") 基于LockAI視覺識(shí)別模塊:C++二維碼識(shí)別
基于LockAI視覺識(shí)別模塊:C++二維碼識(shí)別

二維碼識(shí)別是視覺模塊經(jīng)常使用到的功能之一。我們將演示如何使用基于瑞芯微RV1106的LockAI視覺識(shí)別模塊進(jìn)行二維碼識(shí)別。
源代碼網(wǎng)址:https://gitee.com/LockzhinerAI/LockzhinerVisionModule/tree/master/Cpp_example/C06_test_qr_code_detector
1. 基本知識(shí)講解
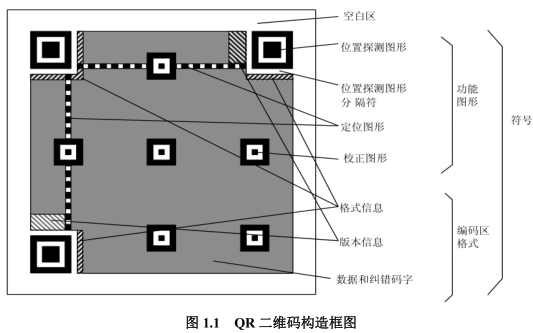
1.1 二維碼簡(jiǎn)介
二維碼(QR Code)是一種高效的二維條碼,能快速存儲(chǔ)和讀取信息,即使部分損壞也能準(zhǔn)確識(shí)別。它廣泛應(yīng)用于移動(dòng)支付、廣告、物流、票務(wù)等領(lǐng)域,用戶只需用智能手機(jī)掃描即可獲取信息或完成操作,極大提升了效率和便利性。
1.2 二維碼識(shí)別步驟
二維碼識(shí)別主要通過(guò)兩個(gè)步驟完成:圖像捕捉和解碼。
圖像捕捉:使用設(shè)備攝像頭拍攝包含二維碼的圖像。
解碼:軟件處理圖像,定位并讀取二維碼中的數(shù)據(jù),轉(zhuǎn)換為原始信息。
常用工具如ZXing和OpenCV支持快速集成到應(yīng)用中,使用戶能輕松掃描并獲取二維碼信息。
2. C++ API文檔
2.1 QRCodeDetector類
2.1.1 頭文件
#include
作用:用于聲明QRCodeDetector類,使得QRCodeDetector類可以在當(dāng)前源文件中使用。
2.1.2 構(gòu)造類對(duì)象
lockzhiner_vision_module::QRCodeDetectormodel;
作用:用于實(shí)現(xiàn)二維碼識(shí)別。
參數(shù)說(shuō)明:
無(wú)
返回值:
無(wú)
2.1.3 Predict函數(shù)
autoresults=model.Predict(input_mat);
作用:QRCodeDetector類中的一個(gè)函數(shù),用于實(shí)現(xiàn)二維碼識(shí)別。
參數(shù)說(shuō)明:
input_mat: 輸入?yún)?shù),類型為cv::Mat,表示要分析的輸入圖像。
返回值:
返回一個(gè)包含二維碼檢測(cè)結(jié)果的對(duì)象集合。每個(gè)Result對(duì)象包含二維碼的位置信息和解碼后的文本內(nèi)容。
2.2 Visualize函數(shù)
2.2.1 頭文件
#include
作用:用于聲明Visualize函數(shù),使得Visualize函數(shù)可以在當(dāng)前源文件中使用。
2.2.2 結(jié)果可視化
lockzhiner_vision_module::Visualize(input_image,output_image,
results);
參數(shù)說(shuō)明:
input_image: 輸入?yún)?shù),表示原始輸入圖像。
output_image: 輸出參數(shù),用于存儲(chǔ)帶有可視化結(jié)果的輸出圖像。
results: 輸入?yún)?shù),表示二維碼檢測(cè)的結(jié)果集。每個(gè)Result對(duì)象包含二維碼的位置信息和解碼后的文本內(nèi)容。
返回值:
無(wú)
3. 綜合代碼介紹
3.1 流程圖
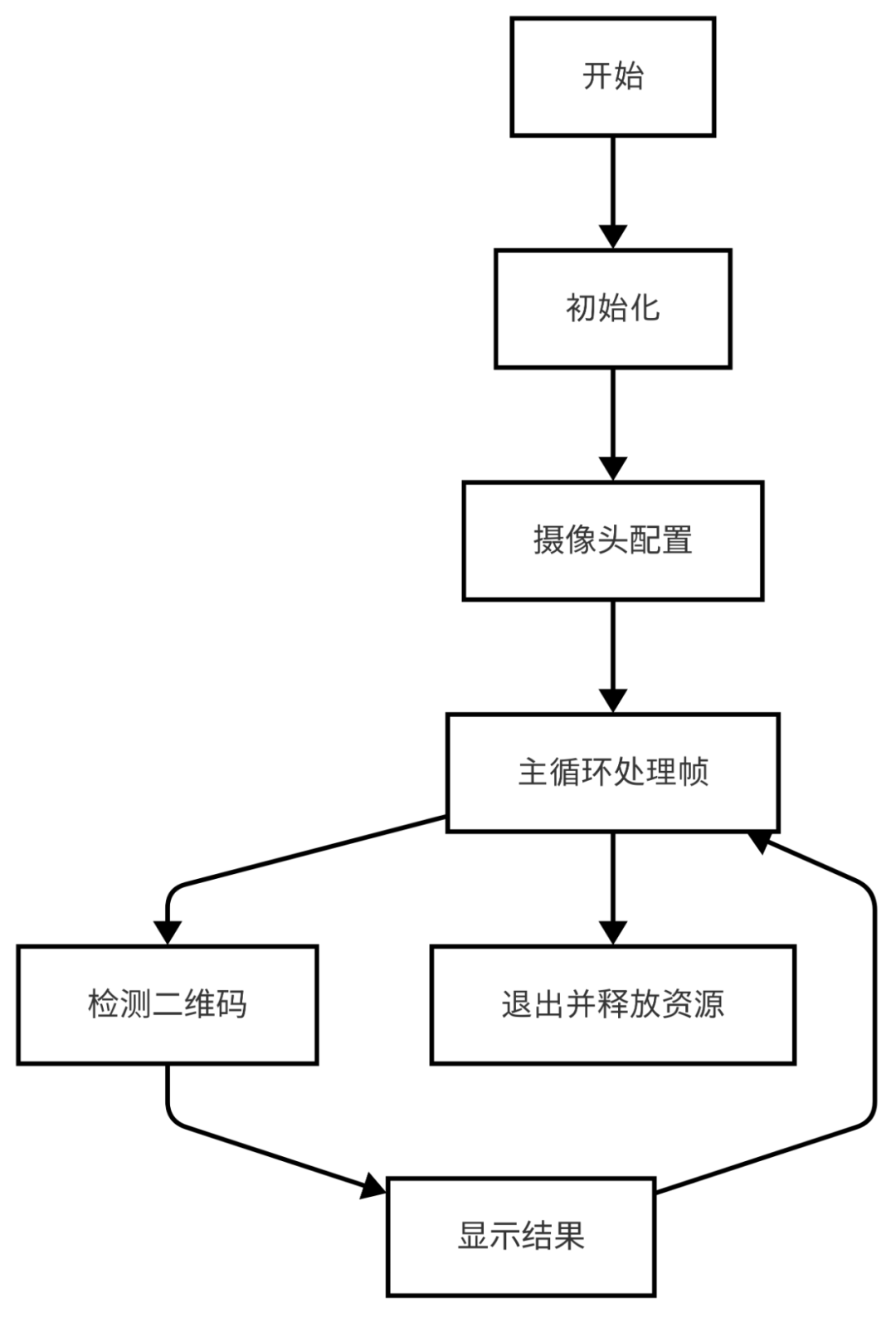
3.2 核心代碼解析
定義檢測(cè)模型
lockzhiner_vision_module::QRCodeDetectormodel;
調(diào)用攝像頭捕獲圖像
cv::VideoCapturecap;
// 設(shè)置攝像頭獲取幀的寬高
cap.set(cv::CAP_PROP_FRAME_WIDTH,640);
cap.set(cv::CAP_PROP_FRAME_HEIGHT,480);
cap.open(0);
// wihile循環(huán)中的以下代碼用于捕獲圖像幀
cap>>input_mat;
if(input_mat.empty())
{
continue;
}
檢測(cè)二維碼
autoresults=model.Predict(input_mat);
3.3 完整代碼實(shí)現(xiàn)
#include
#include
#include
#include
#include
#include
#include
#include
usingnamespacestd::chrono;
lockzhiner_vision_module::QRCodeDetectormodel;
intmain()
{
// 初始化 edit 模塊
lockzhiner_vision_module::Editedit;
if(!edit.StartAndAcceptConnection())
{
std::cerr<<"Error: Failed to start and accept connection."<<std::endl;
returnEXIT_FAILURE;
}
std::cout<<"Device connected successfully."<<std::endl;
cv::VideoCapturecap;
// 設(shè)置攝像頭獲取幀的寬高
cap.set(cv::CAP_PROP_FRAME_WIDTH,640);
cap.set(cv::CAP_PROP_FRAME_HEIGHT,480);
cap.open(0);
if(!cap.isOpened())
{
std::cerr<<"Error: Could not open camera."<<std::endl;
returnEXIT_FAILURE;
}
cv::Matinput_mat;
while(true)
{
intread_index=0;
inttime_ms=0;
for(inti=0;i<30;i++)
{
high_resolution_clock::time_pointstart_time=high_resolution_clock::now();
cap>>input_mat;
if(input_mat.empty())
{
continue;
}
// 使用 model 對(duì)象的 Predict 方法對(duì)輸入圖像進(jìn)行預(yù)測(cè),獲取二維碼檢測(cè)結(jié)果
autoresults=model.Predict(input_mat);
high_resolution_clock::time_pointend_time=high_resolution_clock::now();
autotime_span=duration_cast<milliseconds>(end_time-start_time);
time_ms+=time_span.count();
read_index+=1;
cv::Matoutput_image;
// 調(diào)用 Visualize 函數(shù)對(duì)原始圖像和檢測(cè)結(jié)果進(jìn)行可視化處理,并將結(jié)果存儲(chǔ)在 output_image 中
lockzhiner_vision_module::Visualize(input_mat,output_image,results);
edit.Print(output_image);
}
std::cout<<"Frames per second: "<<1000.0/time_ms*read_index<<std::endl;
}
cap.release();
return0;
}
4. 編譯調(diào)試
4.1 編譯環(huán)境搭建
請(qǐng)確保你已經(jīng)按照開發(fā)環(huán)境搭建指南正確配置了開發(fā)環(huán)境。
同時(shí)以正確連接開發(fā)板。
4.2 Cmake介紹
# CMake最低版本要求
cmake_minimum_required(VERSION3.10)
project(test_qr_code_detector)
set(CMAKE_CXX_STANDARD17)
set(CMAKE_CXX_STANDARD_REQUIRED ON)
# 定義項(xiàng)目根目錄路徑
set(PROJECT_ROOT_PATH"${CMAKE_CURRENT_SOURCE_DIR}/../..")
message("PROJECT_ROOT_PATH = "${PROJECT_ROOT_PATH})
include("${PROJECT_ROOT_PATH}/toolchains/arm-rockchip830-linux-uclibcgnueabihf.toolchain.cmake")
# 定義 OpenCV SDK 路徑
set(OpenCV_ROOT_PATH"${PROJECT_ROOT_PATH}/third_party/opencv-mobile-4.10.0-lockzhiner-vision-module")
set(OpenCV_DIR"${OpenCV_ROOT_PATH}/lib/cmake/opencv4")
find_package(OpenCV REQUIRED)
set(OPENCV_LIBRARIES"${OpenCV_LIBS}")
# 定義 LockzhinerVisionModule SDK 路徑
set(LockzhinerVisionModule_ROOT_PATH"${PROJECT_ROOT_PATH}/third_party/lockzhiner_vision_module_sdk")
set(LockzhinerVisionModule_DIR"${LockzhinerVisionModule_ROOT_PATH}/lib/cmake/lockzhiner_vision_module")
find_package(LockzhinerVisionModule REQUIRED)
# 定義 ZXing SDK 路徑
set(ZXing_ROOT_PATH"${PROJECT_ROOT_PATH}/third_party/zxing-cpp-v2.2.1-lockzhiner-vision-module")
set(ZXing_DIR"${ZXing_ROOT_PATH}/lib/cmake/ZXing")
set(ZXing_INCLUDE_DIRS"${ZXing_ROOT_PATH}/include")
find_package(ZXing REQUIRED)
set(ZXing_LIBRARIES"${ZXing_LIBS}")
# 基本圖像處理示例
add_executable(Test-qr_code-detector test_qr_code_detector.cc)
target_include_directories(Test-qr_code-detector PRIVATE
${ZXing_INCLUDE_DIRS}
${LOCKZHINER_VISION_MODULE_INCLUDE_DIRS}
)
target_link_libraries(Test-qr_code-detector PRIVATE${OPENCV_LIBRARIES}${LOCKZHINER_VISION_MODULE_LIBRARIES}${ZXing_LIBRARIES})
install(
TARGETS Test-qr_code-detector
RUNTIME DESTINATION .
)
4.3 編譯項(xiàng)目
使用 Docker Destop 打開 LockzhinerVisionModule 容器并執(zhí)行以下命令來(lái)編譯項(xiàng)目
# 進(jìn)入Demo所在目錄
cd/LockzhinerVisionModuleWorkSpace/LockzhinerVisionModule/Cpp_example/C06_test_qr_code_detector
# 創(chuàng)建編譯目錄
rm-rfbuild &&mkdirbuild &&cdbuild
# 配置交叉編譯工具鏈
exportTOOLCHAIN_ROOT_PATH="/LockzhinerVisionModuleWorkSpace/arm-rockchip830-linux-uclibcgnueabihf"
# 使用cmake配置項(xiàng)目
cmake ..
# 執(zhí)行編譯項(xiàng)目
make-j8&&makeinstall
在執(zhí)行完上述命令后,會(huì)在build目錄下生成可執(zhí)行文件。
5. 例程運(yùn)行示例
5.1 運(yùn)行前準(zhǔn)備
請(qǐng)確保你已經(jīng)參考凌智視覺模塊攝像頭部署指南正確下載了凌智視覺模塊圖片傳輸助手。
5.2 運(yùn)行過(guò)程
在凌智視覺模塊輸入以下命令:
chmod777Test-qr_code-detector
./Test-qr_code-detector
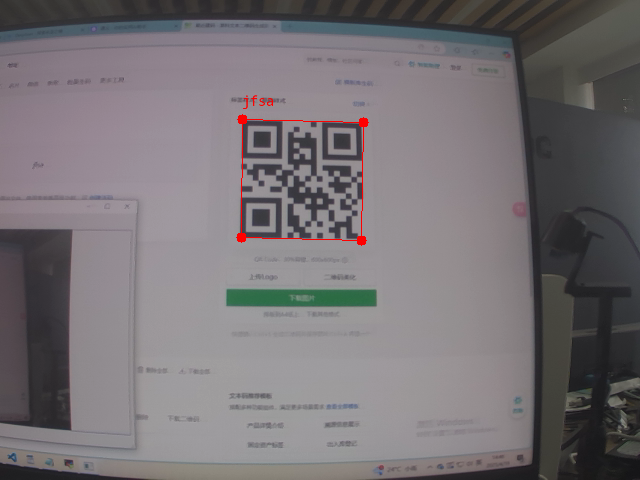
5.3 運(yùn)行效果
6. 總結(jié)
通過(guò)上述內(nèi)容,我們成功的實(shí)現(xiàn)了一個(gè)二維碼識(shí)別系統(tǒng),包括:
獲取并加載包含二維碼的圖像。
進(jìn)行二維碼的檢測(cè)和解碼,返回檢測(cè)和解碼后的結(jié)果。
可視化包含二維碼圖像的識(shí)別結(jié)果。
-
二維碼
+關(guān)注
關(guān)注
7文章
459瀏覽量
27321 -
AI
+關(guān)注
關(guān)注
88文章
35194瀏覽量
280325 -
視覺識(shí)別
+關(guān)注
關(guān)注
3文章
107瀏覽量
17074
發(fā)布評(píng)論請(qǐng)先 登錄
基于STM32的二維碼識(shí)別源碼+二維碼解碼庫(kù)lib
基于LockAI視覺識(shí)別模塊:C++二維碼識(shí)別
二維碼識(shí)別
labview二維碼識(shí)別
識(shí)別二維碼成功率不高的問(wèn)題
labview識(shí)別二維碼問(wèn)題
OpenHarmony應(yīng)用實(shí)現(xiàn)二維碼掃碼識(shí)別
ATK QR二維碼和條碼識(shí)別庫(kù)的模塊資料和使用C語(yǔ)言代碼合集免費(fèi)下載
二維碼識(shí)別模塊都運(yùn)用在哪些領(lǐng)域,它有什么作用?

工業(yè)視覺在條碼/二維碼識(shí)別領(lǐng)域的應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論