 納芯微磁傳感器技術推動人形機器人性能提升
納芯微磁傳感器技術推動人形機器人性能提升
納芯微磁傳感器技術為人形機器人運動控制提供了關鍵解決方案,其高精度磁角度編碼器可精準檢測關節位置和運動軌跡,賦予機器人更靈敏的感知能力和更流暢的運動表現。相關技術突破將推動人形機器人在通用關節和執行器等核心部件上的性能提升,為智能機器人產業發展注入新動能。
納芯微人形機器人領域的全面產品布局
隨著人形機器人技術的快速發展和市場化進程加速,其應用場景正從工業領域向消費級市場拓展。納芯微憑借廣泛的產品線布局,在這一新興市場中占據了重要地位,其產品涵蓋MCU、傳感器(電流、電壓、溫度、位置)、柵極驅動、緩沖器、電池管理,以及通信、功放、監控和基準等芯片解決方案,能夠為機器人系統提供完整的信號鏈支持。
納芯微技術市場經理陳旭驊在2025CAIMRS AI+人形機器人研討會上介紹,從當前主流人形機器人的結構來看,單臺設備平均需配備71個磁編碼器和90個電流傳感器,具體需求拆解如下:
機械臂(自由臂):以七自由度機械臂為例,其7個關節每個關節的減速機前后均需1個編碼器,單臂需14個磁角度傳感器來實現電機運行及末端位置檢測,雙臂合計28個。同時需配套14個驅動器和28個電流傳感器。
腿部和腰部關節:按四自由度保守計算,各需16個磁編碼器;若包含腰部旋轉和彎腰動作,則要額外增加4個磁編碼器,總計20個。部分高端設計采用六自由度方案,進一步推升了傳感器需求。
膝關節:針對爆發力要求高的跑跳動作,定制化膝關節動力電機通常配備4個磁編碼器(每膝2個)。
靈巧手:目前國內外方案差異較大,海外有些靈巧手能實現十六、二十二自由度。國內市場比較常見的是6個空心杯為主的結構。拇指關節是一個二自由度結構,需要3個角度編碼器(1個/空心杯電機+末端檢測);四指關節基本上以4個空心杯電機為主,每指2關節配備2個末端位置檢測編碼器,總計12個。手腕類似腰部旋轉結構,需額外的編碼器支持。
電池管理方面:主流200A電池組需配置2個高精度電流傳感器。視覺執行機構方案多樣,通常需2-4個磁編碼器實現精準定位。
納芯微高精度與高可靠性傳感方案
在角度傳感領域,編碼器技術經歷了從電位器到光電、磁角度及電感式編碼器的演進。目前,納芯微聚焦于磁角度編碼器和電感式編碼器的研發與量產,其中磁角度編碼器已廣泛應用于工業及消費領域,而電感式編碼器則在汽車EPS(電動助力轉向系統)、扭矩傳感等場景中展現優勢。
納芯微磁角度編碼器采用非接觸式設計,具備高可靠性、抗震、抗污染等特性,尤其適合動態環境。傳統光電編碼器對環境潔凈度要求高,而人形機器人的跌落、碰撞等動作易導致其失效。相比之下,磁角度編碼器不僅適應性強,還可實現17bit分辨率(精度達0.002°),且僅需單芯片+磁鐵的簡潔方案即可完成高精度檢測,大幅降低系統復雜度。
納芯微的磁編碼器主要有三種不同的技術路線,可以覆蓋全場景需求。首先是低成本的霍爾式磁編碼器方案,適用于空心杯電機等對性價比敏感的場景。第二是AMR磁阻式編碼器,具有高靈敏度,分辨率可達21bit,主要用于工控市場和機器人中的伺服電機,以及配合機器人行星減速機的多顆協同控制方案。第三是新興的電感式編碼器方案,適合中空走線或大電流場景(避免磁場干擾),目前已進入小批量階段,未來將拓展至人形機器人關節等應用。
總之,納芯微通過多技術路徑布局,為不同精度、成本及環境要求的場景提供定制化解決方案,持續推動編碼器技術在機器人領域的創新應用。
納芯微磁編碼器安裝方式詳解
磁編碼器的安裝方式主要分為在軸安裝和離軸安裝兩大類。在軸安裝是指電機軸、磁鐵軸心和芯片軸心三軸同心的安裝方式,它具有結構簡單、精度穩定的特點。而離軸安裝則是當前行業研究的熱點,特別適用于需要中空結構的減速器應用場景,為人形機器人等新興領域提供了更為靈活的解決方案。針對這兩種安裝方式,納芯微開發了不同的產品系列,以滿足多樣化需求。
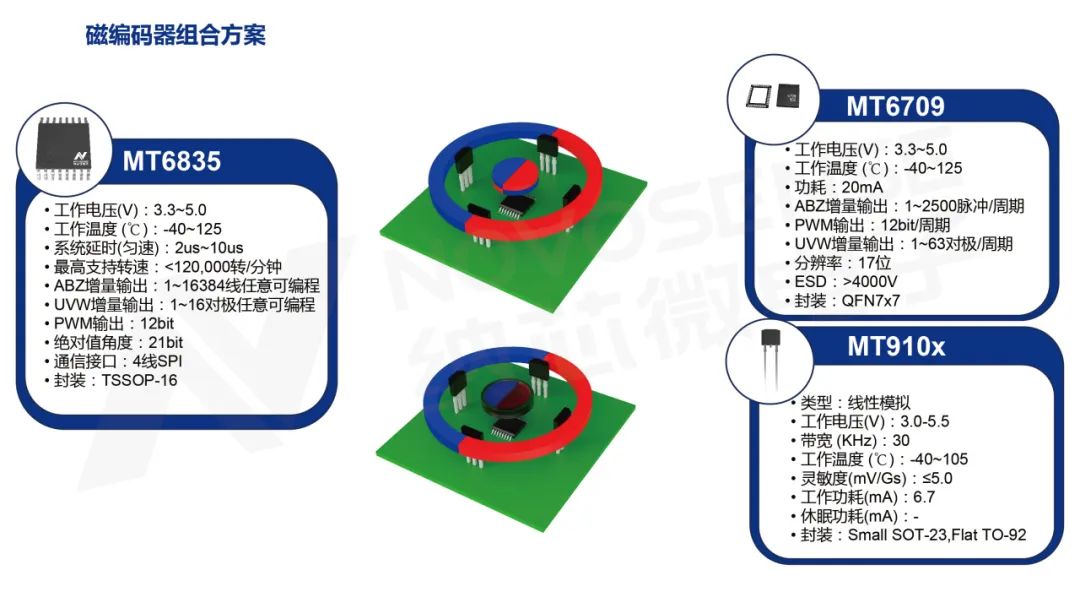
目前納芯微有三款在軸安裝磁編碼器產品:MT6835(±0.02°)、MT6826S(±0.1°)和MT6701(±1.0°)。這三款產品的年出貨量已達到500-600萬片,廣泛應用于步進電機和伺服電機領域。其中MT6701主要應用于空心杯電機等對成本敏感的場景;MT6826S和MT6835基于磁阻技術,憑借更高精度被用于伺服電機和行星減速機的多顆協同控制方案。

關于安裝技術細節,在軸安裝又可分為徑向充磁和軸向充磁兩種方案。徑向充磁方案磁場發散較遠,對安裝距離要求較低;軸向充磁方案磁力線更為集中,適合1mm以內的精密安裝場景,是納芯微主推的方案。

離軸安裝是一種創新方案,針對機器人行業對中空結構的需求,納芯微提供三種離軸解決方案。一是集成磁頭方案(MT6620),優勢是集成度高,挑戰是對磁鐵的磁間距和安裝位置要求較高;二是低成本方案(MT6709QC),其特點是通過外接磁傳感器解碼,通過自校準可將精度提升至±0.1°(勻速自校準)或±0.2°(簡潔校準)。
第三種是電感式編碼器方案(MT6901),其創新性在于,采用電感技術解決了中空走線干擾問題,能夠有效規避EMC等信號干擾。這種雙碼道游標方案是當前市場主流的絕對值編碼器,可廣泛應用在機器人關節側。

為了滿足絕對位置的監測需求,納芯微還推出了兩種創新方案——單碼道增量控制和M序列方案。單碼道增量控制采用單磁環設計,通過中間的回零信號實現位置識別。該方案采用增量控制方式,雖然存在上電時存在噪聲問題,但在工業場景中仍有廣泛應用。
M序列方案則更為先進,融合光編理論創新而成。其工作原理是通過偽隨機序列精確定位外圈對極位置,結合增量控制實現360°絕對角度測量。具體流程為:上電時讀取內碼道信號確定初始位置,然后通過增量方式進行機械控制,由芯片內部解析獲得絕對角度信息。
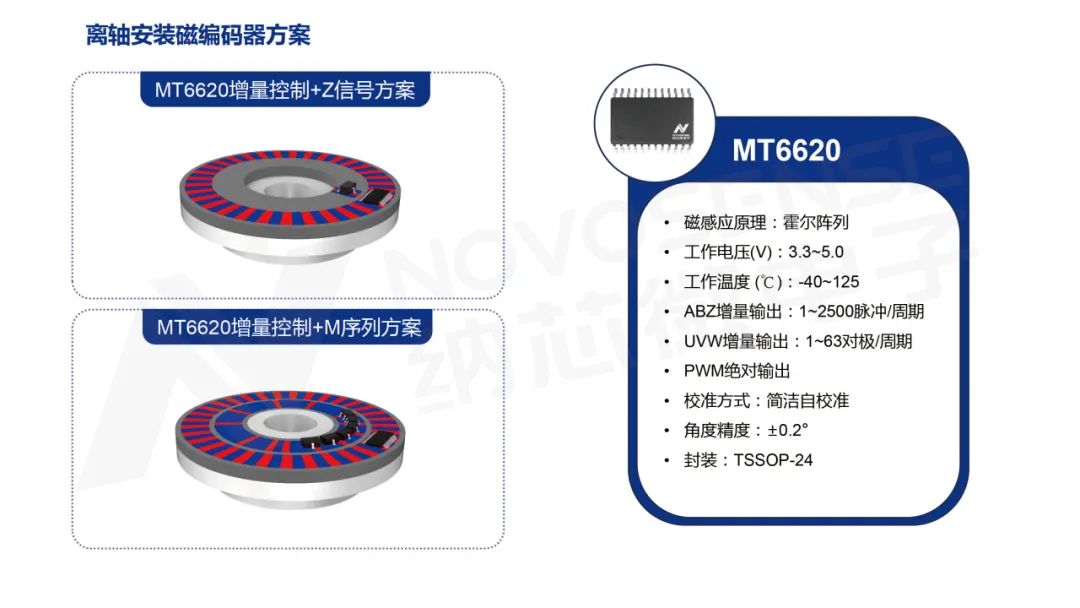
上述兩種方案各有特點:傳統方案結構簡單但存在噪聲;M序列方案精度更高但增加了復雜度。兩者均能有效滿足絕對位置監測需求,可為不同應用場景提供靈活選擇。
為滿足不同精度需求,納芯微開發了多種復合安裝方案。其中,基礎復合方案采用中間軸向充磁的在軸安裝,外圈采用4顆傳感器解碼,特點是平衡成本與性能。高精度復合方案增加了中間磁鐵屏蔽罩,能夠有效隔離外部磁場干擾,提升測量精度。
納芯微還在兩個方案基礎上開發了兩種全中空離軸方案。其外部磁環隨外轉子旋轉,內部磁環連接減速器電機端,采用8顆線性霍爾輸出信號至解碼芯片。通過增加磁屏蔽設計,其外圈精度可達0.2-0.3°,內圈精度可達0.8-1°。該方案的可靠性已在行業實際應用中得到了驗證,完美解決了中空結構下的高精度測量需求。

納芯微即將推出的MT6901電感式編碼器將成為人形機器人關節的核心解決方案。該產品采用創新的三層電感技術,在定子兩側各配置一個轉子,通過電磁感應實現雙面信號采集,從根本上消除傳統方案單側感應的局限性。
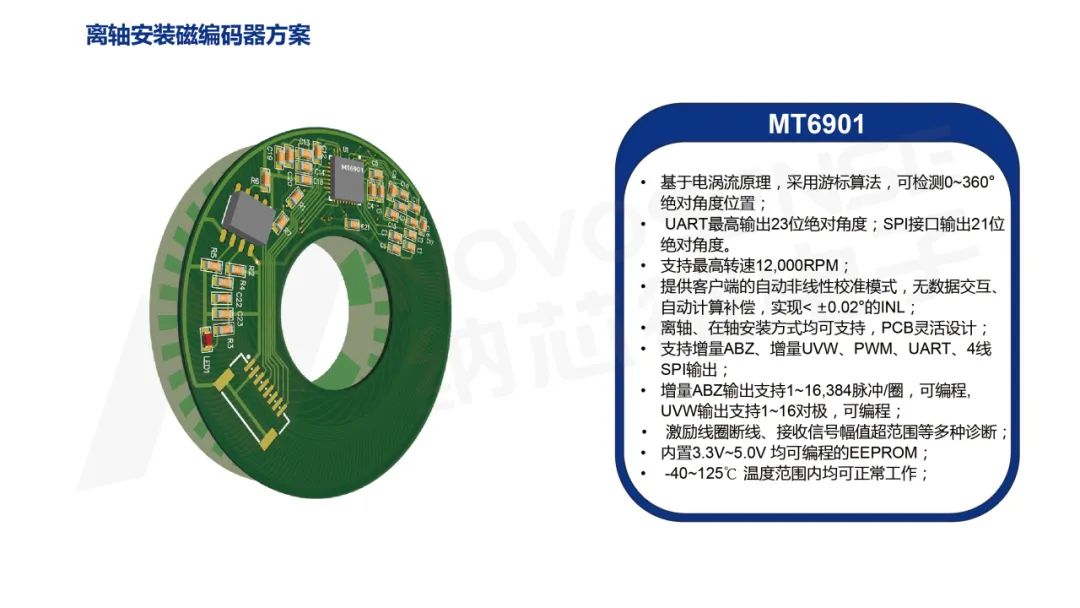
雖然三塊PCB的精密平衡存在技術挑戰,但這一設計實現了內環套外環的感應方案,能夠顯著提升測量精度,完美解決中空走線的EMC干擾問題,特別適合需要高可靠性的機器人關節應用,從而推動整個機器人行業的技術升級。
納芯微將持續拓展智能化邊界
納芯微通過持續技術創新,建立了完整的磁編碼器解決方案體系,從傳統在軸安裝到創新離軸方案,從單一測量到復合安裝,為工業自動化、人形機器人等領域提供了多樣化的選擇。特別是正在開發的MT6901電感式編碼器,有望解決行業長期存在的中空走線的干擾難題,推動磁編碼器技術進入新的發展階段。
納芯微的傳感器產品已成功導入多家客戶的人形機器人項目,在空心杯電機和通用關節領域實現了批量出貨。與此同時,在四足機器人市場也取得了突破,多個項目進入量產階段。作為國產傳感器供應商,納芯微將持續為機器人行業提供高可靠性解決方案,助力國產人形機器人把握市場機遇,實現技術突破。
納芯微電子(簡稱納芯微,科創板股票代碼688052)是高性能高可靠性模擬及混合信號芯片公司。自2013年成立以來,公司聚焦傳感器、信號鏈、電源管理三大方向,為汽車、工業、信息通訊及消費電子等領域提供豐富的半導體產品及解決方案。
納芯微以『“感知”“驅動”未來,共建綠色、智能、互聯互通的“芯”世界』為使命,致力于為數字世界和現實世界的連接提供芯片級解決方案。
-
運動控制
+關注
關注
4文章
638瀏覽量
33371 -
磁傳感器
+關注
關注
5文章
252瀏覽量
23960 -
人形機器人
+關注
關注
7文章
690瀏覽量
17474 -
納芯微
+關注
關注
2文章
304瀏覽量
14994
原文標題:從運動到感知,納芯微磁傳感器為人形機器人賦能
文章出處:【微信號:納芯微電子,微信公眾號:納芯微電子】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄

從控制到感知,一文讀懂納芯微的人形機器人布局(上篇)

從控制到感知,一文讀懂納芯微的人形機器人布局(下篇)

伺服電動缸在人形機器人中的應用
為什么人形機器人更討人喜歡?
高精度傳感器如何在創造機器人的自然動作中發揮作用?
高動態人形機器人“夸父”通過OpenHarmony 3.2 Release版本兼容性測評
校準傳感器:推動機器人性能的飛躍
國產傳感器有望在人形機器人領域實現突破!
全面分析:人形機器人快速發展,哪些國產傳感器將受益?(深度報告)

人形機器人關節的磁編碼器理想選擇——AS5048 產品介紹
FUTEK傳感器在人形機器人中的應用
洞察:人形機器人傳感器產業鏈概覽






 工商網監
工商網監
評論