 為何端到端成為各車企智駕布局的首要選擇?
為何端到端成為各車企智駕布局的首要選擇?
[首發于智駕最前沿微信公眾號]在智能駕駛領域,端到端技術的提出標志著自動駕駛系統在架構設計上的一次根本性轉變。從傳統的模塊化架構將感知、決策、規劃以及控制等各子系統彼此獨立分工,到如今依托深度學習算法實現輸入到輸出端的整體映射,端到端技術通過將原始傳感器數據直接輸入單一神經網絡,并在網絡中經過多層的特征提取和信息融合,最終輸出車輛的控制指令,從根本上打破了以往人工規則定義的局限。端到端架構的優勢在于數據處理上的無縫銜接、信息傳遞時的低損耗以及整個系統在目標任務下的統一優化,能夠更高效地學習和適應各種復雜駕駛場景。這種基于數據驅動的深度學習方法不僅降低了大量人工設計規則的成本,還通過共享的骨干網絡,顯著提高了系統的迭代效率與維持成本的降低。
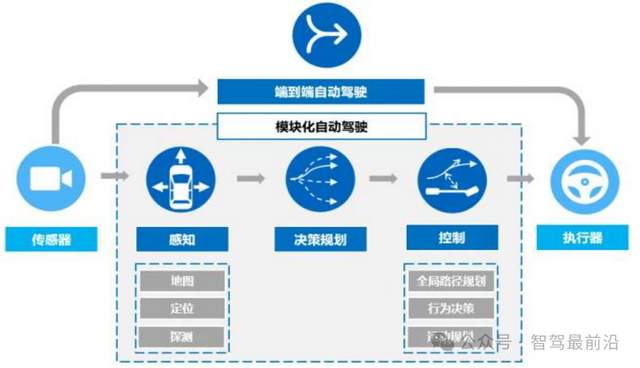
端到端與模塊化自動駕駛

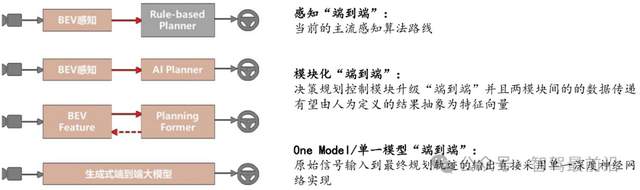
端到端技術路徑演進
端到端自動駕駛技術的發展可追溯到2016年,當時英偉達通過DAVE-2系統首次將攝像頭圖像直接映射為轉向指令,開啟了自動駕駛從模塊化向端到端轉變的探索歷程。隨后,隨著深度神經網絡技術的日趨成熟及GPU計算能力的大幅提升,端到端技術在多個方面獲得了突破,從早期的行為克隆到后來與強化學習的結合應用,端到端系統不僅可以借鑒專家行為進行策略學習,更能在大量“試錯”過程中優化決策邏輯。針對系統泛化能力不足的問題,還通過聚合在線數據及模擬真實場景的合成數據,提高了模型對長尾駕駛場景的適應能力,從而在實際應用中不斷突破技術瓶頸與安全性能的限制。
端到端技術演進

端到端的核心技術及優勢探討
端到端架構的核心優勢在于其數據驅動理念,依賴于大規模且高質量的數據集支撐模型的訓練,讓自動駕駛實現“老司機”的能力。現實世界中的自動駕駛場景復雜且多變,駕駛環境中的細微差別往往決定了模型能否精準推斷出相應的控制指令。如特斯拉在其FSD(完全自動駕駛)系統的迭代過程中,通過不斷向模型輸入上百萬段駕駛視頻,使得端到端神經網絡能夠捕捉到駕駛中潛在的各種異常情況,并通過自動標注技術大幅提升了數據處理的效率。這種數據引擎技術不僅讓模型在面對長尾場景時表現得更加魯棒,還在一定程度上彌補了真實數據采集不足的弊端,進一步提升了端到端系統在極端工況下的應對能力。超算中心與云端算力資源的引入,也為大規模數據集的訓練提供了堅實保障,推動了大模型對復雜路況的識別與預測能力實現質的飛躍。
在端到端自動駕駛技術中,不同的算法實現方式也各具特點,其中模仿學習與強化學習分別代表了兩種不同的研發路線。模仿學習通過對專家行為的模仿實現策略學習,其核心思想是將駕駛問題轉化為監督學習問題,通過行為克隆(BC)使模型輸出與專家決策盡量一致。盡管這種方法簡單高效,但在實際應用中難免面臨協變量偏移與因果混淆等問題。為了解決這一問題,通過引入DAgger等在線訓練方法,進一步優化模型對復雜場景的應對能力。此外,逆最優控制(IOC)及其衍生的對抗模仿學習(GAIL)方法,通過從專家示范中推斷獎勵或成本函數,讓系統能夠從行為背后更深層次的決策邏輯中獲得啟發,進而提升模型的自主學習與決策水平。
相比之下,強化學習技術則通過不斷“試錯”來獲取駕駛策略,其核心過程是模型在與交通環境的持續互動中,根據環境反饋不斷調整自己的決策策略。盡管強化學習在理論上具有強大的自動優化能力,但是現實中的應用卻面臨數據稀缺、場景復雜、以及訓練周期長等實際問題。因此,在實際系統設計中,許多方案選擇將強化學習與監督學習相結合,既通過監督信號獲得基礎的環境理解能力,又利用強化學習進一步改善模型的長期決策與應對不確定性能力。結合兩者的優勢,使得整個端到端系統在保留監督學習便捷高效的同時,又可以在面對復雜動態場景時,通過不斷交互積累經驗,從而實現更高水平的智能駕駛性能。
硬件支持、數據引擎以及計算平臺的迭代更新同樣對端到端自動駕駛系統的應用起到了至關重要的作用。以特斯拉為代表的車企,在硬件層面不斷進行自研芯片的迭代,從最初的HW1.0到最新的HW4.0,每一次升級都極大提升了車輛端的算力水平,并配合自研的超級計算機Dojo,構建了一整套高性能的訓練與推理平臺。硬件與軟件的協同進化,使得端到端模型在處理復雜場景時能夠保持高效的實時響應能力。此外,云端數據訓練平臺和算力的支持不斷推進,不僅為大模型的訓練提供了必要的算力資源,還通過云端蒸餾技術將云端的復雜模型知識傳遞給車端輕量化模型,有效解決了車端芯片算力受限的問題。

各車企端到端技術分析
當前國內外諸多車企均在積極布局端到端自動駕駛技術,并圍繞核心算法展開技術攻關。特斯拉依托純視覺方案不斷推進一體化端到端技術,利用多種傳感器數據融合技術、Transformer網絡、占用網絡及大量自動標注數據,實現了從輔助駕駛到完全自動駕駛的技術跨越。華為通過模塊化端到端架構構建了基于激光雷達和視覺融合的智能駕駛系統,利用自研的鴻蒙智行平臺和全棧AI芯片,通過GOD網絡和PDP網絡實現感知與決策規劃的深度融合。華為的方案在解決傳感器數據融合難題的同時,也通過大規模云端數據訓練、算力冗余和自研工具鏈來保障系統的可解釋性與安全性,從而為未來L3級自動駕駛商用奠定基礎。

ADS 3.0采用兩段式端到端架構
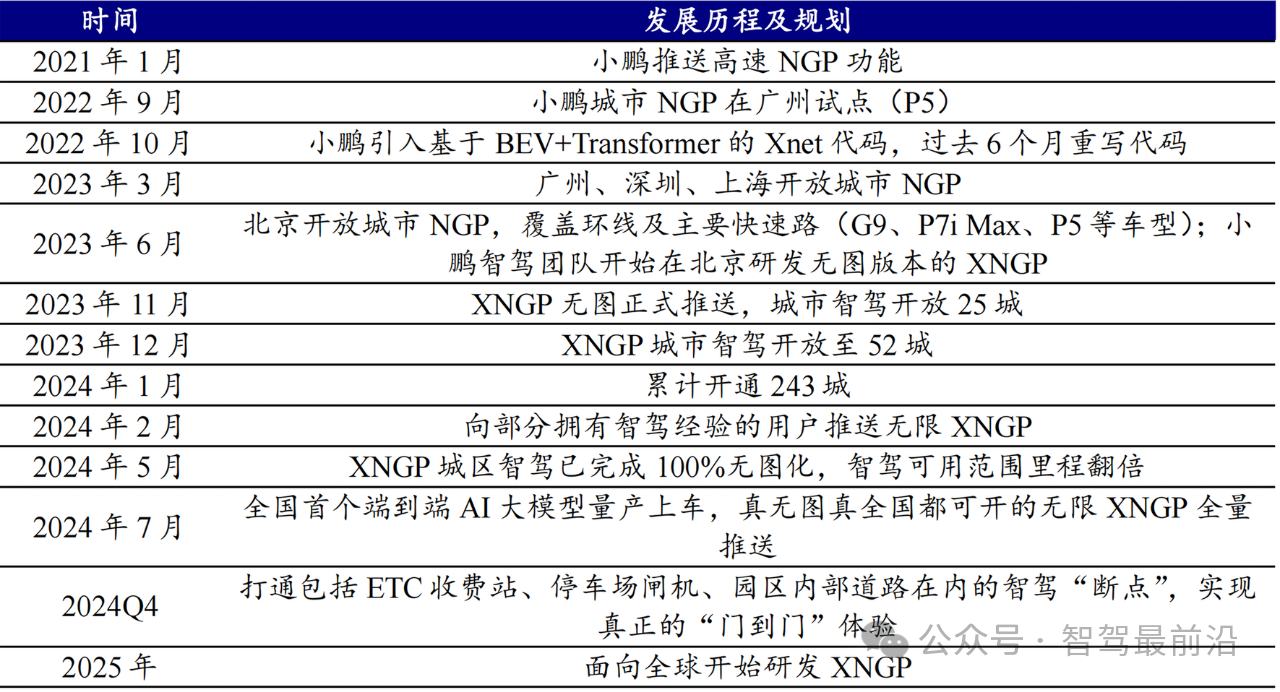
小鵬汽車則走出了一條基于純視覺方案、依托云端蒸餾模型提升車端模型性能的技術路線。小鵬的系統通過自研的BEV視覺感知大模型XNet,在大規模數據集和云端深度學習架構的支持下,大幅提高了對動態目標和靜態障礙物的識別精度。小鵬汽車在云端大模型與車端輕量化模型之間借助知識蒸餾技術實現知識傳遞,使得車端的計算負擔得以顯著降低,從而達到在有限算力下實現更高精度駕駛決策的目標。通過不斷迭代優化,小鵬不僅提高了駕駛路徑規劃的精準度,更在復雜場景下實現了違停、緊急避險等關鍵技術指標的顯著改善,成功實現了L2+級別自動駕駛的技術突破與市場試點。
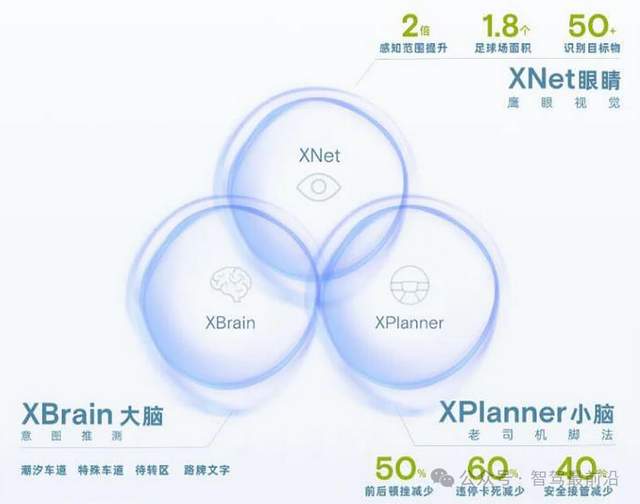
小鵬XNGP模塊化端到端架構
理想汽車則以雙系統并行模式為特色,利用視覺語言模型(VLM)輔助端到端模型進行規范控制,將傳感器數據直接映射為駕駛軌跡的同時,通過并行運行的VLM系統對復雜場景進行深度分析與推理。這種“快—慢系統”協同的架構不僅在大部分場景下依賴于高效的端到端直覺反應,在遇到極端或復雜場景時還可調用VLM進行有意識的決策輔助,從而有效提升了系統的安全性與魯棒性。理想汽車這種基于雙系統并行的創新思路,既保留了端到端系統高效實時的特點,又通過VLM的邏輯推理能力針對特定復雜場景進行深度優化,形成了一個從感知到規劃、由快速反應到深度思考相互補充的閉環式智能駕駛決策體系。
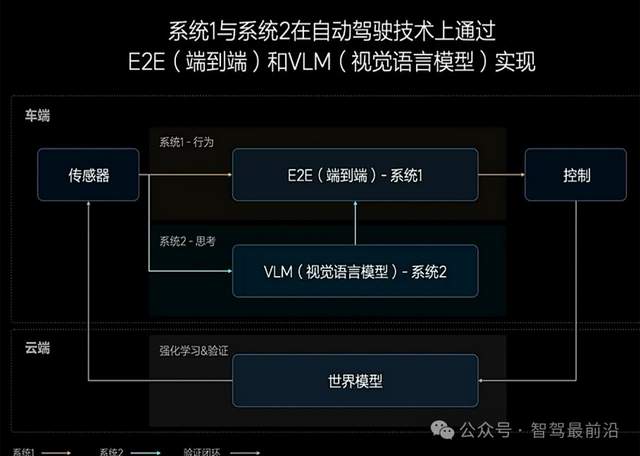
理想汽車雙系統架構

總結
端到端自動駕駛技術正處于從早期試驗階段向大規模商用過渡的關鍵時期。隨著政策的支持和市場競爭的不斷加劇,各主要車企已經開始借助先進的AI大模型和知識蒸餾技術,推動端到端模型在車載應用中的普及與成熟。從高階自動駕駛測試數據積累、車端與云端技術協同,到基于深度學習的場景識別和融合感知,各項技術指標均顯示出端到端自動駕駛系統正穩步向著更高的精度、更強的魯棒性和更高的安全性發展。隨著各大車企在10萬元級別車型上逐步推廣高階NOA(自動導航輔助駕駛)和L2+級別自動駕駛系統,智能駕駛技術正從高端豪華車的專屬配置向主流市場延伸,實現了從“智駕平權”到全場景商用的跨越。
審核編輯 黃宇
-
端到端
+關注
關注
0文章
33瀏覽量
10681 -
自動駕駛
+關注
關注
788文章
14209瀏覽量
169604
發布評論請先 登錄
“端到端”智駕芯片,英偉達DRIVE Thor接棒,車企自研芯片對標行業領先
特斯拉帶火“端到端”智駕,國內車企加速上車


自動駕駛中基于規則的決策和端到端大模型有何區別?

小米汽車端到端智駕技術介紹

端到端自動駕駛技術研究與分析

黑芝麻智能端到端算法參考模型公布

爆火的端到端如何加速智駕落地?

智己汽車“端到端”智駕方案推出,老司機真的會被取代嗎?

端到端讓智駕強者愈強時代來臨?
智駕進程發力?小鵬、蔚來端到端模型上車






 工商網監
工商網監
評論