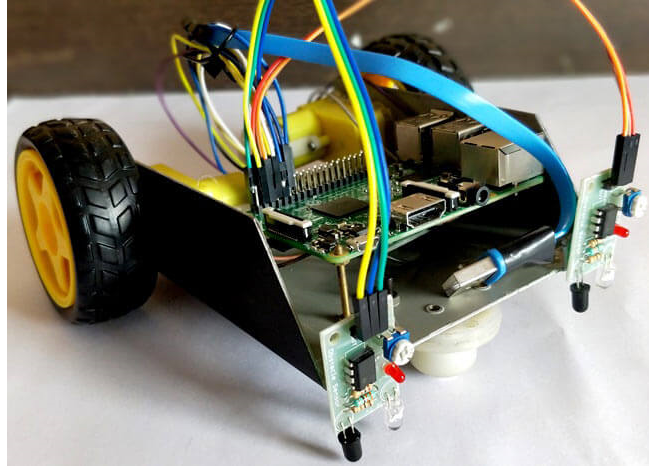
下圖展示了一臺樹莓派,其頂部安裝了一個 GPS 接收器模塊。根據 RTK 庫的配置,這臺樹莓派既可以作為基站,也可以作為移動單元。該 GPS 接收器是我從一位奧地利開發者那里購得的 RasPiGNSS Aldebaran 模塊。
系統搭建
我的博客詳細介紹了這套系統的搭建方式,同時我也發布了關于 RTK 庫配置的詳細說明。雖然搭建過程有些復雜,但我認為按照我的指南,再結合一些 Linux 操作經驗,是完全可以實現的。
我撰寫了七篇文章,介紹如何搭建用于精準 GNSS 定位的差分 GPS 解決方案。該方案使用兩個樹莓派,它們通過 WIFI 或 XBee 模塊進行通信。
入門文章鏈接如下,它將為您介紹基礎知識:《使用樹莓派和 RTKLIB 實現精準 GPS GNSS 定位——入門篇》。
下一篇文章將介紹系統的理論架構:《使用樹莓派和 RTKLIB 實現精準 GPS GNSS 定位——理論架構篇》。
對于這套系統而言,天線至關重要。配置良好的天線能讓您快速獲得精準的 GPS 定位。《使用樹莓派和 RTKLIB 實現精準 GPS GNSS 定位——GPS 天線配置篇》將為您介紹相關內容。
在完成所有硬件相關描述后,接下來的文章將介紹如何安裝所需的所有軟件。我使用的是常規的 Raspbian 鏡像,并安裝了所有附加軟件包。
《使用樹莓派和 RTKLIB 實現精準 GPS GNSS 定位——軟件安裝篇》將為您介紹相關內容。
軟件安裝后的步驟
安裝 RTK 庫等軟件后,您需要配置基站。接下來的章節將為您介紹具體操作:《使用樹莓派和 RTKLIB 實現精準 GPS GNSS 定位——RTKLIB 基站配置篇》。
要獲得精準的 NMEA GPS 坐標流,您還需要在機器人中設置移動單元。接下來的文章將介紹如何設置移動單元并將其與基站連接:《使用樹莓派和 RTKLIB 實現精準 GPS GNSS 定位——RTKLIB 移動單元配置篇》。
WIFI 信號適用于短距離傳輸,因此我購買了 XBee pro 模塊來連接基站和機器人。接下來的指南將為您介紹如何通過 XBee 模塊將 GPS 數據從基站傳輸到機器人:《使用樹莓派和 RTKLIB 實現精準 GPS GNSS 定位——XBee 串行數據傳輸篇》。
當前進展
目前,我正在開發我的機器人 Big Rob。Big Rob 是一款由樹莓派驅動的戶外機器人,它本身作為移動單元,能夠實現非常精準的導航。
目前,我還未確定該機器人的具體用途。但有了這套精準的導航系統,我可以將其打造成安防機器人、割草機,或者只是一個用來嚇唬鄰居的機器人。
原文地址:
https://www.hackster.io/ingmar-stapel/raspberry-pi-powered-roboter-with-differential-gps-4ee269
-
機器人
+關注
關注
213文章
29664瀏覽量
212444 -
定位
+關注
關注
5文章
1435瀏覽量
35927 -
樹莓派
+關注
關注
121文章
1988瀏覽量
107302
發布評論請先 登錄
【開源項目】Emo:基于樹莓派 4B DIY 能笑會動的桌面機器人
變形樂高玩具變形和樹莓派一起玩出樂高機器人!
樹莓派打造視頻監控機器人Verybot
有關樹莓派制作機器人平臺的探索
樹莓派語音識別機器人(上)
樹莓派語音識別機器人(下)
10分鐘,DIY一臺樹莓派版TH Robot WiFi視頻小車機器人
【IoT畢業設計】樹莓派開發板+機智云IoT+監測機器人
如何使用樹莓派制作一個巡線機器人






 工商網監
工商網監
評論