") 從新角度回顧過去100年地面交通控制發(fā)展的幾個關(guān)鍵轉(zhuǎn)變點
從新角度回顧過去100年地面交通控制發(fā)展的幾個關(guān)鍵轉(zhuǎn)變點
本文從路權(quán)這個新的角度回顧了過去 100 年地面交通控制發(fā)展的幾個關(guān)鍵轉(zhuǎn)變點,并結(jié)合目前新興的無人車和自動駕駛技術(shù),分析了今后 50 年地面交通控制的發(fā)展方向。
在現(xiàn)代社會,地面交通出行與我們每個人密切相關(guān)。在當前城市道路日益復雜和擁擠的情況下,如何保證交通出行的安全和便捷是國內(nèi)外社會大眾和科研工作者共同關(guān)注的熱點問題。
圖 1 1924 年德國柏林坡茨坦廣場的五邊交通燈塔
實現(xiàn)該目的的重要方法之一是實施有效的交通控制。很多研究者將 1914 年出現(xiàn)在美國俄亥俄州克利夫蘭市(Cleveland,Ohio)的電氣交通信號燈作為地面交通控制系統(tǒng)的真正發(fā)軔如圖 1。在過去的 100 多年中,交通控制從理論方法到產(chǎn)品系統(tǒng)都經(jīng)歷了深刻的變化。然而在日益增長的交通出行需求壓力下,現(xiàn)有的交通控制方法已經(jīng)逐漸達到性能天花板。今后的地面交通控制應該如何發(fā)展是擺在所有研究者面前的重要問題。
所謂道路通行權(quán)(Right of Way,簡稱路權(quán)),可理解為對特定時空范圍道路資源的優(yōu)先占有權(quán)和使用權(quán)[1-2]。類似于鐵路的軌道閉鎖機制 [3],地面駕駛同樣需要保證在特定的時間和空間內(nèi),最多只有一輛車存在。換句話說,如果我們按照時間和空間兩個維度,以最小時間和最小空間為分割單位,將道路資源劃分為時空網(wǎng)格,那么,每個格子最多只能被一輛車占用。如果違反了這一法則,碰撞就會發(fā)生。
歷史上的地面交通控制正是圍繞著如何合理妥善解決路權(quán)競爭的問題而發(fā)展起來的。歷經(jīng)百年來的發(fā)展,交通系統(tǒng)大致經(jīng)歷了無控制時期、標識標線控制時期、單點定時交通信號控制時期、智能交通控制時期、車路協(xié)同時期和自動駕駛時期等幾個階段。圖 2 的時間軸描繪了標志著這幾個時期切換點的國內(nèi)外典型事件所發(fā)生的年代。
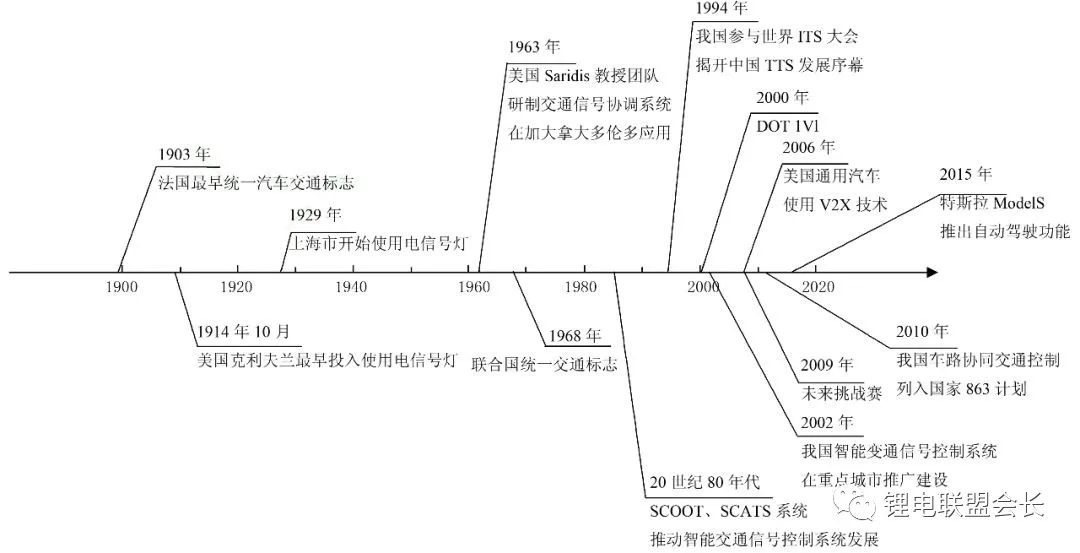
圖 2 地面交通控制百年發(fā)展時間軸圖
有鑒于此,我們從路權(quán)這個新的角度回顧了過去 100 多年地面交通控制發(fā)展的幾個關(guān)鍵轉(zhuǎn)變點,對比了各個時期交通路權(quán)的獲取方式和性能。我們特別結(jié)合目前新興的車聯(lián)網(wǎng)、無人車和自動駕駛技術(shù),探討了基于規(guī)劃分配或競價獲取的交通路權(quán)分配,分析了今后 50 年地面交通控制的發(fā)展方向。
1. 無控制時期
最初,人們在遇到路權(quán)紛爭時,往往遵從「先到先行,互相禮讓」的基本原則。雙方駕駛員根據(jù)各自目視的結(jié)果,決定由誰優(yōu)先通過沖突區(qū)域,并按照默契各自駕駛。實際上,這也是從步行、騎馬和駕駛馬車時代起就遵循的基本路權(quán)決定方式。
但這一路權(quán)決定方式存在諸多問題:
1)該決定方式非常依賴于駕駛員對周邊環(huán)境的正確感知和合理判斷。在車速較快、視線不佳、交通狀況復雜等情況下,駕駛員難以準確的判斷何時何地會發(fā)生碰撞,因此無法決定路權(quán)歸屬 [4]。
2)該決定方式需要多方駕駛員采用能夠共同理解的方式進行交流。在車燈還未出現(xiàn)的時候,駕駛員會將手臂伸出窗外,通過不同的手勢來表示其行駛意圖。即使在車燈已是車輛必備件的今日,駕駛員也經(jīng)常以眼神和手勢來輔助換道、并線等操作。為此,Google 公司還在 2015 年提交了無人車和人類駕駛員交流的專利[5]。然而,手勢交流首先沒有統(tǒng)一的交互標準。人們互相打手勢或者眼神示意的方式千差萬別;特別是由于歷史文化差異,不同國家和地區(qū)對同一手勢可能有截然不同的解讀。其次,手勢交流的通信速度慢、可視距離短、談判效率低,在車輛速度較高時,極易出現(xiàn)誤差而造成交通事故。
3)該決定方式在相當程度上取決于駕駛員個人的禮讓精神,路權(quán)的分配很可能由「合作」演變?yōu)椤父偁帯梗踔痢笓寠Z」。
基于這三點,基于默契的路權(quán)談判很難在短時間內(nèi)有效達成。因此,這一路權(quán)決定方式在汽車時代逐漸被新的交通控制方式所代替。
2. 交通信號標線控制時期
早在中國周代,已有「列樹以表道」的記載。在古羅馬時代的軍用大道上也設(shè)有里程碑和指路牌。但這些僅僅是標記道路信息,并未指示路權(quán)。
1903 年,由于法國汽車聯(lián)盟的積極推進而使法國成為世界上最早的在全國范圍內(nèi)使用統(tǒng)一的汽車交通標志的國家。而直到 1930 年以后,統(tǒng)一的交通標志法才在英國各地獲得認可,使交通標志更加規(guī)范化。1935 年,美國的第一版《統(tǒng)一交通控制設(shè)施手冊》(Manual of United Traffic Control Devices)出版,在全美國統(tǒng)一了制作交通標志的辦法和標準。這一階段,交通標志依然以提示駕駛員危險為主要職責。如法國的交通標志當時在黑色的木板上用白漆書寫「左拐」、「右拐」、「橋梁」等提醒司機注意的文字。
1968 年,聯(lián)合國公布《道路交通和道路標志、信號協(xié)定》作為各國制定交通標志的基礎(chǔ)。從此各國的交通標志在分類、形狀、顏色、圖案等方面逐漸向國際統(tǒng)一的方向發(fā)展。地面交通進入了「各行其道」的時代。
道路交通標識通常用圖形符號和文字來傳遞特定的交通法規(guī)以及交通運行控制方法的信息。道路交通標線是由路面標線、箭頭、文字、立面標識、突出路邊、道路輪廓線等交通地面車道配合和路權(quán)設(shè)置的基礎(chǔ)設(shè)施。這兩者的作用都是為了管制、引導、控制和分配交通流,可單獨使用也可配合使用。
交通標識標線控制的優(yōu)勢在于造價低廉耐用,盡量減少人對于路權(quán)的理解歧義和紛爭。在道路中明確標識了道路使用權(quán)重的通行權(quán)、先行權(quán)、占用權(quán)等,是目前道路交通中最為重要的靜態(tài)交通設(shè)施。特別是車道線的引入,大大簡化了車道路權(quán)的分配方式,減少了車輛行駛沖突發(fā)生碰撞的風險。
但交通標識標線對交通沖突點(交叉路口和出入口匝道)區(qū)域中不同方向車輛的路權(quán)很難起到有序和安全的控制引導。因此,交通信號控制成為了地面交通控制的研究重點。
3. 單定點交通控制時期
最早的交通信號燈出現(xiàn)在 1868 年英國倫敦威斯敏斯特區(qū),為調(diào)度馬車的運行而設(shè)立,由煤氣點燃發(fā)光的,僅僅工作了 20 余天便因為煤氣爆炸而夭折。所以,很多人認為 1914 年出現(xiàn)在美國俄亥俄州克利夫蘭市(Cleveland,Ohio)的電氣交通信號燈才是交通控制系統(tǒng)的真正發(fā)軔[6]。而我國直到 1929 年才在上海市第一次安裝交通信號燈。
交通信號燈的出現(xiàn),使得「令行禁止」成為了交通沖突點的新型路權(quán)分配和提示方式。通常,交通信號控制用在道路空間上不同方向交通流沖突的交叉口,用來在時間維度上給不同方向的交通流分配道路通行權(quán)。
傳統(tǒng)的交通控制系統(tǒng)將道路上的連續(xù)多個車輛視為流體,通過局部時空中的流體密度、速度和流率來簡化描述車輛的運動[7-11]。為了避免車輛在路口發(fā)生碰撞,一般根據(jù)車流方向劃分不同的相位,在一段時間內(nèi)依次切換各個相位,以便不同方向的車輛通過。切換一遍所有相位的時長稱為周期,其中去掉紅燈黃燈,路口能被利用的有效時間和周期的比值稱為綠信比。
交通信號燈的引入一方面改善了交叉口通行秩序,另一方面降低了駕駛員信息負荷,從而減輕駕駛負擔。在安裝了交通信號燈的道路交叉口,潛在沖突區(qū)域的路權(quán)決定有了「權(quán)威認證」。路權(quán)由原先駕駛員之間的「分布式」談判轉(zhuǎn)變?yōu)椤讣惺健怪概伞拇耍藗冎恍璋凑战y(tǒng)一的紅綠燈規(guī)則,和前車保持距離行進,無需花費時間和精力和其他方向的司機進行溝通,大大降低了道路交叉口的事故率。而居于高處、有著明亮顏色的紅綠燈能夠被通過道路交叉口的眾多駕駛員一致看到并明確認知,很好地解決了消息交互和確認的問題。
但早期的信號燈由警察根據(jù)目視所及的有限信息,進行手動控制。每個警察僅能控制一個路口的信號燈。這種控制方式缺乏足夠的交通信息感知能力和聯(lián)動控制機制,難以提高交通效率。其后很長一段時間,交通信號的三個主要參數(shù):周期、相位和綠信比,均被設(shè)置為定時切換,時段內(nèi)固定的方式[12]。這一工作方式雖然較人工控制簡單,但仍然不能最大化交通運行效率。
4. 智能交通控制時期
隨著智能交通系統(tǒng)概念的深入普及,使得對于城市交通的控制轉(zhuǎn)向信息化和智能化的方向。交通信號控制開始采用計算機聯(lián)網(wǎng)控制,根據(jù)磁感應線圈、攝像頭等采集的數(shù)據(jù)計算交叉路口的實時交通流量,研發(fā)相應的交通流量分配模型來確定信號配時方案,動態(tài)調(diào)整交通信號的三個主要參數(shù):周期、相位和綠信比,實現(xiàn)整個交通路網(wǎng)的配時優(yōu)化。
美國 Purdue 大學的 Saridis 教授及其團隊是最早開始智能交通信號控制研究的小組之一 [13]。其后,英國運輸與道路研究所研制的 SCOOT 系統(tǒng)[14-15]和澳大利亞 RTA 所研制的SCATS 系統(tǒng) [16-17] 成為了業(yè)界使用最廣的智能交通信號控制系統(tǒng)。SCOOT 系統(tǒng)和 SCATS系統(tǒng)以其動態(tài)實時自適應控制的特點,對城市交通信號控制的推動與發(fā)展起到了實質(zhì)性作用。日本、美國、歐洲其他地區(qū)的也隨之發(fā)展和普及起來。目前中國的智能交通系統(tǒng)發(fā)展迅速,在北京、上海、廣州等大城市已經(jīng)建設(shè)了先進的智能交通系統(tǒng)。
當今的智能交通控制系統(tǒng)更加復雜。例如美國亞利桑那大學王飛躍等提出「無交通信號燈的未來交通設(shè)想」[18-19],其 ATLAS 開發(fā)的 RHODES 智能交通控制系統(tǒng)[20]就包括:智能交通數(shù)據(jù)收集和處理,智能預測交通流量變化,智能計算最優(yōu)配時方案等多個模塊,組合起來以求最佳的協(xié)同不同路口的信號燈,實現(xiàn)「智能聯(lián)網(wǎng)聯(lián)控」。
隨著智能、網(wǎng)絡(luò)通訊等技術(shù)的發(fā)展,智能交通系統(tǒng)在交通信號控制行業(yè)得到越來越廣泛的運用。基于互聯(lián)網(wǎng)、大數(shù)據(jù)以及云計算的交通信號控制系統(tǒng),可以對道路系統(tǒng)中的交通狀況、交通事故、氣象狀況和交通環(huán)境進行實時的監(jiān)視,依靠先進的車輛檢測技術(shù)和計算機信息處理技術(shù),獲得有關(guān)交通狀況的信息,并根據(jù)收集到的信息對交通進行有效控制,如信號燈控制、發(fā)布誘導信息等,乃至根據(jù)手機定位、微博留言等數(shù)據(jù)對于交通系統(tǒng)的性能進行評估和調(diào)整[21-22]。
然而即便如此,全球每年的交通事故率依然高居不下。交通效率和安全問題始終困擾著交通管理者和出行者。其重要原因之一在于交通信號控制仍然存在相當?shù)木窒扌浴?/p>
1)交通信號燈控制范圍有限。通常來說,信號燈一般只布設(shè)在道路交叉口和快速路出入口匝道這些容易出現(xiàn)路權(quán)沖突導致碰撞的位置。可事實上,路權(quán)沖突導致的交通事故卻可能出現(xiàn)在道路任何位置,并不局限在有信號燈控制的道路范圍內(nèi)。
2)交通信號燈對路權(quán)的定義仍有模糊和不合理之處。其中最著名的應該就是所謂的「黃燈時兩難境地」(Yellow interval dilemma),即,當車輛以一定速度接近交叉口時恰逢黃燈,如果急停則剎車距離不夠,還可能會對后車造成安全隱患;如果硬闖則面臨闖紅燈的危險,使得駕駛員陷入無所適從的兩難境地 [23]。雖然研究者提出了多種改變交通信號燈設(shè)置的算法,但依然不能杜絕「黃燈時兩難境地」的出現(xiàn)。
3)交通信號燈的信息交互方式仍有值得改進之處。在逆光、雨雪、濃霧、沙塵等視線不佳場景和惡劣天氣下,駕駛員很難及時分辨信號燈狀態(tài),無形中增加了交通事故發(fā)生概率 [24]。
4)交通信號燈的配時優(yōu)化是一大難題。配時不合理,會導致道路資源時空利用率降低,特別是在交通流不平衡的交叉口尤為明顯。即使采用感應式控制和各種新型智能算法[25-27],在解決如下三個挑戰(zhàn)之前,也難以做到路權(quán)的精確分配,道路資源仍有相當程度的浪費:
挑戰(zhàn)之一是如何精確地確定車輛到達某一路口的時間,以便采取合理的控制信號;
挑戰(zhàn)之二是需要在交叉口和快速路匝道之外,將路權(quán)的分配和通訊貫穿于駕駛?cè)^程;
挑戰(zhàn)之三是將道路上的連續(xù)多個車輛視為流體之后,不能精確衡量和控制每個車輛的運動,未能充分利用有限的道路資源。
傳統(tǒng)交通控制面臨的上述難題,亟待新概念、新技術(shù)來破解。
5. 車路協(xié)同時期
最近 10 多年飛速發(fā)展的車聯(lián)網(wǎng)(Vehicle to Everything,V2X)技術(shù),以及車路協(xié)同系統(tǒng)的興起和發(fā)展為上述前兩個問題的解決帶來新的契機。
車-車之間(Vehicle to Vehicle,V2V)、車-路之間(Vehicle to Infrastructure,V2I)的信息交互和協(xié)同控制,使得每一輛車都可以實時感知到周邊車輛的運動信息、交叉口信號燈狀態(tài)以及道路環(huán)境信息;同時,車輛自身信息也能夠通過通信手段傳遞給周邊車輛和路側(cè)設(shè)備。這意味著我們能更加合理和準確地決定路權(quán) [28]。
首先,全時空感知的信息獲取使得我們減少乃至避免了誤判某一特定時空區(qū)域發(fā)生碰撞的可能。路權(quán)分配的粒度大大細化,路權(quán)分配將覆蓋整個道路時空,解決任意時間和空間的路權(quán)分配問題。
其次,交通控制系統(tǒng)可以借助車路協(xié)同實時獲取車輛的位置,運行速度等信息,進一步優(yōu)化計算信號燈的配時[29-31]。
圖 3 2014 年 IEEE 智能交通年會上中國多家高校和企業(yè)聯(lián)合演示的基于車路協(xié)同技術(shù)的交通信號提示和車輛速度導引控制
再者,我們可以在沒有信號燈的地方,將路權(quán)歸屬信息迅速傳達給交通參與者。車路協(xié)同技術(shù)的發(fā)展使得人、車、路等交通要素之間形成一張巨大的網(wǎng)絡(luò),信息感知、信息交互和信息共享無處不在 [32-34]。路權(quán)的提示將變得更加直觀易解,人類駕駛員的負擔將減到最低。圖 3 展示的車路協(xié)同系統(tǒng)能將信號燈狀態(tài)無線傳輸給附近車輛,以便駕駛員調(diào)整車輛速度,以最舒適的方式通過交叉路口。
6. 無人駕駛時期
最近十幾年持續(xù)不斷方興未艾的無人車(Automated Vehicles)和自動駕駛(Autonomous Driving)技術(shù)的出現(xiàn) [35-36],為第 5 節(jié)中提到的最后一個問題的解決帶來了可能。
在未來的 50 年中,傳統(tǒng)的交通控制將逐漸被更為精細的基于每輛車實時動態(tài)信息的自組織協(xié)同駕駛(Cooperative Driving)所替代,實現(xiàn)路權(quán)分配的「協(xié)同利用」。對于路口交通控制而言,我們的決策變量變?yōu)槊總€通過路口車輛的運動時空軌跡。基于這些時空軌跡,我們可以方便地定義控制目標函數(shù)為全體車輛的通過時間最少,或者平均通行時間更短等。而車輛之間的避撞要求也可以直接從時空軌跡的相對位置上設(shè)置 [37-43]。雖然看起來此時的控制問題可能過于復雜,但研究表明,協(xié)同駕駛問題的核心在于決定車輛通過路口的時間順序,確定這一順序后,整個問題可以迎刃而解。仿真表明,協(xié)同駕駛在交通壓力不至于導致路口過飽和的情況下,能夠顯著提高路口的通行能力[41]。
從控制的本質(zhì)上來看,傳統(tǒng)的交通控制屬于被動的反饋控制。控制系統(tǒng)被動的感知車流到達的變化,僅僅通過施加信號燈控制以期從當前的系統(tǒng)狀態(tài)發(fā)展到理想的狀態(tài)。而協(xié)同駕駛是前饋控制和反饋控制相結(jié)合,通過預先規(guī)劃車輛軌跡來更好導向系統(tǒng)理想狀態(tài) [44-46]。
雖然囿于計算能力,目前的協(xié)同駕駛尚只考慮獨立路口的交通控制,路口和路口之間的協(xié)同駕駛尚未引起研究者的廣泛興趣。但研究者正在探討未來實現(xiàn)提前規(guī)劃和控制路面上行駛的每一輛車從出發(fā)地到目的地的整個軌跡。在完全掌握車輛信息和道路環(huán)境信息的前提下,控制中心可以計算出每輛車具體到每一秒鐘的最優(yōu)行駛路線,并讓每輛車準確的執(zhí)行。因為人不再參與駕駛活動,也就不存在拒不執(zhí)行調(diào)度或者產(chǎn)生延遲等行為,交通有可能變得更加流暢和安全。此時,局部時空的路權(quán)分配將從「集中式」指派再次回歸到「分布式」協(xié)作,實現(xiàn)螺旋式演進發(fā)展。
這里,我們可以將地面交通控制與公認于 1936 年創(chuàng)立的空中交通控制進行一個有趣的對比。80 多年來,國內(nèi)外主要的干線航空和設(shè)想的未來地面交通一樣,每架飛機基本按照預先設(shè)置好的固定軌跡飛行,大部分飛行時間由機載系統(tǒng)駕駛。但空中管理依賴以人為主劃定少量航線,在近場時主要依靠人類管理員來進行管制 [47]。這一方式導致管理效率不高,時有危險發(fā)生。美國因此決定啟動 Next Gen 計劃開發(fā)主要由機器自動管理的空中交通控制系統(tǒng)。而地面交通控制系統(tǒng)很早就進入了主要由機器自動管理的時代。不過無人車有待落地普及,尚未達到完全預先設(shè)定每輛車的運動,實現(xiàn)全程自動駕駛的過程。
此外,由于在很多大城市中,道路供給資源始終小于道路行駛需求。因此,研究者們研究了擁堵收費、投票獲取路權(quán),或者可交易電子路票等多種方式來 [48-50] 決定車輛是否能夠獲得駛?cè)胩囟▍^(qū)域或路段的路權(quán)。在車輛網(wǎng)和無人駕駛技術(shù)成熟之后,這些方法的實施也將變得非常方便。
不僅如此,完全定制化的路權(quán)也將使得特權(quán)出行和共享出行變得更為簡捷。我們可以動態(tài)地為特殊車輛(救火車、救護車等)或者載有多名乘客的車輛(High-occupancy vehicle,HOV)設(shè)置更高的路權(quán),以方便其出行。這比設(shè)置靜態(tài)的載有多名乘客車輛的專用車道(HOV Lane)[51] 要節(jié)省更多的道路資源。
綜合來看,今后 50 年中實施上述想法首先需要無人駕駛技術(shù)進一步的完善,通過測試 [52],上路普及。這一點與本文主題較遠,暫不在本文做過多論述。其他的主要困難包括:
1)在較長的一段時間中,有人駕駛車輛和無人駕駛車輛混行在道路上,如何保證駕駛員或者無人車誤解各自的意圖而發(fā)生碰撞是值得深入研究的課題。同時,混行交通也為道路交通管理帶來了新的挑戰(zhàn),需要構(gòu)建與之相適應的交通控制策略。
2)計算的復雜性隨著所需要考慮的車輛數(shù)目急速增長,如何找到合適的算法找到較優(yōu)的可行解是今后研究的熱點。目前來看,自組織式的交通系統(tǒng)分布式控制方法 [53] 具有較強的抗系統(tǒng)崩潰性失效的能力,可能是較優(yōu)的選擇。
3)今后的交通系統(tǒng)將越來越依賴通信的實時性和可靠性來保障路權(quán)計算的合理最優(yōu)以及路權(quán)分配的及時準確。同時交通參與者的隱私性也需要得到更仔細的考量。這方面也將是今后關(guān)注的熱點
7. 總結(jié)
回溯以往,我們不難發(fā)現(xiàn),地面交通控制圍繞著如何公平高效地決定路權(quán)歸屬和如何有效地將路權(quán)歸屬信息傳達給交通參與者這兩方面展開研究和實踐,探索和實施了多種路權(quán)分配方式。
過去的 100 多年中,交通信號控制是定義道路通行權(quán)分配的重要工具。但隨著車路協(xié)同理念的出現(xiàn)和車聯(lián)網(wǎng)、無人駕駛等相關(guān)技術(shù)的日益成熟,正在重新定義交通控制。由傳統(tǒng)固定配時信號控制到感應式信號控制,再到車路協(xié)同環(huán)境下的交通感知與控制,我們完成了從宏觀到微觀、從路權(quán)粗放式管理到道路資源全時空精細化分配的進階。未來交通系統(tǒng)中的很多新型技術(shù),包括共享出行、可交易路權(quán)等,都將和這一變革聯(lián)系和交互,共同改變?nèi)藗兾磥淼某鲂蟹绞?[54-56]。
未來交通系統(tǒng)將逐漸實現(xiàn)路面上沒有交通信號燈設(shè)施,但每個交通參與者都在合作中有序運行的形態(tài)。簡言之,就是「一路無燈、處處暢通」。這看似科幻的場景,必將在未來的50年中顛覆已有的交通控制方式,成為人工智能、自動化、控制理論、智能交通、智能汽車等多個領(lǐng)域的交叉研究熱點。
-
智能交通
+關(guān)注
關(guān)注
12文章
820瀏覽量
44282 -
無人車
+關(guān)注
關(guān)注
1文章
307瀏覽量
36839 -
自動駕駛技術(shù)
+關(guān)注
關(guān)注
4文章
97瀏覽量
15196
原文標題:地面交通控制的百年回顧和未來50年展望
文章出處:【微信號:Recycle-Li-Battery,微信公眾號:鋰電聯(lián)盟會長】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
端側(cè)/邊緣AI盛宴正在成局——GPU成為關(guān)鍵推手

智能交通的關(guān)鍵技術(shù)支撐
Arm 2024年度精彩回顧
回顧OpenHarmony社區(qū)2024年度精彩瞬間
天合光能210產(chǎn)業(yè)化之路回顧與展望
回顧2024年度潤和軟件與openEuler的精彩瞬間
華太電子2024年度精彩回顧
冰雪路面交通氣象站的功能與應用
蘋芯科技:邊緣和端側(cè)AI算力或成2025年重要增長點,存算一體架構(gòu)崛起是必然趨勢

回顧存儲發(fā)展的過去與現(xiàn)在
eVTOL發(fā)展挑戰(zhàn)不斷,互連技術(shù)或成破局關(guān)鍵

eVTOL發(fā)展挑戰(zhàn)不斷,互連技術(shù)或成破局關(guān)鍵
我在京東做產(chǎn)研 校招 2 年,個人角度(成長)回顧 - 行且知






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論