") 多毫米波雷達(dá)的實(shí)車(chē)連續(xù)測(cè)量應(yīng)用案例
多毫米波雷達(dá)的實(shí)車(chē)連續(xù)測(cè)量應(yīng)用案例
毫米波雷達(dá)憑借其出色的測(cè)距測(cè)速能力和全天候優(yōu)勢(shì),在汽車(chē)組合輔助駕駛系統(tǒng)的傳感器中占有重要一席。隨著產(chǎn)品從2D、3D向4D升級(jí),毫米波雷達(dá)的探測(cè)能力和應(yīng)用場(chǎng)景不斷增強(qiáng),4D毫米波雷達(dá)有望成為未來(lái)車(chē)載雷達(dá)的標(biāo)準(zhǔn)配置,在速度、距離、水平角度和垂直高度四個(gè)維度提供更多數(shù)據(jù)和可靠的感知。
01應(yīng)用與挑戰(zhàn)
在雷達(dá)應(yīng)用的開(kāi)發(fā)中,數(shù)據(jù)驅(qū)動(dòng)也成為大勢(shì)所趨。針對(duì)不同的OEM項(xiàng)目需求和毫米波雷達(dá)芯片的應(yīng)用特點(diǎn),Vector提供的VX1000高速測(cè)量標(biāo)定產(chǎn)品能夠提供完整的數(shù)據(jù)采集方案,無(wú)論是單雷達(dá)系統(tǒng)還是多雷達(dá)系統(tǒng)都能靈活自由地適配。尤其是多雷達(dá)系統(tǒng)的采集,VX1000產(chǎn)品連續(xù)無(wú)斷點(diǎn)的數(shù)據(jù)采集和模塊化的組合設(shè)計(jì),幫助客戶(hù)有效應(yīng)對(duì)當(dāng)下激烈的市場(chǎng)競(jìng)爭(zhēng)環(huán)境的高帶寬和成本優(yōu)化雙重挑戰(zhàn)。
02多毫米波雷達(dá)實(shí)車(chē)數(shù)據(jù)采集的共性需求
在實(shí)車(chē)的多毫米波雷達(dá)測(cè)試中,傳感器的布局可能存在多種情況:
1)布局1:與原車(chē)?yán)走_(dá)一致的布置,測(cè)試整個(gè)系統(tǒng)的融合感知效果;
2)布局2:冗余配置,一個(gè)車(chē)載平臺(tái)多個(gè)安裝位置布置同等或者多種傳感器型號(hào),覆蓋多個(gè)車(chē)型的測(cè)試點(diǎn)位或者同一廠(chǎng)商多種型號(hào)雷達(dá)的數(shù)據(jù)采集;
3)布局3:對(duì)標(biāo)配置,同樣的安裝位置布置不同廠(chǎng)商的傳感器。
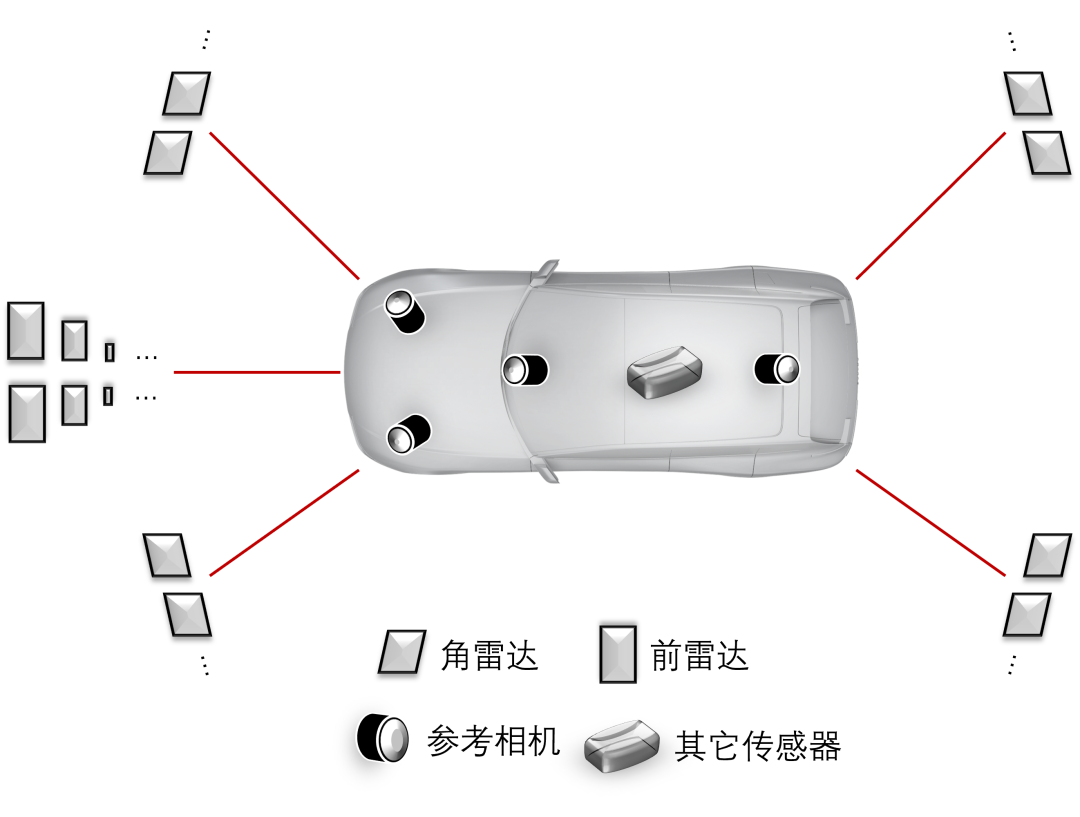
圖1:實(shí)車(chē)安裝位置示意圖
如圖1所示,單輛測(cè)試車(chē)安裝多個(gè)角雷達(dá)進(jìn)行實(shí)車(chē)測(cè)試可有效的提高試驗(yàn)效率,但也需要考慮多雷達(dá)是否存在有效干擾的問(wèn)題,針對(duì)雷達(dá)不同的波形配置、天線(xiàn)布陣、性能指標(biāo)、安裝位置等特點(diǎn)做合理化設(shè)計(jì)。
在實(shí)際項(xiàng)目中,一個(gè)較大的系統(tǒng)會(huì)布置多達(dá)10個(gè)毫米波雷達(dá),從功能和性能角度對(duì)采集系統(tǒng)的工具提出如下的要求:
功能:
1、點(diǎn)跡、航跡、點(diǎn)云和目標(biāo)數(shù)據(jù)實(shí)時(shí)可視化,并可以選擇關(guān)心的目標(biāo),在線(xiàn)查看其運(yùn)動(dòng)屬性;
2、監(jiān)控采集系統(tǒng)的硬性指標(biāo),包括軟件、硬件系統(tǒng)狀態(tài)、各鏈路的鏈接和流量狀態(tài);
3、在采集的過(guò)程中,可使用多種方式進(jìn)行標(biāo)簽,包括語(yǔ)音或事件;
4、同步采集、存儲(chǔ)所有鏈路的數(shù)據(jù);
5、采集完成后,回放分析,包括按幀、調(diào)速等;
6、采集系統(tǒng)應(yīng)包括必要的二次開(kāi)發(fā)接口;
7、可通過(guò)編程對(duì)采集后的數(shù)據(jù)進(jìn)行后處理;
8、針對(duì)不同的項(xiàng)目采集,可以自行完成適配;
9、采集設(shè)備具有可擴(kuò)展性和復(fù)用性。
性能:
1、雷達(dá)各數(shù)據(jù)源時(shí)間同步精度在1ms級(jí)別以?xún)?nèi);
2、相機(jī)數(shù)據(jù)源時(shí)間同步精度在10μs級(jí)別以?xún)?nèi);
3、所有鏈路的丟幀率低于1‰;
4、單路ADC數(shù)據(jù)流量不低于80MB/s(其中4D點(diǎn)云雷達(dá)最高帶寬可達(dá)320MB/s);
5、多通道(至少22+)CAN/CANFD數(shù)據(jù)采集;
6、參考相機(jī)分辨率不低于1080P;
7、數(shù)據(jù)速率總流量1-3GB/s;
8、提供穩(wěn)定且持續(xù)的采集性能,至少12小時(shí)(即一天)數(shù)據(jù)不間斷;
9、適應(yīng)高低溫路試所需的典型特性下運(yùn)行工作。
03Vector的綜合解決方案
Vector提供的采集方案具有高可擴(kuò)展性和高可復(fù)用性,輕松應(yīng)對(duì)以上需求。
1)單一硬件方案覆蓋多個(gè)級(jí)別的數(shù)據(jù)采集
毫米波雷達(dá)按照數(shù)據(jù)帶寬由高到低為:原始數(shù)據(jù)(RAW Data)、在傳感器中處理過(guò)的數(shù)據(jù)(Processed Data)以及探測(cè)到的目標(biāo)列表(Object List),它們會(huì)從不同的傳輸接口輸出。無(wú)論是哪個(gè)級(jí)別的數(shù)據(jù),CANape都可以通過(guò)VX1161采集板卡記錄,不同接口的連接方式如圖2所示,CANape通過(guò)用不同類(lèi)型的記錄模塊測(cè)量這些數(shù)據(jù)。這些數(shù)據(jù)類(lèi)型可以通過(guò)不同的板卡組合實(shí)現(xiàn)在同一平臺(tái)采集。
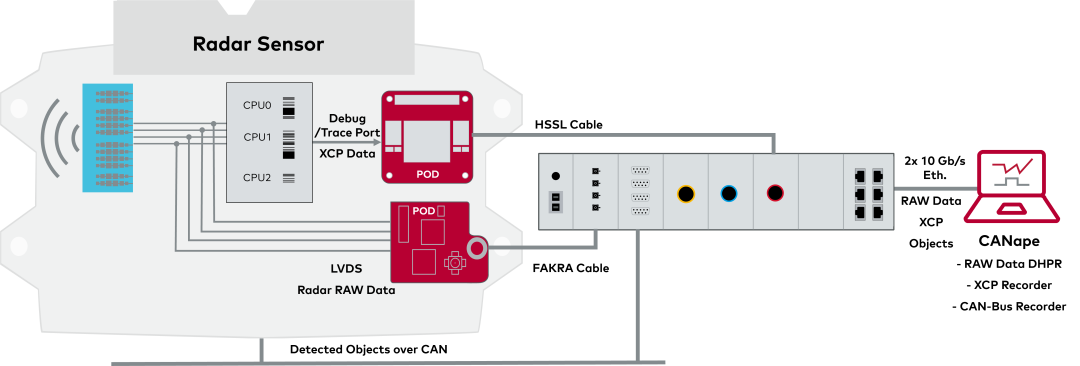
圖2:多種毫米波雷達(dá)數(shù)據(jù)采集方式
2)單一POD覆蓋多種芯片的數(shù)據(jù)采集
原始數(shù)據(jù)采集的數(shù)據(jù)量最大,可能在14ms內(nèi)完成發(fā)波后產(chǎn)生大量數(shù)據(jù)(峰值73MB/s,均值20MB/s),一般是通過(guò)高頻LVDS接口實(shí)現(xiàn)信號(hào)傳輸。Vector提供多種型號(hào)的POD適配不同的LVDS接口,POD將數(shù)據(jù)進(jìn)行串行化,再傳輸給VX1161.5x系列板卡,更多技術(shù)細(xì)節(jié):
雷達(dá)基本工作原理見(jiàn)https://mp.weixin.qq.com/s/iY1mKkWFPrCl4IgZJyUcLQ其中VX1522.01 GMSL2 POD產(chǎn)品體積可類(lèi)比硬幣大小,非常的小巧靈活,如圖3所示。另外在應(yīng)用時(shí)需要自行設(shè)計(jì)轉(zhuǎn)接板(Adapter Board)和密封外殼。
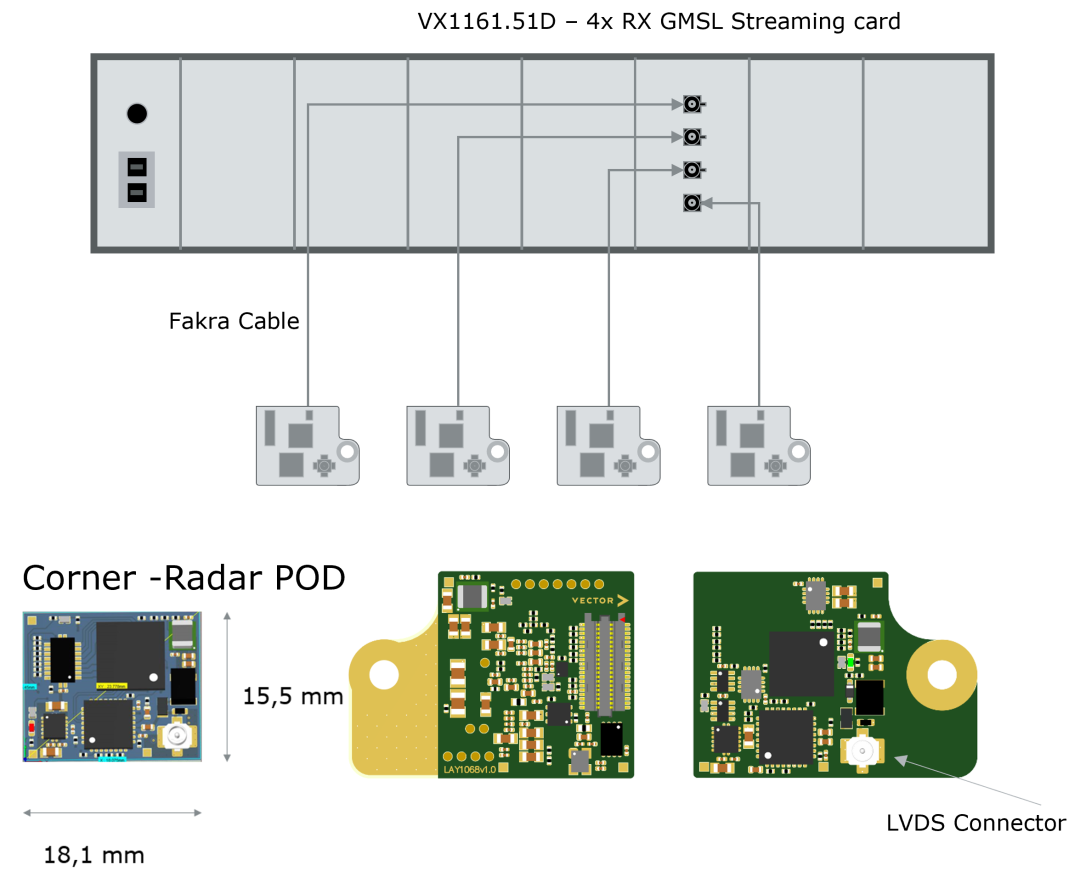
圖3:VX1522.01 GMSL2 POD產(chǎn)品圖紙
VX1522.01 GMSL2 POD產(chǎn)品專(zhuān)門(mén)應(yīng)用于此類(lèi)工作場(chǎng)景,所以針對(duì)不同的雷達(dá)項(xiàng)目可以復(fù)用。已經(jīng)評(píng)估過(guò)TI AWR2944/2E44、Calterah S244/344等在此套設(shè)備平臺(tái)均可以復(fù)用,充分詮釋了此套設(shè)備方案的性?xún)r(jià)比。需要注意的是在接口定義端仍需完成少量適配工作。
3)單一記錄存儲(chǔ)方案滿(mǎn)足不斷擴(kuò)充的數(shù)據(jù)記錄需求
VX1161板卡的模塊化設(shè)計(jì)保證了用戶(hù)可以靈活組裝并不斷擴(kuò)展記錄系統(tǒng),支持越來(lái)越多的毫米波雷達(dá)傳感器采集,以及整個(gè)ADAS系統(tǒng)的數(shù)據(jù)記錄。這個(gè)系統(tǒng)的可擴(kuò)展性除了接口的豐富性之外,還需要記錄存儲(chǔ)系統(tǒng)支持?jǐn)?shù)據(jù)帶寬和存儲(chǔ)容量的需求組合和擴(kuò)展。
軟件上:
CANape作為測(cè)量標(biāo)定的核心上位機(jī)軟件,一方面充當(dāng)數(shù)據(jù)“核心樞紐”,管理各種汽車(chē)協(xié)議通道接口、時(shí)間同步配置、數(shù)據(jù)解析監(jiān)控和數(shù)據(jù)融合顯示;另一方面每種毫米波數(shù)據(jù)都由“分布式高性能記錄儀”(Distributed High Performance Recorders,DHPR)收集。DHPR可以與CANape在同一臺(tái)計(jì)算機(jī)上運(yùn)行,也可以在另一臺(tái)計(jì)算機(jī)上運(yùn)行(通過(guò)以太網(wǎng)與CANape計(jì)算機(jī)相連)。這意味著幾乎任何體量的數(shù)據(jù)都可以通過(guò)可擴(kuò)展的計(jì)算機(jī)集群獲取,這些DHPR都由CANape管理和控制。
除此之外,基于用戶(hù)顯示個(gè)性化的需求,CANape可以實(shí)現(xiàn)離線(xiàn)分析、數(shù)據(jù)管理、車(chē)隊(duì)配置管理、標(biāo)定文件管理、團(tuán)隊(duì)云服務(wù)、Mobile UI等諸多應(yīng)用。CANape內(nèi)置的Smart Logger API可將數(shù)據(jù)通過(guò)以太網(wǎng)透?jìng)髦恋谌?a href="http://m.xsypw.cn/v/tag/1247/" target="_blank">電腦上的自定義開(kāi)發(fā)顯示界面。
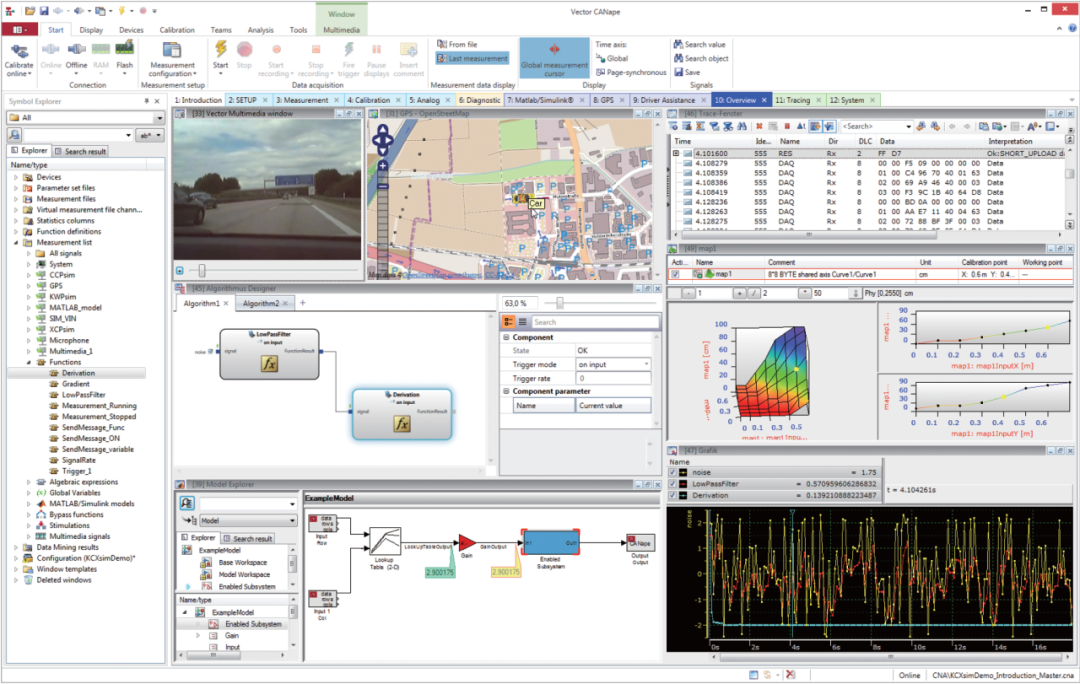
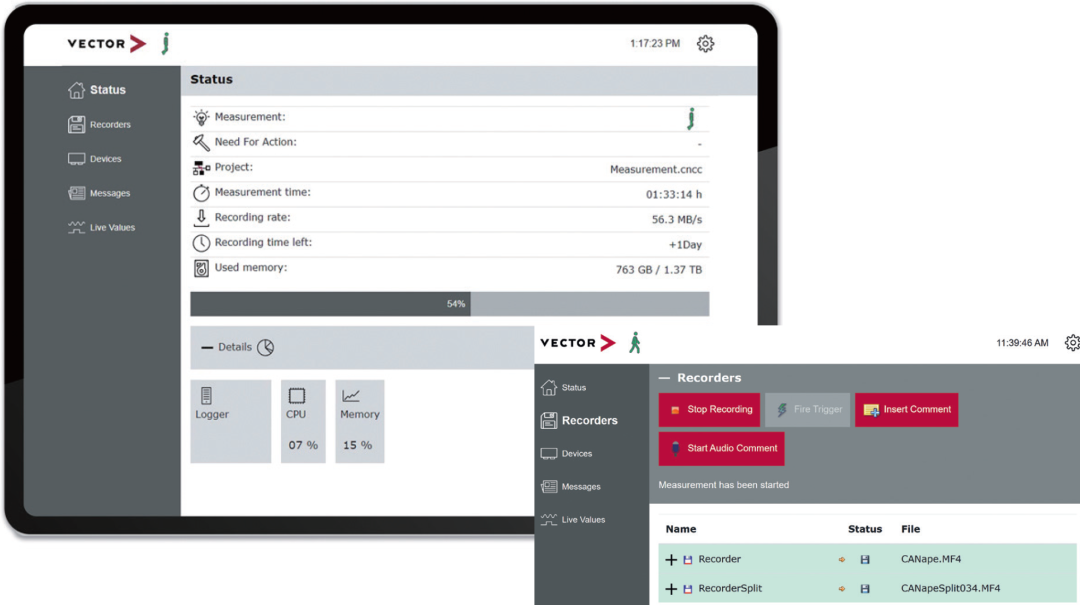
圖4:CANape桌面和Mobile UI桌面
硬件上:
VP64xx/VP75xx能夠提供穩(wěn)定的運(yùn)行平臺(tái),用于同步記錄、存儲(chǔ)、顯示、傳輸采集到的所有雷達(dá)和車(chē)身總線(xiàn)相關(guān)的原始數(shù)據(jù)和目標(biāo)數(shù)據(jù);VX1161產(chǎn)品提供更多的板卡通道,可以對(duì)實(shí)車(chē)多雷達(dá)數(shù)據(jù)采集場(chǎng)景提供強(qiáng)有力的支撐,其中應(yīng)用最廣泛的VX1522.01 GMSL2 POD產(chǎn)品是專(zhuān)門(mén)針對(duì)雷達(dá)原始數(shù)據(jù)輸出轉(zhuǎn)LVDS通訊的接口,另外VN16xx/VN56xx/VN76xx等系列接口卡作為額外的擴(kuò)展補(bǔ)充設(shè)備。


圖5:VP系列產(chǎn)品和VX1161產(chǎn)品
04總結(jié)
Vector深耕單/多雷達(dá)的測(cè)量領(lǐng)域近20年,具有完整成熟的解決方案和產(chǎn)品體系。
CANape - 用于測(cè)量與標(biāo)定的標(biāo)準(zhǔn)上位機(jī)軟件
VP64/75 – 最高帶寬可達(dá)2.5GB/s的數(shù)據(jù)記錄平臺(tái)
VX1161 – 匹配各種通信鏈路的硬件板卡,包括CAN、LVDS、Serial/HSSL、以太網(wǎng)等
VN硬件 – 總線(xiàn)/汽車(chē)以太網(wǎng)系列接口卡
MDF4 Lib - 用于讀寫(xiě)MDF數(shù)據(jù)并操作數(shù)據(jù)流的商用庫(kù)接口,包括單機(jī)/服務(wù)器&Windows/Linux版本
圖6:多種毫米波雷達(dá)數(shù)據(jù)采集方式
該方案對(duì)整車(chē)L2/L3級(jí)別的自動(dòng)駕駛輔助系統(tǒng)的功能測(cè)量驗(yàn)證同樣適用,可以極大地提高研發(fā)數(shù)采和功能測(cè)量方案的復(fù)用性,解耦產(chǎn)品組合方案的重塑性,優(yōu)化系統(tǒng)成本。
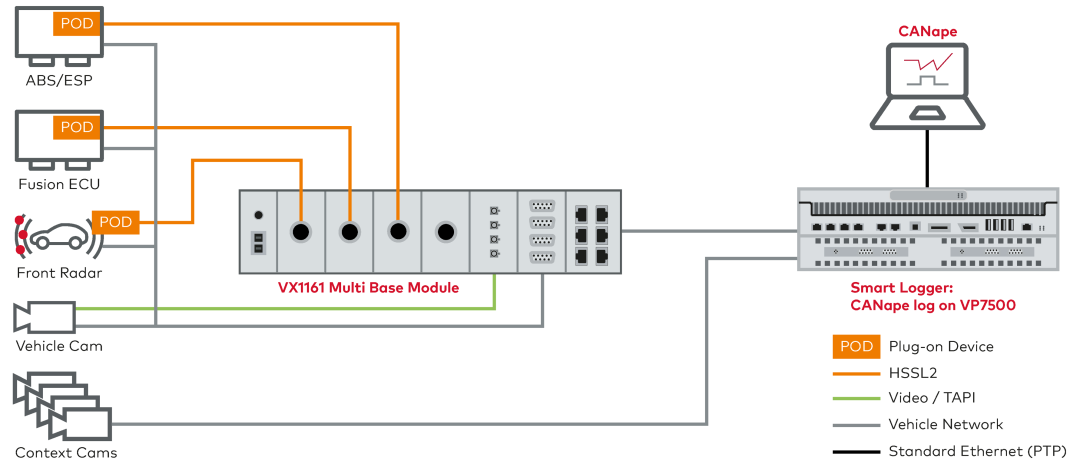
圖7:典型車(chē)載ADAS測(cè)量系統(tǒng)
-
雷達(dá)
+關(guān)注
關(guān)注
50文章
3093瀏覽量
119621 -
毫米波
+關(guān)注
關(guān)注
21文章
1970瀏覽量
65797 -
高速測(cè)量
+關(guān)注
關(guān)注
0文章
3瀏覽量
5036 -
Vector
+關(guān)注
關(guān)注
3文章
73瀏覽量
9121
原文標(biāo)題:多毫米波雷達(dá)的實(shí)車(chē)連續(xù)測(cè)量應(yīng)用案例
文章出處:【微信號(hào):VectorChina,微信公眾號(hào):Vector維克多】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論