 電機:無刷直流電機的原理
電機:無刷直流電機的原理

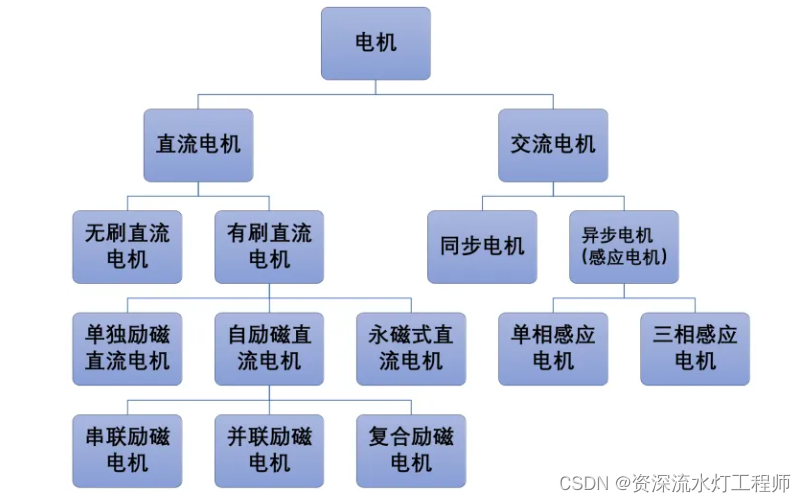
一、什么是無刷直流電機
無刷直流電機,英文名稱 Brushless DC Motor,簡稱BLDC;
無刷直流電機的定子是線圈組,而轉子是磁鐵組,所以不需要用刷子把電流引到定子上,這就是無刷的來歷。
電機運動的原理都是依靠磁場,要么利用磁場的異性相吸,要么利用磁場的同性互斥。
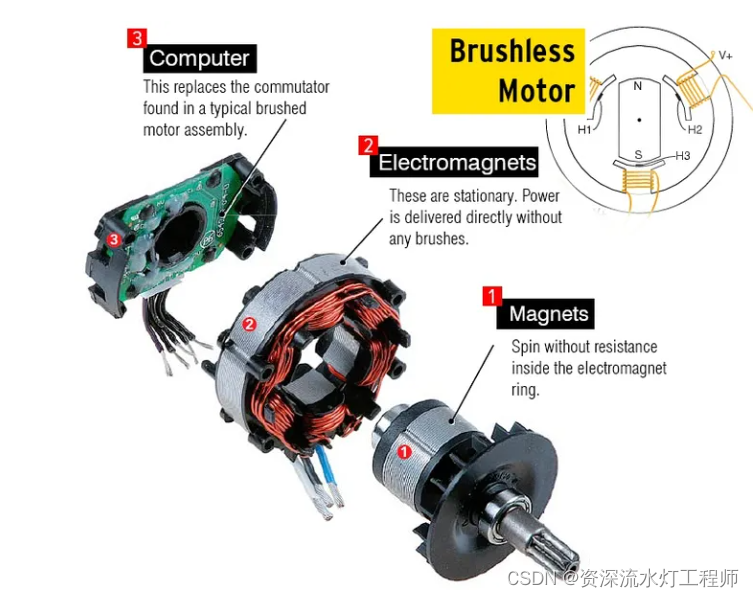
無刷直流電機和有刷直流電機的主要區別在于,無刷電機電流的大小和方向是通過控制器來改變的。通常,定子有三組繞線,和控制電路相連,控制電路通過霍爾傳感器得知轉軸的位置,以此來判斷接下來哪幾相需要通電。控制系統不停地改變通電相,并改變電流大小,來實現不同扭矩的控制。控制器的原理在本文的后面詳細展開。
正因為無刷電機是通過電子換相,所以可靠性更高,運行更安靜,效率也更高。
通常無刷電機可以做得很小,并且擁有高扭矩重量比,當然,因為需要使用傳感器和控制器,成本也隨之升高。
無刷直流電機工作原理動圖
通過無刷直流電機工作原理動圖可以看出,一直在轉的那個玩意就是轉子,也是一塊磁鐵;不動的部分就是定子,定子上繞有線圈,控制器可以控制線圈中電流的大小和方向,從而控制電機的轉矩和轉向。
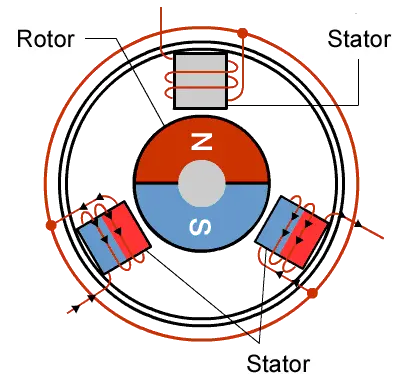
二、無刷直流電機的結構圖
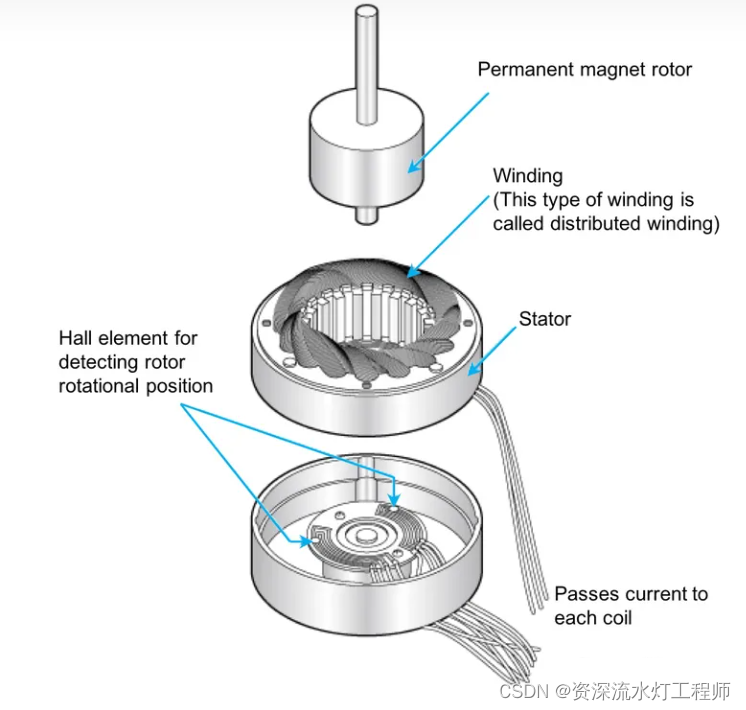
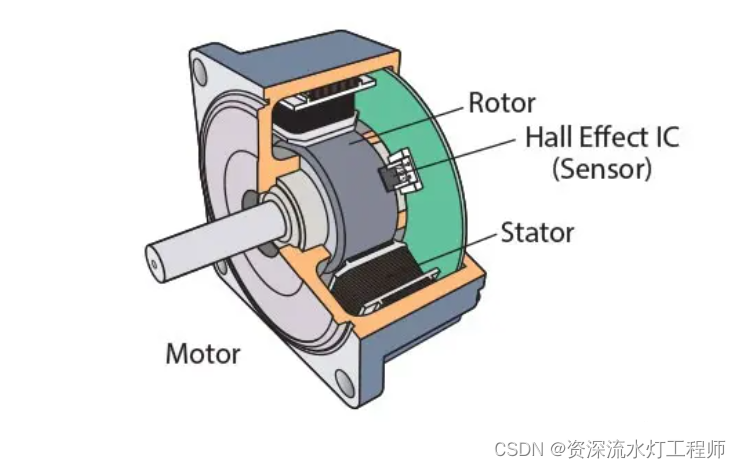
三、無刷直流電機結構分析
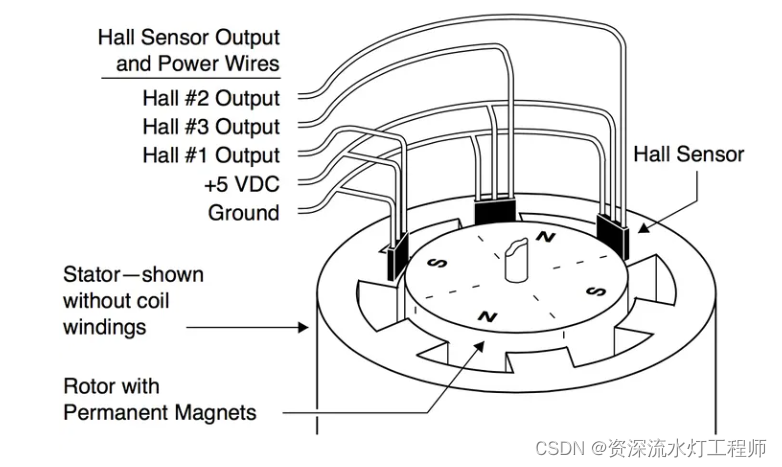
上面兩幅圖就是無刷直流電機簡化的結構示意圖,端面上有三個霍爾傳感器(Hall Sensor),轉子轉動,形成變化的磁場,這個變化的磁場指的是方向發生了變化,而磁場的大小并沒有變化。
霍爾傳感器(可以先去熟悉下霍爾傳感器的原理回更好)感應這個磁場,每個傳感器可以輸出0或者1,所以3個傳感器可以輸出110,101等3位數的不同組合,這些組合代表轉子的不同位置。注意3號霍爾傳感器在1號和2號之間。
轉子是用永磁鐵做成,轉子轉動,3個霍爾傳感器被觸發或者斷開,感應轉子的位置,然后把位置信息告訴控制器,控制器就是根據轉子的位置信息來決定下一步哪些線圈通電,哪些不通電,簡言之就是實現電子換相(Electrical Commutation)。
所以,這里的霍爾傳感器起到溝通的作用,而這一點在有刷直流電機中,是用物理碳刷和機械換相器相互配合才得以實現。
四、霍爾傳感器在直流無刷電機中的作用
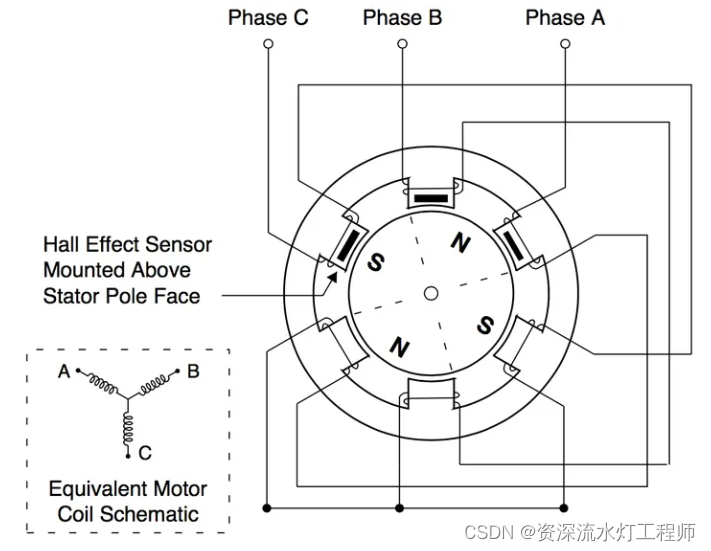
有霍爾傳感器,才實現了無刷,來看看三個霍爾傳感器是如何感應轉子的位置,然后告訴電機換相并實現連續旋轉的。
如上圖所示,一個磁極可以同時覆蓋兩個霍爾傳感器,在圖中所示的時刻,1號霍爾對準S極,而2號和3號霍爾對準N極,如果S極觸發霍爾,N極熄滅霍爾,那么上圖霍爾狀態可以表示100位置。
我們再來看看更細節的情況,如下圖,使電機順時針轉動:霍爾狀態和線圈通電次序的關系,轉子上S極附近有個小黑點,用來表示轉子的轉動方向。
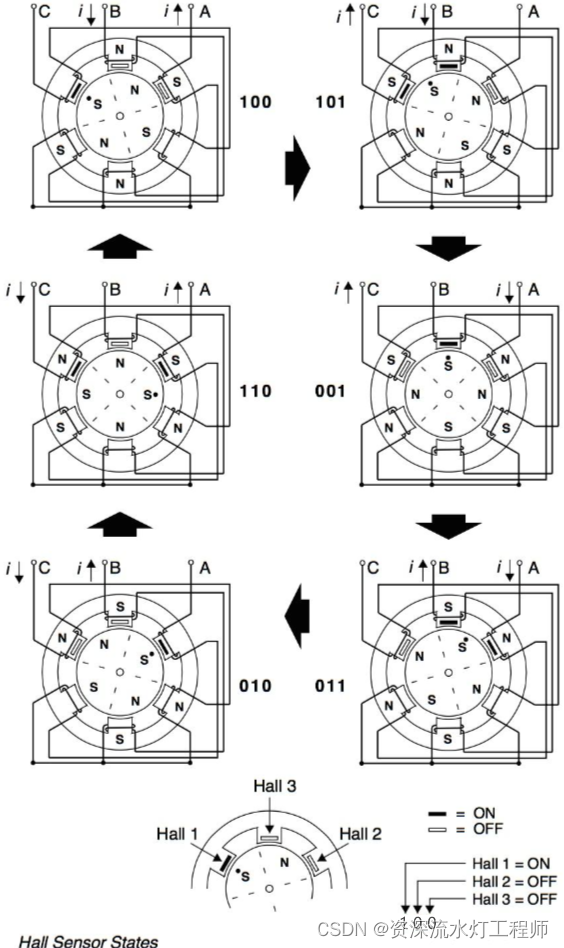
驅動器一次給兩組線圈通電,另一組線圈不通電,這個在文章前面的動圖可以看出來。
按照慣例,電流流入的線圈在定子上產生北極磁場N,電流流出的線圈則在定子上產生南極磁場S。
現在,想要實現順時針旋轉,如何使用霍爾狀態,來切換線圈通電次序和通電方向?
舉例說明,比如霍爾感應是100狀態,也就是上面的第一張圖時,那么這個時候告訴驅動器接通AB相,且電流從B相流入,A相流出。這樣B線圈組形成N極,A線圈組形成S極。線圈N極和與其正對的轉子N極相互排斥,并且吸引和它較近的轉子S極,而線圈S極,則吸引轉子N極,實現順時針轉動。同理,可以推導其他霍爾狀態時,線圈應該如何通電。最后就形成如上圖所示的6個霍爾狀態,以及在此狀態下線圈應該從哪個線圈流入,從哪個線圈流出的順序圖。
如果把霍爾時序和繞組通電順序及方向,畫在一張圖上,就是下面這幅圖,這個理解起來要輕松一點。
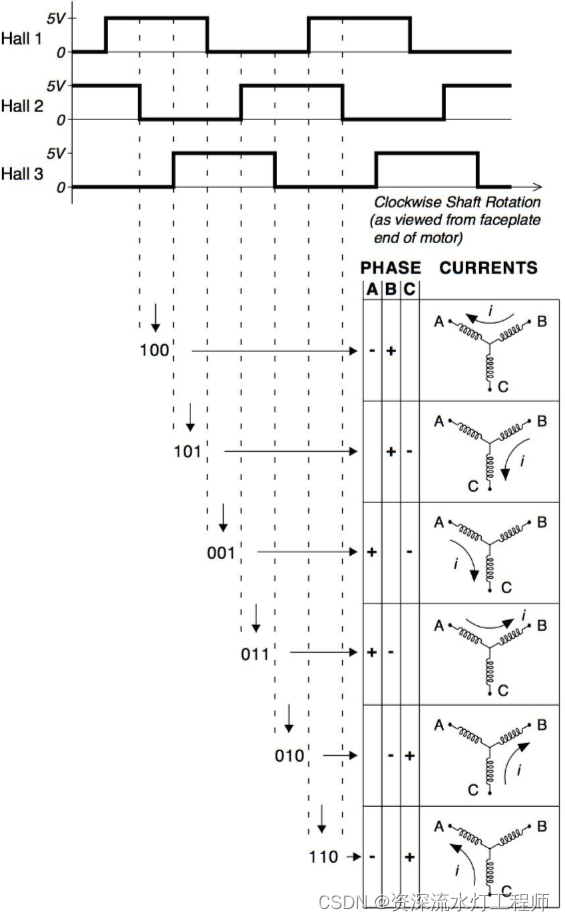
理解了這兩幅圖,也就理解了無刷直流電機的工作原理。
原文鏈接:
https://blog.csdn.net/m0_49968063/article/details/134913153
-
BLDC
+關注
關注
213文章
833瀏覽量
98260 -
無刷電機
+關注
關注
60文章
892瀏覽量
47371 -
無刷直流電機
+關注
關注
61文章
700瀏覽量
47580
發布評論請先 登錄
用STM32控制步進電機與無刷直流電機的區別是什么?








 工商網監
工商網監
評論