 AGV小車中的動態路徑規劃算法揭秘
AGV小車中的動態路徑規劃算法揭秘
在現代倉儲、物流和制造業中,自動導引車(AGV)的身影日益普遍。它們如同勤勞的工蟻,在復雜的環境中自主穿梭,高效地完成物料搬運任務。而支撐AGV實現智能導航的核心技術之一,便是路徑規劃。特別是當環境并非一成不變時,動態路徑規劃能力就顯得至關重要。本文將深入探討幾種主流的動態路徑規劃算法(如A、Dijkstra、RRT等),并解析它們如何在AGV行業中大顯身手。
為何需要動態路徑規劃?
1.簡介
傳統的靜態路徑規劃假設環境是完全已知的,并且在AGV執行任務期間保持不變。然而,現實世界充滿了變數:
●突然出現的臨時障礙物(如掉落的貨物、行人或其他車輛)
●變化的交通管制區域
●需要臨時調整的目標點或任務
在這些情況下,AGV需要具備實時感知環境變化并快速重新規劃路徑的能力,這就是動態路徑規劃的用武之地。它賦予了AGV“隨機應變”的智慧,確保其在復雜多變的環境中依然能夠安全、高效地運行。
主流路徑規劃算法解析
1.Dijkstra算法:全局最優的基石
Dijkstra算法是一種經典的圖搜索算法,用于查找圖中單個源點到所有其他頂點的最短路徑。
●核心思想:
從起點開始,像水波紋一樣向外擴散。每次訪問當前距離起點最近的未訪問節點,并更新其鄰居的距離。
●過程:
○初始化: 起點距離設為0,其他點設為無窮大。創建待訪問節點的優先隊列(按距離排序)。
○迭代:從隊列取出距離最小的節點 u。
○松弛:對 u 的每個鄰居 v,若經 u 到 v 的路徑更短,則更新 v 的距離并加入隊列。
○標記:標記 u 為已訪問。
○重復:直到目標節點被取出,或隊列為空。
●AGV小車應用:
○優點: 保證找到全局最短路徑(邊權非負時)。
○缺點: 搜索范圍大,無方向性,計算效率較低(尤其在大地圖)。動態障礙物需重算全局路徑,實時性差。
○定位: 常作其他算法(如A*)基礎,或在環境簡單時使用。

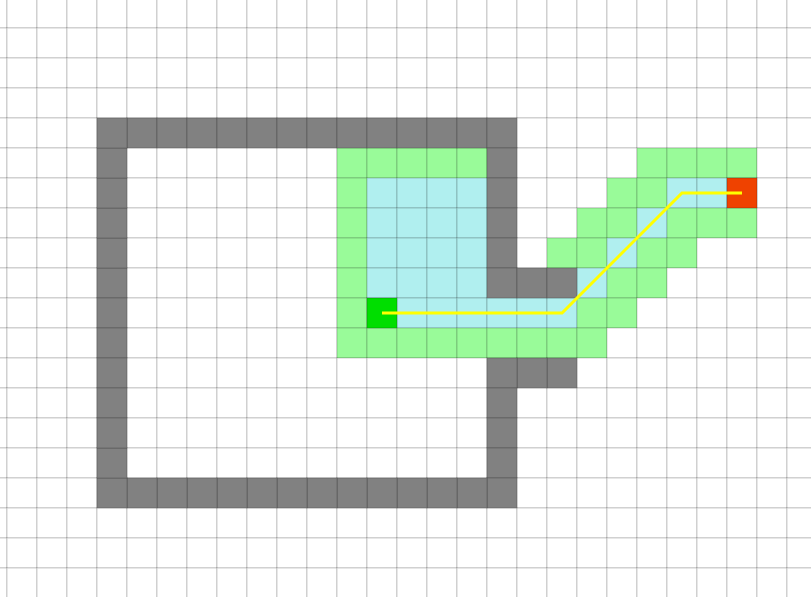
↑Dijkstra算法從起點開始,像波紋一樣逐層探索節點
2.A* 算法:啟發式的智慧導航
A*(A-Star)算法是對Dijkstra算法的優化,它引入了啟發式信息來引導搜索方向,從而更快地找到目標。
●核心思想: 選擇下一個訪問節點時,同時考慮:
○g(n): 從起始點到節點n的實際路徑成本。
○h(n): 從節點n到目標的估計成本(啟發函數,如曼哈頓/歐氏距離)。
○評估函數:f(n) = g(n) + h(n)
○關鍵要求:h(n)需滿足可采納性(估計值≤實際值)和一致性,以保證找到最優解。
●過程: 類似于Dijkstra,類似Dijkstra,但優先隊列按f(n)排序,優先擴展f(n)最小的節點,使搜索更有方向性地朝向目標。
●AGV應用:
○優點:在啟發函數滿足條件時,保證最優路徑且通常比Dijkstra效率高得多。廣泛用于AGV全局路徑規劃。
○缺點: 性能受啟發函數選擇影響;內存消耗可能大;環境頻繁變化時仍需重規劃。
○動態變種: 為應對動態環境,有D*, LPA*, D* Lite等算法。它們能在環境變化時增量式更新路徑(而非完全重算),顯著提高響應速度。D* Lite是AGV動態避障常用算法。
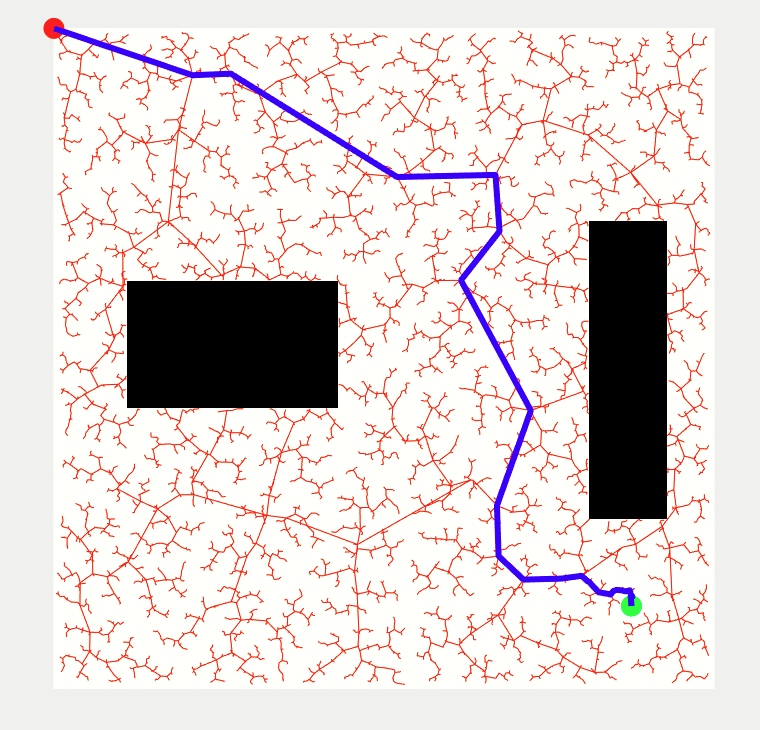
↑A*算法在啟發函數引導下,搜索區域更集中地朝向目標點擴展,而不是盲目擴散
3.RRT* 算法:擁抱隨機性與優化
RRT* (Rapidly-exploring Random Tree Star) 一種基于采樣的路徑規劃算法,特別適合高維空間和復雜約束(如車輛運動學)。
●核心思想:
通過在狀態空間隨機采樣,逐步生長一棵從起點開始的樹來探索空間。RRT*是RRT的優化版,增加了重連接 (Rewiring) 步驟,使路徑能漸近最優(采樣點越多,路徑越接近最優)。
●過程:
○采樣: 在狀態空間中隨機生成點 x_rand。
○查找最近鄰: 在樹中找到離 x_rand 最近的節點 x_nearest。
○擴展(Steer): 從 x_nearest 向 x_rand 延伸一個步長(避開障礙),得到新節點 x_new。
○選擇父節點(RRT* 特有):在 x_new 附近搜索節點,選擇能使 x_new 從起點總路徑成本最小的節點 x_min 作為其父節點(需無碰撞)。
○重連接(Rewire - RRT* 特有): 在 x_new 附近搜索節點,若通過 x_new 連接能降低其總路徑成本,則更新這些節點的父節點為 x_new。
○添加: 將 x_new 及其連接邊加入樹中。
○重復: 直到樹擴展到目標區域附近。
●AGV應用:
○優點: 處理高維狀態(姿態、速度等)和復雜約束能力強;不需要顯式環境地圖;概率完備性(存在路徑則最終能找到);RRT具有漸近最優性。
○缺點: 路徑非嚴格最優(除非無限采樣);路徑可能不平滑(需后處理);性能對參數敏感;收斂可能較慢。
○動態變種: 如 Dynamic RRT,通過移除/更新樹中與動態障礙物碰撞的部分并繼續生長來實現重規劃。
↑RRT*樹從起點開始隨機生長,探索空間
AGV小車中的動態路徑規劃實踐
# AGV避障應用場景
在實際的AGV應用中,通常不會只使用單一算法,而是結合使用:
1.全局路徑規劃:
使用A或其變種(如D Lite)或有時是優化后的Dijkstra,在已知的地圖上規劃出一條從起點到終點的全局最優或次優路徑。這條路徑通常比較宏觀。
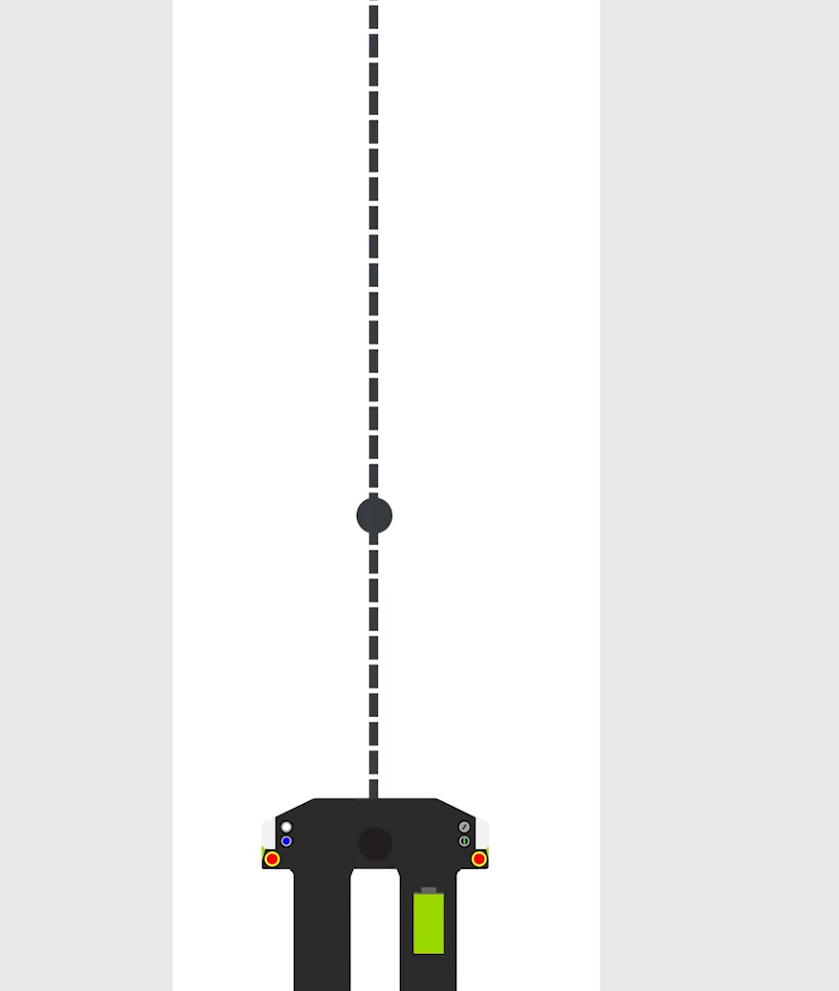
↑全局路徑(虛線)
2.局部路徑規劃/動態避障:
AGV小車在沿著全局路徑行駛時,通過傳感器(如激光雷達、攝像頭)實時感知周圍環境。一旦檢測到未預料到的障礙物(靜態或動態),局部規劃器(可能基于DWA - Dynamic Window Approach, TEB - Timed Elastic Band, 或快速重規劃的A/RRT變種)會介入,在全局路徑的指引下,生成一條短期的、安全的、符合車輛運動學約束的局部避障路徑。

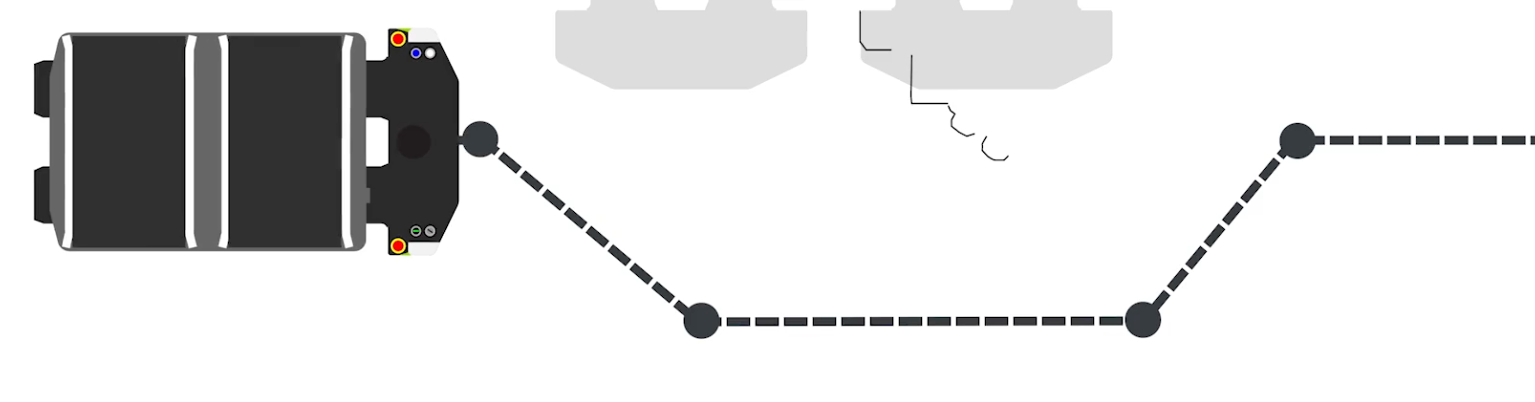
↑全局路徑(虛線)、突然出現的障礙物(黑色輪廓)
3.路徑跟蹤:
控制算法負責精確地沿著規劃好的路徑(無論是全局還是局部)驅動AGV行駛。
這種分層規劃的策略兼顧了全局最優性和局部實時性。D Lite等算法因其高效的增量式重規劃能力,在處理局部動態變化時表現尤為出色。RRT及其變種則在處理復雜環境和運動約束時更具優勢。
↑更改全局路徑
挑戰與未來趨勢
# 挑戰
盡管動態路徑規劃技術取得了長足進步,但在AGV行業應用中仍面臨挑戰:
●實時性要求: 尤其是在高速運行或密集交通場景下,算法需要在毫秒級完成計算。
●環境不確定性: 傳感器噪聲、定位誤差、動態障礙物預測的困難。
●多AGV協調: 避免沖突、死鎖,實現高效協作。
●復雜運動學約束: 考慮AGV的尺寸、轉彎半徑、加減速性能。
# 未來趨勢
未來,動態路徑規劃將朝著更智能、更高效的方向發展:
●機器學習融合: 利用強化學習、模仿學習等方法讓AGV自主學習更優的導航策略。
●預測性規劃: 預測其他動態障礙物(如行人、車輛)的意圖和軌跡,提前規劃。
●語義理解: 讓AGV理解環境中的語義信息(如“人行道”、“充電區”),做出更符合場景的決策。
●人機協作: 在人機共存的環境中,實現更安全、自然的交互與避讓。
# 結語
Dijkstra、A、RRT及其動態變種,是AGV小車動態路徑規劃算法庫的核心工具。它們如同AGV的“智能之眼”和“動態之舵”,使其能在復雜環境中靈活穿梭、高效作業。理解這些算法的原理和特點,對推動AGV技術乃至整個自動化領域的發展至關重要。隨著算法演進和算力提升,未來的AGV必將更加智能、可靠和高效。
作為智能物流解決方案領域的企業,AiTEN海豚之星始終聚焦“智慧工廠”場景,深度整合技術創新與行業需求,已為全球200余家制造業客戶提供全方位服務:依托全系列搬運機器人產品矩陣覆蓋多樣化搬運場景,自研行業級智能調度系統實現多設備高效協同,并通過覆蓋售前規劃、部署實施到運維優化的全生命周期服務體系,助力企業實現物流智能化轉型,持續賦能制造業數字化升級與高質量發展。
審核編輯 黃宇
-
機器人
+關注
關注
213文章
29563瀏覽量
211912 -
AGV
+關注
關注
27文章
1433瀏覽量
42087
發布評論請先 登錄
如何選擇合適的背負式AGV小車
AGV通信第2期 AGV集群智能路徑規劃解決方案

具身智能工業機器人路徑規劃算法成為破局關鍵
AGV小車在制造業中的應用有哪些?
AGV小車的工作原理是什么?
10W預算,不買傳統搬運設備買AGV小車,值嗎?
AGV小車VS人工搬運 選哪個 到底值不值?
如何選擇讓自己滿意(適合)的agv小車?純干貨分享

Agv小車有哪些車型?特點和優勢是什么?適用哪些場景?

AGV讀卡器在AGV自動搬運小車上應用方案

【科技前沿】MT6501磁編碼IC在智能AGV小車中的應用
工控機在AGV小車中的關鍵應用,適用于AGV小車的研華工控機

AGV系統設計解析:布局-車體-對接-數量計算-路徑規劃

AGV選型要點及步驟,保證企業選擇的AGV小車更實用






 工商網監
工商網監
評論