") 自動駕駛毫米波雷達之間會相互干擾嗎?
自動駕駛毫米波雷達之間會相互干擾嗎?
[首發(fā)于智駕最前沿微信公眾號]隨著智能網(wǎng)聯(lián)汽車的發(fā)展,交通環(huán)境感知技術(shù)(包括毫米波雷達、激光雷達和攝像頭等)日益成為自動駕駛的核心組成部分。在這些傳感器中,毫米波雷達因其全天候、高精度、抗干擾能力強等優(yōu)點,被廣泛應(yīng)用于自動駕駛和高級輔助駕駛系統(tǒng)。近年來,量產(chǎn)車型上毫米波雷達的裝配率不斷提高,小鵬P7就配備了5顆毫米波雷達,理想ONE配備了4顆毫米波雷達,而華為支持的極狐阿爾法S高階版更是搭載了6顆毫米波雷達。車輛越多、雷達部署越密集,毫米波頻段的電磁信號越趨“擁擠”,這就帶來了雷達互相干擾的潛在風(fēng)險。在之前和大家討論激光雷達是否會相互干擾時,就有小伙伴提問毫米波雷達之間是否會相互干擾,今天智駕最前沿就和大家聊聊這個話題。

毫米波雷達的工作原理
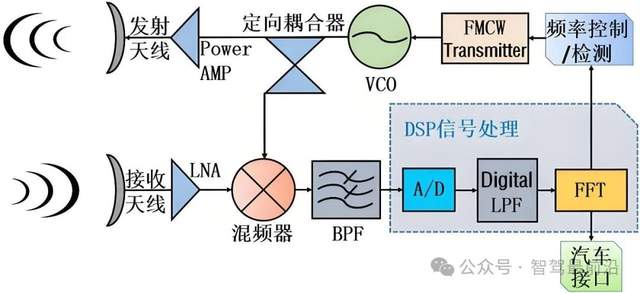
在聊毫米波雷達是否會相互干擾前,我們先了解下毫米波雷達是如何工作的。毫米波雷達其實是一種利用高頻電磁波來測量周圍目標(biāo)的傳感器。它通過天線發(fā)射毫米波(波長通常在1 mm~10 mm),然后接收目標(biāo)反射回來的回波信號。雷達系統(tǒng)根據(jù)發(fā)射脈沖和接收回波之間的時間差來計算目標(biāo)與車輛之間的距離;如果目標(biāo)在運動,反射波的頻率會發(fā)生多普勒偏移,雷達也能據(jù)此測量目標(biāo)的相對速度和行駛方向。經(jīng)過處理后,毫米波雷達可以快速獲取汽車包括障礙物的位置、速度、角度等周圍環(huán)境信息。與攝像頭不同的是,毫米波雷達幾乎不受光照和天氣影響,即使在夜間、雨雪、霧霾等惡劣條件下也能穩(wěn)定工作。

多車環(huán)境下可能產(chǎn)生的雷達干擾現(xiàn)象
先說結(jié)論,當(dāng)?shù)缆飞隙噍v自動駕駛汽車同時運行、各自發(fā)射毫米波信號時,還真會出現(xiàn)雷達互相干擾的情況。這些干擾可分為兩類,即雜波(拒絕式)干擾和欺騙式干擾。
雜波干擾指的是一個雷達接收到了其他雷達發(fā)射的強信號,從而提高了本底噪聲。如當(dāng)兩輛車迎面而行時,如果它們的雷達信號在時間上不重疊但處于同一頻段,強烈的干擾信號就會抬高受害雷達的噪聲底線,導(dǎo)致一些小目標(biāo)(雷達散射截面小的物體)消失在噪聲中。
那什么是欺騙式干擾呢?如果兩個雷達的波形恰好在時間上同步,但存在微小的延遲,就會在一定的距離處產(chǎn)生欺騙性假目標(biāo),使雷達認(rèn)為前方有一個并不存在的障礙物。此外,在密集路況下,多個雷達工作頻帶重疊也會導(dǎo)致信號疊加,使雷達產(chǎn)生誤判或漏判。總之,多車環(huán)境下的雷達干擾包括底噪抬升、虛假回波和重疊信號等現(xiàn)象,這些都可能讓雷達誤把其他車輛的信號當(dāng)成目標(biāo)回波或忽略真實目標(biāo)。

干擾會帶來什么問題?
雷達干擾會直接影響自動駕駛系統(tǒng)對環(huán)境的判斷能力。由于噪聲抬升或假目標(biāo)的出現(xiàn),雷達可能漏檢真實障礙物,也可能對虛假目標(biāo)作出反應(yīng)。具體表現(xiàn)在幾個方面,車輛對真實車輛、行人或障礙物的探測距離變短,動態(tài)檢測范圍縮小;同時出現(xiàn)誤報警或忽警的情況。這些干擾將嚴(yán)重降低系統(tǒng)的可靠性和安全性。就曾有一項測試,研究人員利用干擾設(shè)備干擾特斯拉汽車前向雷達,使車輛在距離一堆泡沫障礙物約5米時“看不見”前方物體,沒有及時剎車而加速撞上了障礙物。該事件表明,一旦雷達喪失目標(biāo)感知能力,自動駕駛輔助系統(tǒng)就可能失靈,帶來嚴(yán)重的安全隱患。

當(dāng)前主流廠商的應(yīng)對方案
針對毫米波雷達互相干擾的問題,芯片廠商和整車廠商已經(jīng)提出了多種緩解策略。一種常用做法是在發(fā)射參數(shù)上隨機化,比如隨機改變雷達的啁啾信號斜率或起止頻率,以減少不同車輛雷達信號偶然同步的概率;還可以對可用頻譜進行分配,使周圍雷達盡量在不同頻率段工作。在硬件上,使用更窄的天線波束和電子掃描也能降低干擾風(fēng)險,因為窄波束會減少接收到旁瓣干擾的機會。在信號處理方面,也在利用高級算法來識別和去除干擾。如短時傅里葉變換(STFT)等時頻分析方法可以將雷達回波分解到時頻域,從而更容易濾除快速變化的干擾信號;而對發(fā)射的FMCW波形進行相位編碼可以利用獨特的碼序特征來抑制假目標(biāo),使雷達對欺騙式干擾具有更強的抵抗力。除此之外,車載雷達系統(tǒng)通常與攝像頭、激光雷達等傳感器融合使用,當(dāng)雷達數(shù)據(jù)不確定時可以借助其他傳感器進行交叉驗證,從而提升整體感知的魯棒性。
國內(nèi)外廠商也在積極布局更高性能的毫米波雷達以提升抗干擾能力。特斯拉在其HW4.0硬件平臺中重新加入了高精度4D成像毫米波雷達,以增強對障礙物的識別能力。國內(nèi)諸如小鵬、理想、蔚來等車型已經(jīng)普遍采用多顆雷達的組合方案提升環(huán)境感知。此外,還有越來越多包括大陸、采埃孚、博世、安波福等傳統(tǒng)Tier1,以及Waymo、Mobileye、華為等自動駕駛解決方案提供商等推出4D毫米波雷達產(chǎn)品(如華為4D成像雷達采用12T24R陣列,可實現(xiàn)高分辨率廣視角探測),從而確保感知的精確性。還有很多研究提議通過標(biāo)準(zhǔn)化協(xié)議或車載通信,使雷達傳感器之間實現(xiàn)時序或頻率的協(xié)調(diào),甚至將雷達與5G/6G通信功能融合,使車輛之間共享傳感信息來避免互相干擾。

未來展望
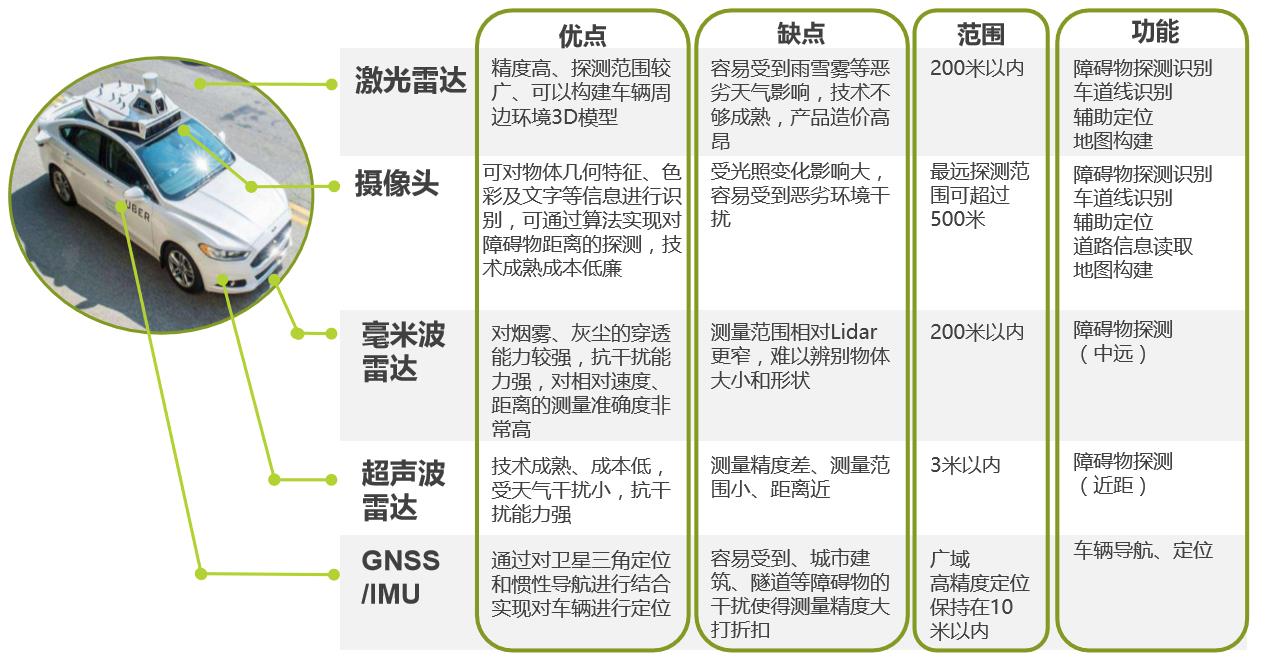
未來,毫米波雷達技術(shù)將繼續(xù)向4D成像方向發(fā)展,并與其他傳感器協(xié)同工作。一方面,4D毫米波雷達在傳統(tǒng)三維信息(距離、方位、速度)的基礎(chǔ)上增加了高度維度,可以輸出類似激光雷達的點云信息。與激光雷達相比,4D毫米波雷達成本更低,且同樣具有全天候工作能力(能夠穿透雨、雪、霧霾),因此被視為能在更多場景下補充激光雷達的短板。另一方面,無論是頂級車企還是研究機構(gòu),都認(rèn)為未來多傳感器融合才是主流方向。毫米波雷達、攝像頭和激光雷達各有優(yōu)劣,攝像頭可識別色彩與紋理,毫米波雷達在惡劣天氣下穩(wěn)定可靠,激光雷達提供高密度點云。幾種傳感器組合使用,能夠相互補充。就有分析認(rèn)為毫米波雷達雖然可以生成點云,但分辨率目前還難以與高線束激光雷達相比;因此毫米波雷達和激光雷達更可能互為補充,共同提升自動駕駛的安全性。總之,隨著4D毫米波雷達、激光雷達和攝像頭等傳感器技術(shù)的共同進步,以及計算能力和算法的提升,未來自動駕駛系統(tǒng)的環(huán)境感知將更加精準(zhǔn)可靠。

最后的話
毫米波雷達作為自動駕駛汽車的關(guān)鍵傳感器,具有全天候、精準(zhǔn)測距和速度測量的獨特優(yōu)勢。在大量自動駕駛車輛同時運行的場景中,毫米波雷達之間的互相干擾問題確實存在,這可能導(dǎo)致目標(biāo)探測失敗或虛假目標(biāo)出現(xiàn),從而影響系統(tǒng)安全。隨著毫米波雷達技術(shù)(如4D成像雷達)的升級以及相關(guān)標(biāo)準(zhǔn)的制定,多車環(huán)境下的雷達干擾風(fēng)險將被進一步降低。可以預(yù)見,在自動駕駛普及進程中,毫米波雷達依然會發(fā)揮重要作用,其干擾問題雖不容忽視,但通過技術(shù)創(chuàng)新與產(chǎn)業(yè)協(xié)作是可以有效控制的。
審核編輯 黃宇
-
傳感器
+關(guān)注
關(guān)注
2564文章
52722瀏覽量
764712 -
自動駕駛
+關(guān)注
關(guān)注
788文章
14245瀏覽量
169940 -
毫米波雷達
+關(guān)注
關(guān)注
107文章
1090瀏覽量
65211
發(fā)布評論請先 登錄
淺析車載毫米波雷達
毫米波雷達(一)
77G毫米波雷達在 ADAS 功能和 AD 自動駕駛中的角色和功能
基于毫米波傳感器的自動泊車系統(tǒng)該怎樣去設(shè)計?
毫米波/激光/超聲波雷達的區(qū)別 精選資料推薦
漫談車載毫米波雷達歷史
用于ADAS系統(tǒng)和自動駕駛車輛中雷達的毫米波傳感器
ADAS系統(tǒng)無人駕駛的眼睛毫米波雷達
自動駕駛使得毫米波雷達迎來百億市場 中小廠商如何搶奪市場
腦洞大開!除了自動駕駛,毫米波雷達還能這么用!
毫米波雷達模塊在自動駕駛系統(tǒng)中的關(guān)鍵功能
自動駕駛傳感器中如何現(xiàn)在激光雷達和毫米波雷達?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論