 電機控制系統 - 波特圖和穩定性
電機控制系統 - 波特圖和穩定性
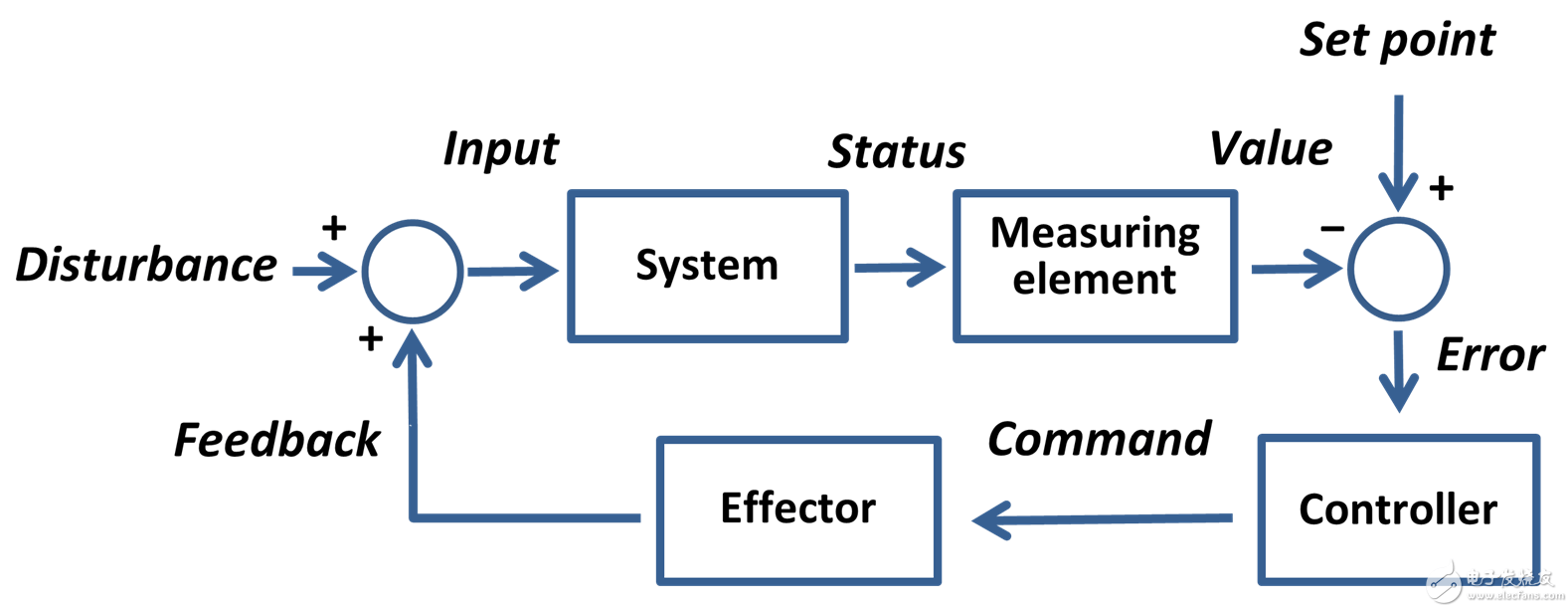
什么是控制系統?控制系統將其系統的未來狀態改變為更理想的結果。我們經常使用反饋控制系統(也稱為閉環控制),將命令的結果反饋到控制系統。特別是我們正在尋找命令與所需響應之間的錯誤。如果輸出狀態沒有反饋到控制系統中,則稱為開環系統。
我最近在關于調整電機和理解波特圖的機器人論壇的機器人上有一個問題。許多電機控制軟件包都帶有調諧工具,可以執行諸如生成波特圖等事情。這篇文章主要是我對這個問題的回答的一個副本。
通過觀察電機的運動,系統的頻率可能難以可視化。系統的頻率是當你轉換時域信號(即你看電機運動隨著時間的推移),并使用傅里葉變換將其轉換到頻域。一旦將信號轉換為頻域,我們可以使用波德圖。波德圖幫助我們可視化控制系統響應的(傳遞函數)以驗證其穩定性。
隨機注:
假設您知道傳遞函數,在開環系統中,您可以使用根發現(即查找使方程等于0的值)來檢查穩定性(通過確保所有根都是負實際值) 。對于基于反饋的閉環系統,我們可以修改上述內容并用計算機解決(因為數學很難),或者使用Bode圖幫助更好地理解控制系統。(我還應該指出,你可以使用Routh-Hurwitz來避免復雜的數學,這將需要另一個職位......)
一般情況下,波特圖顯示輸入控制信號的相位和增益(幅度),直到它到達頻域的輸出(指令)。
波德圖的部分
增益是輸入信號和最終命令之間的值變化。如果你的系統沒有增益也沒有損失,那么你將得到一條0dB增益的直線水平線。您通常會在幅度圖的右側看到增益下降(減少)。
直到它開始下降的頻率范圍越大,表明系統在更多條件下會保持穩定。主曲線中的隨機顛簸和曲線通常是不穩定的跡象。如果增益增加到無窮大(即大數值),這往往是不穩定的跡象,并且您需要重新考慮控制器設置!如果您有增益尖峰,請參閱下面的過濾部分。
快速提醒:從原始時域信號幅度獲得以dB為單位的增益:
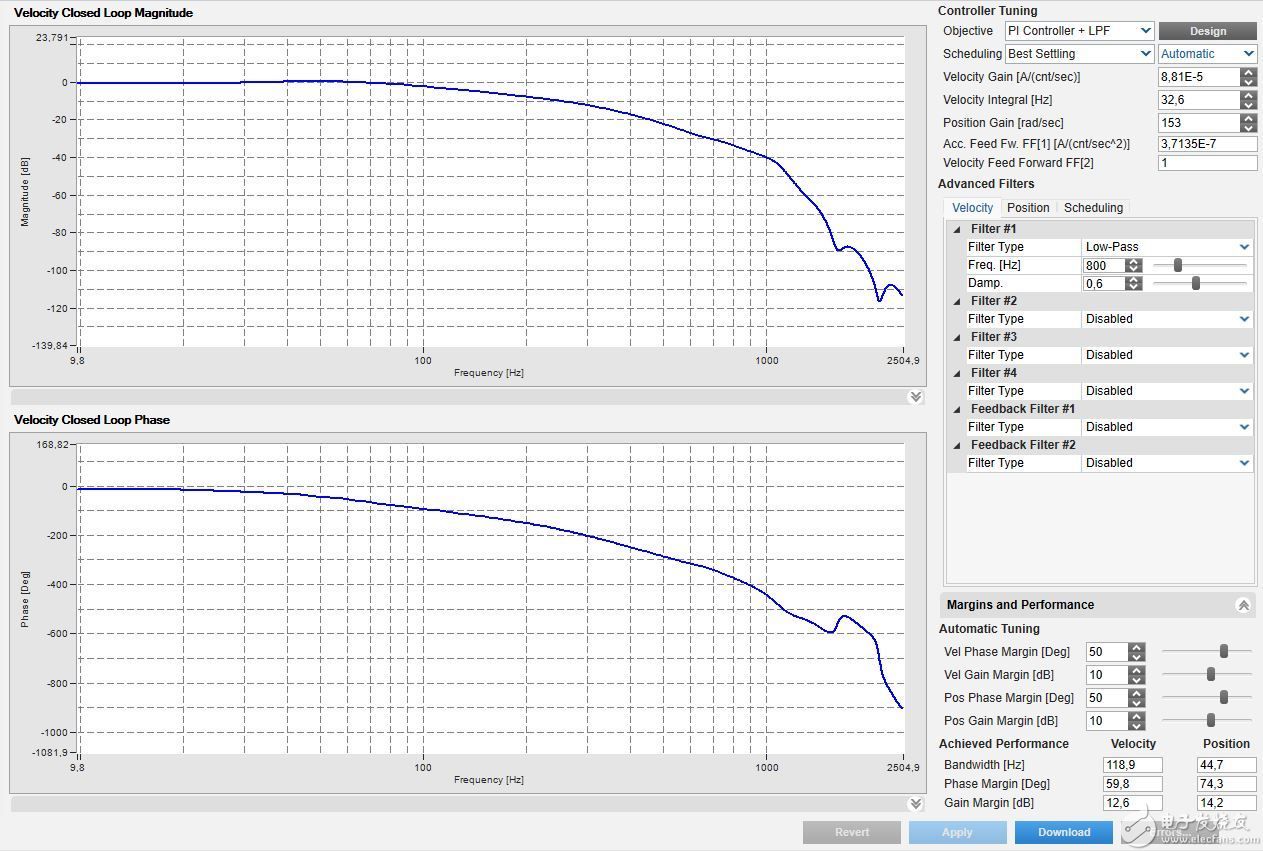
帶寬是曲線頂部的區域,直到幅度降低-3dB。所以在上面的圖片中,您可以看到曲線在100Hz左右下降。所以你的系統的帶寬大約是100Hz。該工具實際上在圖像右下方的框中顯示了118.9Hz的精確帶寬值。控制過去118.9Hz將會緩慢或無響應。
階段描述了輸入信號和輸出命令之間的時間偏移。360階段是單周期。所以如果你有一個1KHz(即1000Hz)的指令信號,圖表中的每個360度將代表1/1000秒(轉換頻率到時間)或1毫秒。您可以在相圖中看到,一旦超過帶寬,所需的輸入信號將傳輸到輸出信號需要更長的時間。
過濾特定頻率
各種濾波器(低通,陷波等)通常用于消除特定頻率的諧振。例如,如果您旋轉電機,并且您在特定頻率看到事情開始劇烈震動,則可以添加一個濾波器,以便在該頻率下增益得以降低。一般來說,您應該調整一個沒有過濾器的電機,并且只在需要時添加過濾器。
驗證控制參數
通過查看輸出波形,可以驗證選定的增益是否良好(在時域中);這有時被稱為示波器模式。如果在運動開始時有很多初始振鈴(不斷變化)或過沖,您的收益可能會很高。如果初始命令正在慢慢達到所需的輸出,則可能需要增加增益。
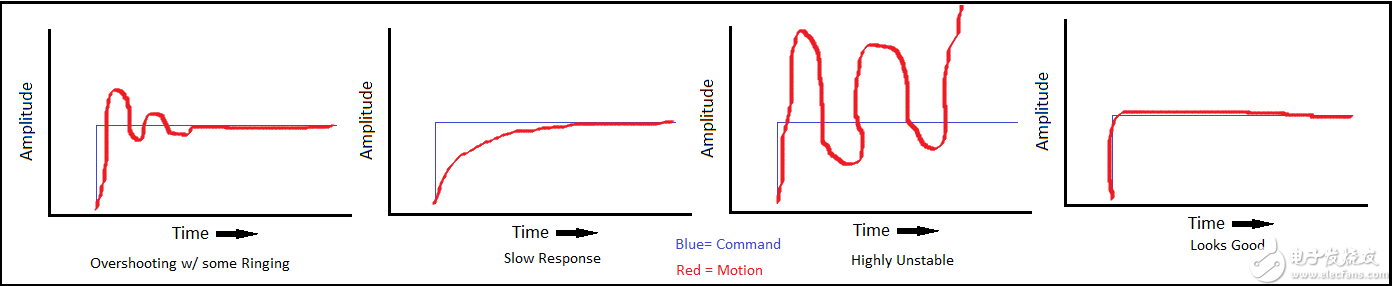
顯示常見調整問題的曲線,然后是良好的響應曲線。藍線是命令,紅線是實際的電機輸出。
在上圖中,我們可以看到:
1.輸出運動超調,伴隨著一個小信號響應,因為它穩定到命令。有點超調通常很好,但我們盡可能減少過沖,同時還有一個響應系統。
2.輸出響應慢。我們可能想要一個更快的響應,這樣系統就不會很慢了。當你讓系統不那么慢時,你經常會增加過沖和潛在的不穩定性。
3.高度不穩定。從一堆振蕩開始,然后是大量的指令輸出。我們想要避免這一點!
最后,這個最右邊的情節看起來不錯。電機輸出直接位于指令運動的頂部,有一個非常輕微的過沖(如果你看起來很近)。
-
電機控制
+關注
關注
3556文章
1930瀏覽量
270359
發布評論請先 登錄
相關推薦
免費領取基于 DSP的直流無刷電機控制系統探究
質量視角下的系統穩定性保障--穩定性保障常態化自動化實踐

奈奎斯特圖分析怎么判斷穩定性啊?
為什么要對控制系統進行整定
鳳凰動力舵輪驅動輪的穩定性如何影響AGV的運行效率和穩定性






 工商網監
工商網監
評論