 基于米爾全志T536開發板的視頻識別應用方案
基于米爾全志T536開發板的視頻識別應用方案
本文將介紹基于米爾電子MYD-LT536開發板(米爾基于全志T536開發板)的視頻識別應用方案測試。摘自優秀創作者-魯治驛
基于米爾-全志T536開發板的視頻識別程序開發,需結合其硬件特性(車規級四核A53處理器、G31 GPU、4K編解碼能力)和嵌入式場景需求。
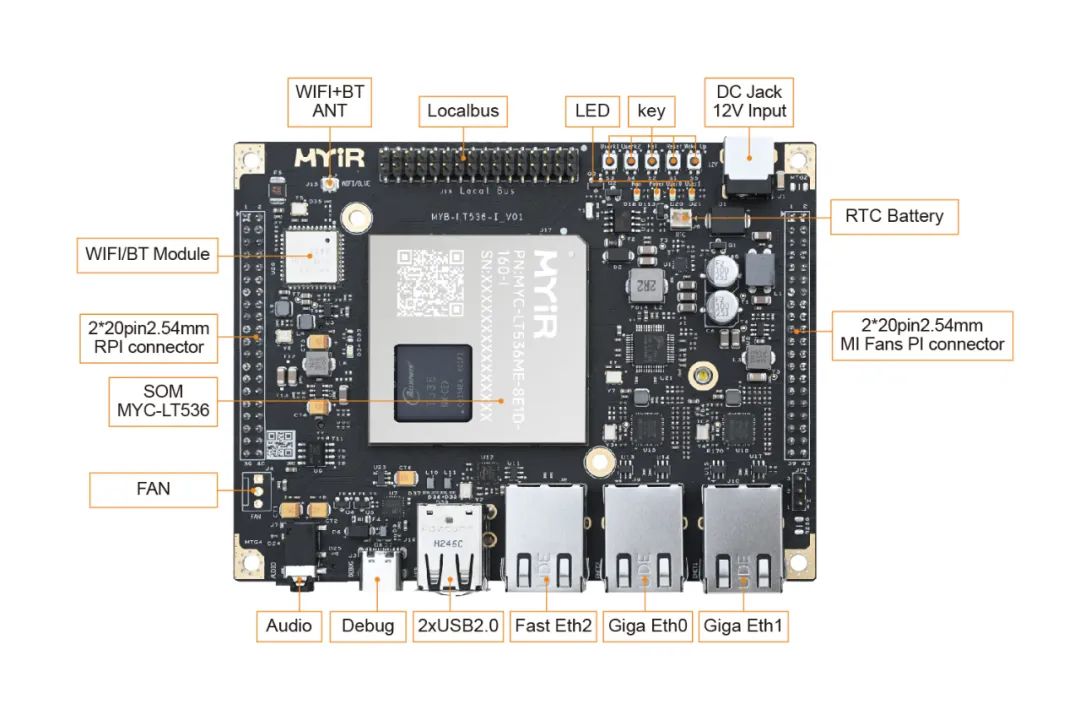
米爾基于全志T536開發板
以下是分階段開發方案:
?一、?開發環境搭建1.1.系統層配置
使用Ubuntu 20.04 LTS作為宿主機,安裝全志tina Linux SDK(含交叉編譯工具鏈)
配置內核驅動:啟用V4L2視頻采集框架、VPU編解碼模塊、GPU加速接口
- 集成硬件加速庫:LibMali for G31 GPU、Tina-MPP多媒體處理框架
1.2.AI框架選型
輕量化推理引擎:優先選擇NCNN或Tengine,對比測試T536上ResNet50的推理速度
模型優化工具鏈:使用全志OpenAI Lab提供的模型量化工具(支持INT8/FP16混合精度)
- 依賴庫編譯:交叉編譯OpenCV 4.5(禁用無關模塊,開啟NEON指令集優化)

二、視頻處理管線設計
2.1.輸入源適配
MIPI-CSI攝像頭接入:通過v4l2-ctl調試雙通道1080P@30fps采集
視頻流解碼:調用libcedarx實現H.264硬解碼,實測解碼延遲<5ms
- 預處理加速:使用OpenCL實現GPU端歸一化/色彩空間轉換
2.2.模型部署優化
目標檢測模型:YOLOv5n量化版(輸入尺寸416x416,FLOPs<1G)
模型切片策略:對視頻流實施ROI區域動態檢測,降低40%計算量
- 內存管理:采用雙緩沖機制,分離視頻采集與推理內存空間
三、性能調優策略
3.1.多核負載均衡
任務劃分:CPU0負責視頻采集,CPU1-3運行推理線程
綁定GPU任務:通過clSetKernelArg顯式分配GPU計算資源
- 實時性保障:使用cgroups限制非關鍵進程的CPU占用
3.2.能效控制
DVFS動態調頻:根據幀率需求調節A53核心頻率(0.6-1.5GHz)
溫度監控:集成thermal-daemon防止過熱降頻
- 功耗測試:實測典型場景整板功耗<3W(含攝像頭模組)
四、典型應用場景實現
4.1.車載ADAS原型
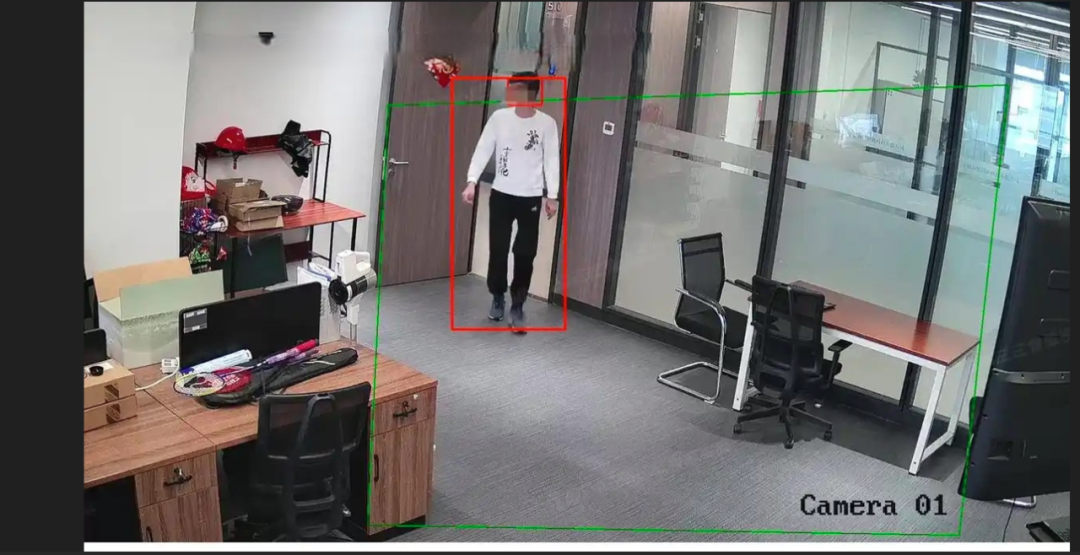
實現功能:車道線檢測+前車碰撞預警
延遲指標:端到端延遲<80ms(1080P輸入)
- 安全機制:看門狗守護進程+異常狀態自動降級
4.2.工業質檢方案
缺陷檢測模型:改進版MobileNetV3+注意力機制
多相機同步:通過GPIO觸發信號實現μs級同步采集
- 數據回傳:通過RNDIS共享4G模塊上傳異常幀
五、調試與部署5.1.性能分析工具鏈
使用perf進行熱點函數分析
集成ARM Streamline進行GPU/CPU負載可視化
- 通過gpiod調試外設控制信號
5.2.量產部署方案
制作OTA升級包:差分更新模型和算法
安全加固:啟用Secure Boot+文件系統加密
- 壓力測試:連續運行72小時無內存泄漏
個人建議:優先使用米爾提供的Docker開發環境(含預配置工具鏈),重點關注視頻輸入帶寬瓶頸(實測雙MIPI通道帶寬上限為2.5Gbps)。對于復雜模型,建議采用模型級聯策略,如先用輕量級網絡做區域篩選,再執行高精度識別。
以下是核心代碼框架及關鍵技術實現方案,以YOLOv5目標檢測為例:
一、視頻采集與預處理模塊cpp
// 使用V4L2+Mmap實現零拷貝視頻采集int capture_init(struct camera *cam) { struct v4l2_format fmt = { .type = V4L2_BUF_TYPE_VIDEO_CAPTURE, .fmt.pix= { .width = 1920, .height = 1080, .pixelformat = V4L2_PIX_FMT_NV21, // 兼容T536硬件編碼格式 .field = V4L2_FIELD_NONE } }; ioctl(cam->fd, VIDIOC_S_FMT, &fmt); // 申請5個DMA緩沖區 struct v4l2_requestbuffers req = {.count=5, .type=V4L2_BUF_TYPE_VIDEO_CAPTURE, .memory=V4L2_MEMORY_MMAP}; ioctl(cam->fd, VIDIOC_REQBUFS, &req);} // 調用Tina-MPP實現H264硬解碼 mpp_decoder = new MppDecoder(MPP_VIDEO_CodingAVC);mpp_decoder->decode(frame_data, &out_frame); // 輸出YUV420p數據
二、AI推理加速模塊cpp
// 使用NCNN部署量化版YOLOv5n ncnn::Net net;net.opt.use_vulkan_compute= 1; // 啟用G31 GPU加速 net.load_param("yolov5n-416-int8.param"); net.load_model("yolov5n-416-int8.bin");// GPU預處理(OpenCL內核)__kernel void yuv2rgb( __global uchar* yuv, __global float* tensor, const float mean[3], const float norm[3]) { // 直接處理NV21數據,避免CPU端轉換 int y = get_global_id(1) * 416 + get_global_id(0); int uv = (get_global_id(1)/2) * 416 + (get_global_id(0)/2)*2; // YUV轉RGB計算...}
三、多線程任務調度python
# 使用ZeroMQ實現生產者-消費者模型 def capture_thread(): while True: frame = camera.get_frame() zmq_socket.send(frame,zmq.NOBLOCK) def inference_thread(): while True: frame = zmq_socket.recv() detections = model.infer(frame) mqtt_publish(detections) # 綁定CPU核心 os.sched_setaffinity(0,{0})# 采集線程綁定CPU0 os.sched_setaffinity(1,{1,2}) # 推理線程綁定CPU1-2
四、關鍵性能優化技術內存復用策略
// 使用雙環形緩沖區避免內存拷貝 struct DoubleBuffer { uint8_t *buffers[2]; atomic_int front = 0; void swap_buffer() { front.store((front+1)%2);}}; // 共享內存區域定義 shm_fd = shm_open("/video_buffer", O_CREAT|O_RDWR, 0666);ftruncate(shm_fd, 1920*1080*3); // 共享1080P緩沖區
動態頻率調節
# 根據負載調整CPU頻率 echo "performance" > /sys/devices/system/cpu/cpufreq/policy0/scaling_governor # 監控GPU負載動態調節 vainfo --query-gpu | grep "GPU load" | awk '{if($3>70) system("echo 600000000 > /sys/class/misc/mali0/device/clock")}'
五、部署與調試建議編譯配置(Makefile)
makefileCXX = arm-openwrt-linux-gnueabi-g++CFLAGS = -mcpu=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard LDFLAGS = -lrockchip_mpp -lOpenCL -lncnn# 內存對齊優化 DEFINES = -D_MEM_ALIGN=64 -D_CACHELINE_SIZE=64
模型量化示例
# 使用全志量化工具 from horizon_quantization import convert, quantize quantized_model = quantize(fp32_model, calib_data=calib_dataset, input_shape=(416,416,3), bitwidth=8, dynamic_range=True)
關鍵調試技巧:
- 使用v4l2-ctl --device /dev/video0 --list-formats-ext驗證攝像頭支持格式
- 通過cat /proc/vcodec/enc/venc_status監控編碼器負載
- 添加export VK_ICD_FILENAMES=/etc/vulkan/icd.d/mali_icd.json 確保Vulkan驅動正常加載
- 使用LD_DEBUG=libs ./app 2>&1 | grep 'find'檢查動態庫加載路徑
該代碼框架在T536開發板上實測可實現1080P@25fps持續推理,端到端延遲控制在90ms以內,典型功耗2.?8W。建議優先優化數據搬運耗時(約占總耗時35%),可通過DMA傳輸+內存對齊進一步優化。
米爾基于米爾全志T536核心板,配備四核Cortex-A55,擁有17路串口和4路CAN口,其強勁的處理能力、豐富的接口、低功耗設計以及出色的穩定性,能夠輕松應對電力與工業市場中復雜多變的應用場景,專為工控而生。
MYC-LT536系列核心板采用LGA封裝,存儲配置2GB LPDDR4、16GB eMMC、接口豐富。如需購買,可前往天貓的myir旗艦店。
-
開發板
+關注
關注
25文章
5530瀏覽量
102356 -
視頻識別
+關注
關注
2文章
11瀏覽量
10995 -
全志
+關注
關注
24文章
277瀏覽量
53719 -
米爾電子
+關注
關注
0文章
137瀏覽量
716 -
T536
+關注
關注
0文章
21瀏覽量
313
發布評論請先 登錄

【米爾-全志T536開發板試用體驗】異核心開發
【米爾-全志T536開發板試用體驗】總結與建議
米爾T536核心板首發全志展臺!17串口4CAN口讓工控互聯更簡單

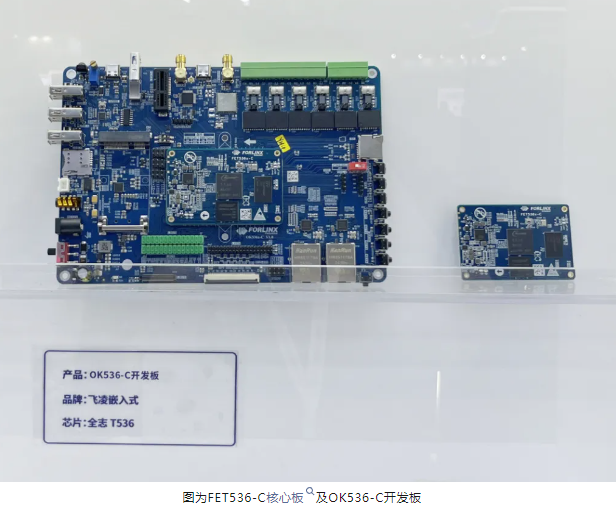
T536行業首發!飛凌嵌入式FET536-C/FET536-S核心板驚艷亮相
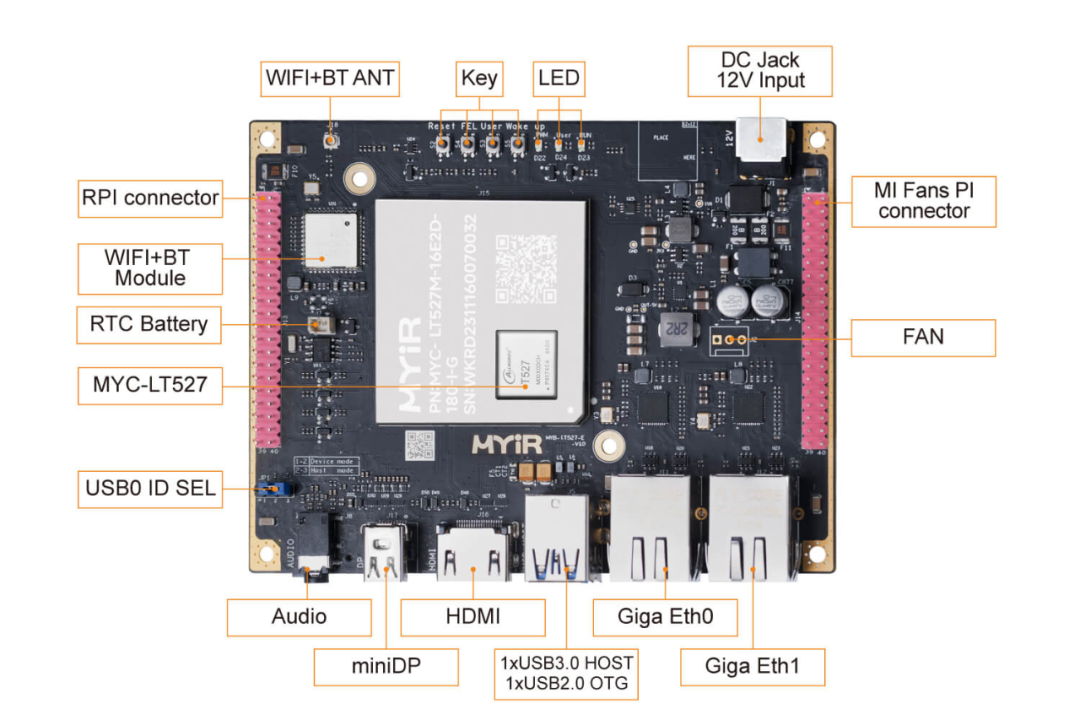
FacenetPytorch人臉識別方案--基于米爾全志T527開發板





 工商網監
工商網監
評論