") 對焦穩(wěn)定控制算法試驗平臺的搭建和研究測試
對焦穩(wěn)定控制算法試驗平臺的搭建和研究測試
1 引言
如今市場對于手機拍照功能的需求可謂是日新月異,這對于手機攝像頭的數(shù)量及質量都提出了更高、更復雜的要求。在攝像頭驅動領域,如何控制鏡頭實現(xiàn)快速而穩(wěn)定的對焦至關重要。手機中控制鏡頭對焦的器件為音圈電機(VCM)。
音圈電機(VCM)基于安培定理工作,即當線圈導電,其中的電流產生的作用力推動固定在載體上的鏡頭移動,從而改變對焦距離。可以看到,VCM器件對于對焦距離的控制實際上是通過對線圈中電流的控制來實現(xiàn)的[2]。常見的 VCM 驅動電路。
VCM 驅動電路實際上是一個帶控制算法的 DAC電路。它可以將 I2C 總線上傳來的包含數(shù)字位置信息的 DAC code 轉換成對應的輸出電流(DAC code 對應的輸出電流);再通過 VCM 器件將輸出電流轉化為對焦距離[3]。不同的輸出電流經過音圈電機形成回路,產生不同的安培力,該力推動音圈電機上面的 Lens 運動。音圈電機上 Lens 鏡頭的運動在停止前會產生阻尼振蕩,而阻尼震蕩的大小直接影響到 Lens 的穩(wěn)定性。阻尼震蕩越大,Lens 穩(wěn)定性越差,因此鏡頭在對焦過程中不易捕捉清晰點,容易產生失焦。反之,阻尼震蕩越小,Lens 的穩(wěn)定性越好,從而鏡頭在對焦過程中更加容易穩(wěn)定在焦點處。如果鏡頭是自由的阻尼振蕩,對焦的時間將相當漫長。為了實現(xiàn)快速穩(wěn)定地對焦,需在 VCM 驅動電路數(shù)字系統(tǒng)中加入抑制阻尼震蕩的算法。這個算法對于手機攝像頭效果至關重要,只有使用最優(yōu)化的對焦快速穩(wěn)定控制算法,才能保證快速而精準的手機拍照對焦。
2 對焦穩(wěn)定控制算法試驗平臺的搭建和配置
為驗證和試驗不同算法的效果,找出最優(yōu)算法,可搭建試驗驗證平臺。
在的測試平臺中,主要由應用系統(tǒng)和測試系統(tǒng)兩部分組成。應用系統(tǒng)中,用 VC 語言編程送出指令給 MCU 產生 I2C 信號;經 FPGA 后產生包含對焦穩(wěn)定控制算法的時間間隔可控的并行數(shù)字控制信號;再經過 DAC 將這些并行數(shù)字信號轉換成不同時序的電壓;最后經過 DRIVER 將不同時序的電壓轉換成相應的不斷變化的驅動電流。由此來控制攝像頭模組中的 VCM 器件不斷地變化鏡頭位置以進行對焦。
測試系統(tǒng)中,主要是利用帶電流探頭的多通道示波器,分別對 FPGA 輸出的數(shù)字指令,DAC 輸出的電壓以及驅動輸出的電流進行監(jiān)測。最后通過激光測距儀來監(jiān)測鏡頭的位置移動情況。在對焦控制的研究中,通常采用激光測距儀來探查鏡頭位置的動態(tài)響應和細微變化,激光測距儀可以將鏡頭的位移距離轉化為電壓值輸出。
在驗證系統(tǒng)的試驗平臺中,我們具體選擇的配置如下。
(1)MCU 單片機,32 位單片機。
(2)FPGA,可采用 XILINX Spartan-6 FPGA 核心板。
(3)DAC,選用 10-bit DAC 芯片。
(4)DRIVER:DRIVER 的設計可以采用一個放大器和一個功率 MOSFET 外加采樣電阻構成。
(5)攝像頭模組,常見的攝像頭模組分為單端開環(huán),雙端中置,近年來還有帶霍爾校準和帶光學防抖的。本實驗平臺使用基礎的單端開環(huán)音圈電機,然而這些方法也可以擴展到其他電機上。
(6)帶電流探頭的多通道示波器,需要四通道示波器,其中一個通道接電流探頭。
(7)激光測距儀,可采用基恩士激光測距儀,它的轉化倍率是 10 mV/μm。
這一算法試驗平臺的主體部分的具體硬件配置如圖 4 所示。
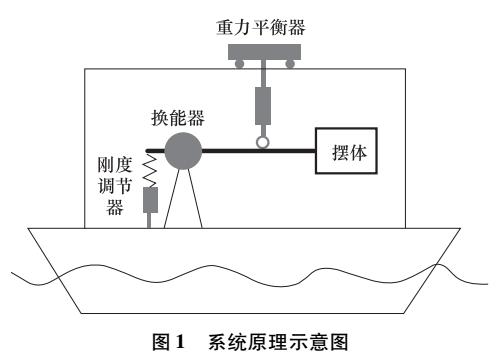
在試驗平臺的具體硬件實現(xiàn)時,首先 MCU 可以采用 32 位單片機,通過計算機對 32 位單片機使用 VC 語言進行編程控制,產生符合格式要求的I2C 數(shù)據,這一數(shù)據要包括控制模式和十位位移數(shù)據。I2C 數(shù)據再通過 XILINX Spartan-6 FPGA 核芯處理后生成帶一定時序控制的并行的十位位移數(shù)據(D0-D9)。接著,通過一個 10-bit DAC 轉成帶有一定時序控制的控制電壓信號 VC。之后,通過運放驅動功率 MOSFET 產生帶一定時序控制的控制電流信號 IL。最后,IL 通過由 VCM 模組構成的負載(VCM 模組的構成如本文前述的圖 1 所示),負載將在控制電流信號 IL 的控制下按照既定的時序和安培力移動實現(xiàn)精確對焦。
3 對焦穩(wěn)定控制算法的研究與測試
搭建好上述對焦穩(wěn)定控制算法試驗平臺后,便可以對不同算法的對焦速度和精度進行詳細的研究。在對焦穩(wěn)定時,如果能夠施加一定的對焦控制策略,在不同的時刻給予不同的電流,即給予不同的安培力,就可以有效地減小鏡頭穩(wěn)定所需的時間,使鏡頭位置快速落入焦點深度內,從而實現(xiàn)手機鏡頭的快速精確對焦。接下來研究三種對焦穩(wěn)定控制模式。
3.1 直接對焦控制模式
如果沒有控制算法,直接送出目標電流值,也就是常說的直接對焦模式,通過激光測距儀可以觀測到鏡頭的阻尼振蕩的測試波形如圖 5 所示。從圖 5 可以看出,如果沒有控制算法,鏡頭的阻尼振蕩大概需要 20 個周期甚至更長才能落入焦點深度以內[3,4],實現(xiàn)清晰對焦。當鏡頭目標位移點為 100 μm 時,鏡頭對焦落入有效的焦點深度的時間往往需要 150 ms 以上。
3.2 線性對焦控制模式
線性對焦穩(wěn)定控制算法是一種比較常見的對焦控制算法。其做法是驅動電流線性增加,最終達到全目標電流,從而實現(xiàn)快速穩(wěn)定對焦的目的。如圖 6 所示,經過這一算法的控制后,過阻尼振蕩的幅度大幅衰減,有效提高了對焦速度[5]。但到達穩(wěn)定點后的幅度較大,對焦精度的控制有所欠缺。從圖 6 可以看出,在鏡頭目標位移點為 50 μm 時,鏡頭對焦落入有效的焦點深度的時間大概需要 11.2 ms 以上。
3.3 雙階對焦控制模式
目前,業(yè)界最常用的優(yōu)化對焦控制算法為雙階對焦控制模式。它的做法是先給出一半目標電流,當線圈振蕩過目標位移點,達到最大位移點時,此時,線圈的速度接近于 0。馬上切換成全目標電流。線圈的力正好在這一點達到平衡,從而實現(xiàn)快速穩(wěn)定對焦的目的。這一對焦模式的關鍵在于準確控制電流的精度和切換的時間。保持和切換的時間要取決于線圈欠阻尼振蕩的周期[5]。從圖 7 中可以看出,在鏡頭目標位移點為 50 μm 時,鏡頭對焦落入有效的焦點深度的時間只需要 5.4 ms。
4 結語
本文通過所搭建的對焦穩(wěn)定控制算法試驗平臺,分別對不同算法所產生的不同對焦模式進行了詳細的研究。通過研究發(fā)現(xiàn),在目前業(yè)界通用的對焦穩(wěn)定控制算法中,使用雙階對焦穩(wěn)定控制算法可使鏡頭穩(wěn)定于焦深范圍內所需的時間最短。但這遠遠不是最優(yōu)化的對焦模式。
近年來,人們研究了多種多階的對焦模式,但是這些研究主要集中于建模計算和仿真驗證中[4,6],本文提供的對焦穩(wěn)定控制算法研究試驗平臺正好可以作為這些研究的試驗和驗證工具。借助這一工具,可以具體實際地看到各個對焦穩(wěn)定控制算法的優(yōu)缺點,為這一領域的研究提供了直觀便利的觀測平臺。
本文只是提供一種手機對焦快速穩(wěn)定算法研究與驗證的方法和示例,基于這一實驗平臺可以驗證更多的對焦穩(wěn)定控制算法。對焦算法的研究需要結合力學,電磁學和各種數(shù)字和模擬電路的知識才能實現(xiàn),本文為這一研究提供了工具和實例以方便更多的人對此進行探索,找到最優(yōu)化的手機對焦穩(wěn)定控制算法。
-
音圈電機
+關注
關注
4文章
436瀏覽量
18197 -
集成電路設計
+關注
關注
4文章
48瀏覽量
17882
原文標題:手機對焦快速穩(wěn)定算法的研究試驗平臺與驗證
文章出處:【微信號:appic-cn,微信公眾號:集成電路應用雜志】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
【TL6748 DSP申請】交流電機控制實驗教學平臺研究
尋找一個現(xiàn)成的PMSM控制算法驗證平臺?
Aigtek功率放大器應用案例—液晶透鏡爬山自動對焦算法研究
就SpinalHDL的測試平臺搭建進行說明
ECU試驗測試環(huán)境搭建和支持服務

TI-Davinci DM6446開發(fā)平臺的網絡文件系統(tǒng)(NFS)搭建和測試
WEB測試環(huán)境搭建和測試方法
測試環(huán)境的搭建和維護_軟硬件測試環(huán)境
php開發(fā)環(huán)境的搭建和使用
共振波力發(fā)電裝置液壓換能系統(tǒng)控制研究
飛行試驗中視頻編碼速度控制算法研究

激光對焦壓電方案,讓對焦更高速!






 工商網監(jiān)
工商網監(jiān)
評論