 激光干涉儀:解鎖協作機器人DD馬達的精度密碼
激光干涉儀:解鎖協作機器人DD馬達的精度密碼
在工業4.0的浪潮中,協作機器人正以驚人的靈活性重塑生產線——它們與工人并肩作業,精準搬運零件,完成精密裝配。還能協同醫生完成手術,甚至制作咖啡。
標準的協作機器人關節模組由角度編碼器、直驅電機(DD馬達)、驅動器、諧波減速機、剎車、扭矩傳感器等元器件組成,DD馬達摒棄了傳統減速機構,將負載與電機轉子直接耦合,成就了協作機器人流暢的關節運動。但這一革命性設計也帶來了嚴苛的精度挑戰:任何微小的角度偏差都被直接放大為末端執行器的軌跡誤差!
當協作機器人需要執行微米級的精密任務時,一個隱形挑戰浮出水面:如何確保其核心動力單元DD馬達的旋轉精度達到角秒級?答案藏在一束激光的干涉條紋之中。
中圖儀器解決方案
SJ6000激光干涉儀+角度反射鏡組+WR50自動精密轉臺,測量精度:±1″;分辨力:0.01″。
DD馬達旋轉角度測量示意圖
測量流程
將WR50自動精密轉臺固定在馬達軸心,其頂部反射鏡可相對基座反向旋轉,反射鏡始終與激光束角度鎖定在0.5度內,轉臺每旋轉5°,反射鏡即反向旋轉5°,此時軟件將WR50的精密圓光柵角度值和SJ6000的角度值進行合并計算,得出馬達實際轉動的角度。



激光干涉儀測量結束后自動進行補償,確保DD馬達旋轉精度符合要求。
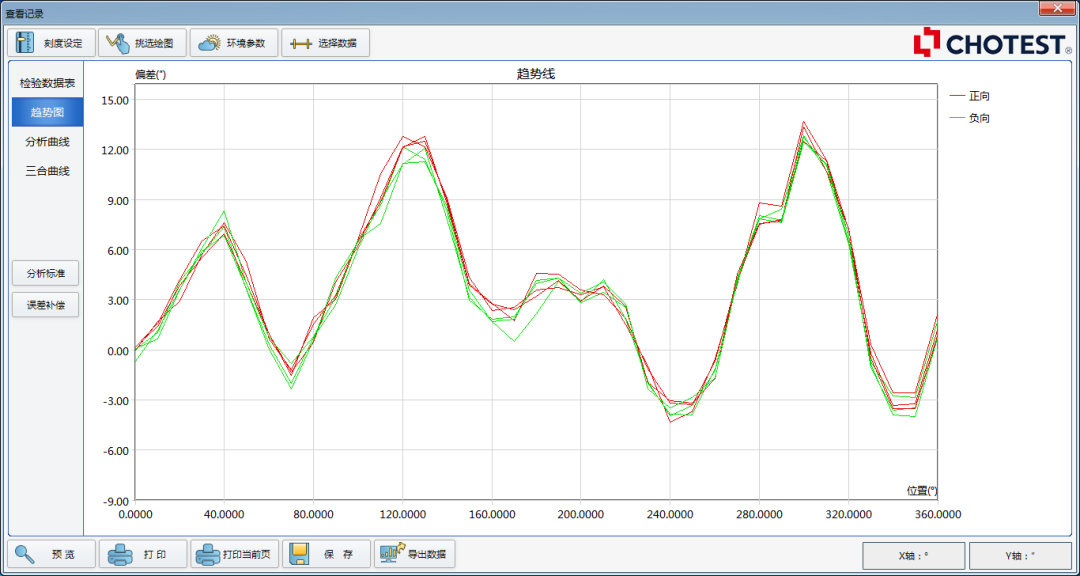
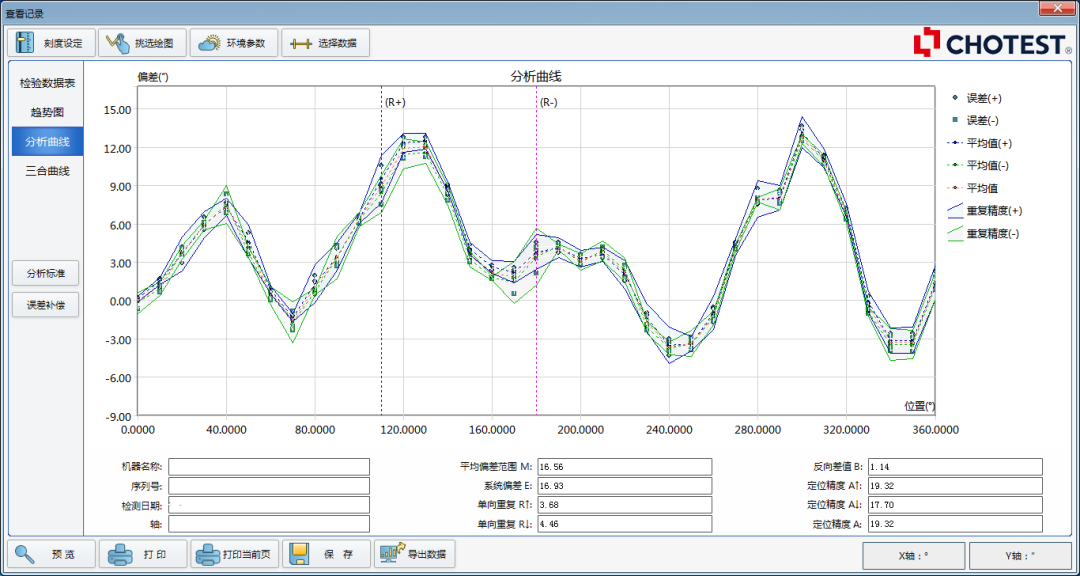
補償前數據
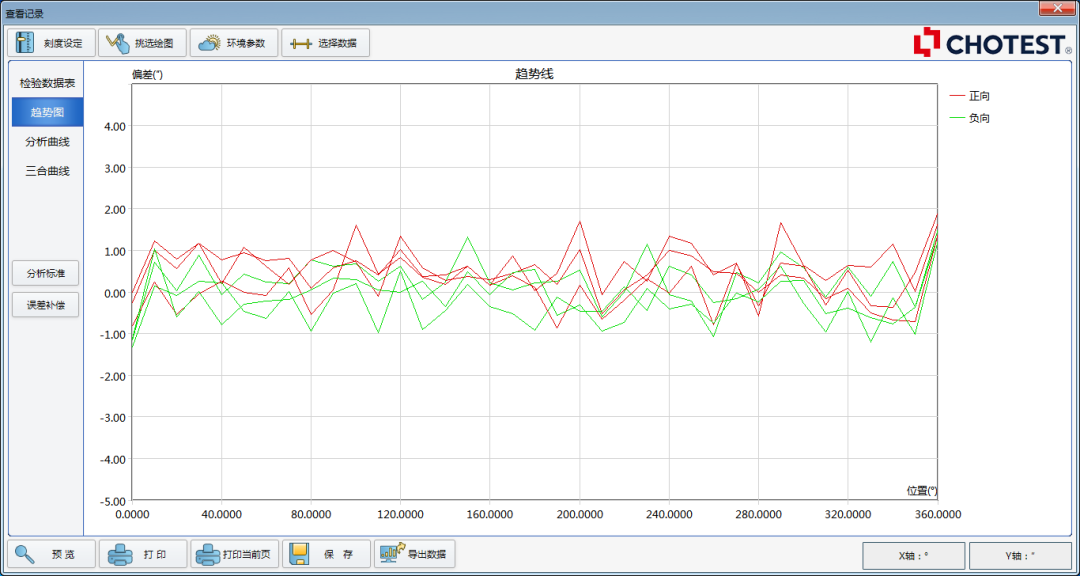
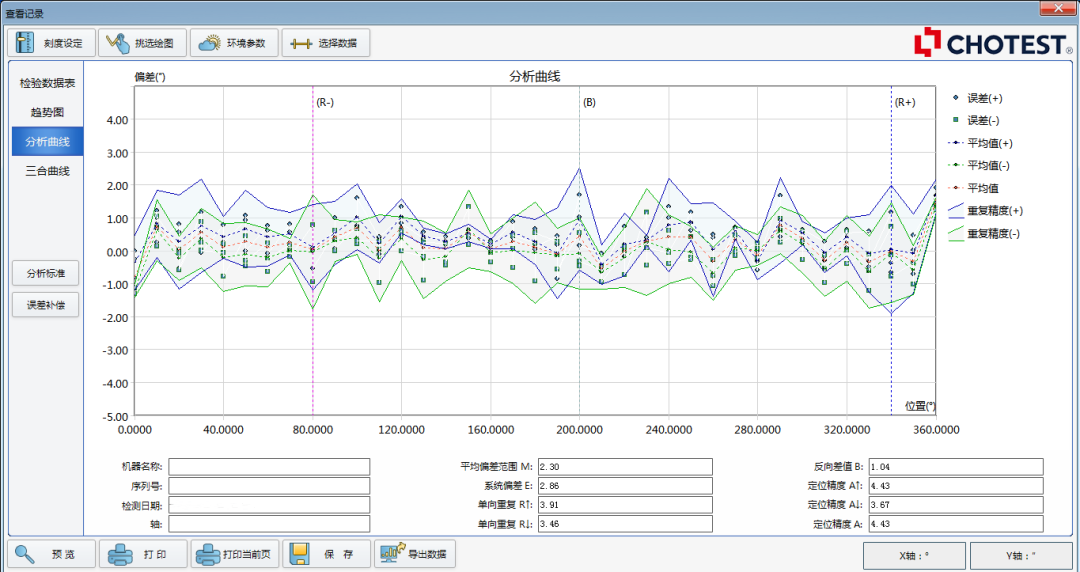
補償后數據
從汽車工廠的裝配線到無塵室里的芯片制造,協作機器人正以人類般的靈巧重塑產業。而在這背后,是以激光干涉儀為代表的精密測量儀器的默默守護,為協作機器人的安全高效精準運行保駕護航。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
馬達
+關注
關注
1文章
840瀏覽量
63060 -
激光干涉儀
+關注
關注
0文章
78瀏覽量
8254 -
協作機器人
+關注
關注
2文章
508瀏覽量
30466
發布評論請先 登錄
相關推薦
熱點推薦
激光干涉儀精度受什么影響?
激光干涉儀作為現代精密測量儀器的代表,在精密制造、計量等各個行業領域中得到了廣泛的應用,在精密位移、直線度、垂直度等測量領域發揮著重要的作用。什么是決定激光干涉儀測量
激光干涉儀是如何測量位移的?
激光干涉儀是一種廣泛應用于科學研究、工業制造和精密測量領域的儀器。在科學研究領域,激光干涉儀廣泛應用于物理學、化學和生物學等多個學科,為研究人員提供了強大的工具。在工業制造中,

激光干涉儀檢測應用——重復定位精度測量
更高精度、更穩定、更高效方向發展,而機床產業的進一步升級更離不開激光干涉儀。在機床制造中,重復定位精度是非常重要的,今天就為大家展示一下中圖儀器工程師在某精密
發表于 07-17 17:54
求助:LV與激光干涉儀通信的程序或者思路?
現在需要做一個LV與激光干涉儀通信的程序,實時讀取干涉儀數據,哪位師兄師姐做過類似的東西,請指點一下!萬分感謝! 干涉儀:安捷倫5519B配1735A模塊。有1735A驅動。
發表于 01-18 11:45
SJ6000激光干涉儀在鐘罩式氣體流量標準裝置上的應用
; 0. 1μm) 。附:SJ6000激光干涉儀主要指標主機穩頻精度:0.05ppm動態采集頻率:50 kHz預熱時間:≤ 6分鐘工作溫度范圍:(0~40)℃存儲溫度范圍:(-20~70)℃環境濕度:(0
發表于 08-28 17:36
激光干涉儀的原理是什么 白光干涉儀和激光干涉儀有何區別
根據激光干涉儀的原理,我們可以清楚知道,激光干涉儀是用來檢測設備的運動精度的,SJ6000激光
發表于 06-09 08:22
?1.7w次閱讀



影響激光干涉儀測量精度的主要因素有哪些?
影響激光干涉儀測量精度的環境因素主要指:1、當前測量環境下的空氣溫度、濕度、大氣壓力,影響在空氣中傳播的激光波長。2、被測工件溫度,影響被測對象的熱膨脹量。本文不做分析,將在下篇細述。





 工商網監
工商網監
評論