 直播 | GB/T 45086與ISO11451標準深度解讀研討會筆記請查收!
直播 | GB/T 45086與ISO11451標準深度解讀研討會筆記請查收!
?
6月12日,《德思特GB/T 45086與ISO11451標準深度解讀:GNSS、EMC與整車輻射抗擾標準實踐》線上研討會圓滿結束。感謝大家的觀看與支持!
在直播間收到一些觀眾的技術問題,我們匯總了熱點問題并請講師詳細解答,在此整理分享給大家,請查收!
高精度全場景融合定位技術分享
Q:RTK基站的覆蓋范圍是多少?
理論上,一臺架設良好的RTK基站可以為周圍半徑十幾公里內的移動站提供較好的修正參考,但隨著距離增加,修正性能會變差,主要因衛星信號傳播路徑差異導致。組網(如千尋等)能彌補單站覆蓋不足的問題。
Q:IMU和GNSS融合時如何對齊時間?
GNSS作為授時源,通過每秒參考脈沖同步IMU采樣。若IMU無外同步功能,需額外處理器采集數據并打時間戳,確保融合算法按時間戳處理數據。
面向GB/T 45086.1《車載定位系統技術要求及試驗方法》的GNSS測試深度解析
Q:城市峽谷場景怎么在測試里面實現?
可通過45086標準中的兩套天線模型(全場景和城市峽谷模型)加入接收機天線框架,或使用軟件一鍵設置實現不同環境(如開闊天空、郊區等)的模擬。
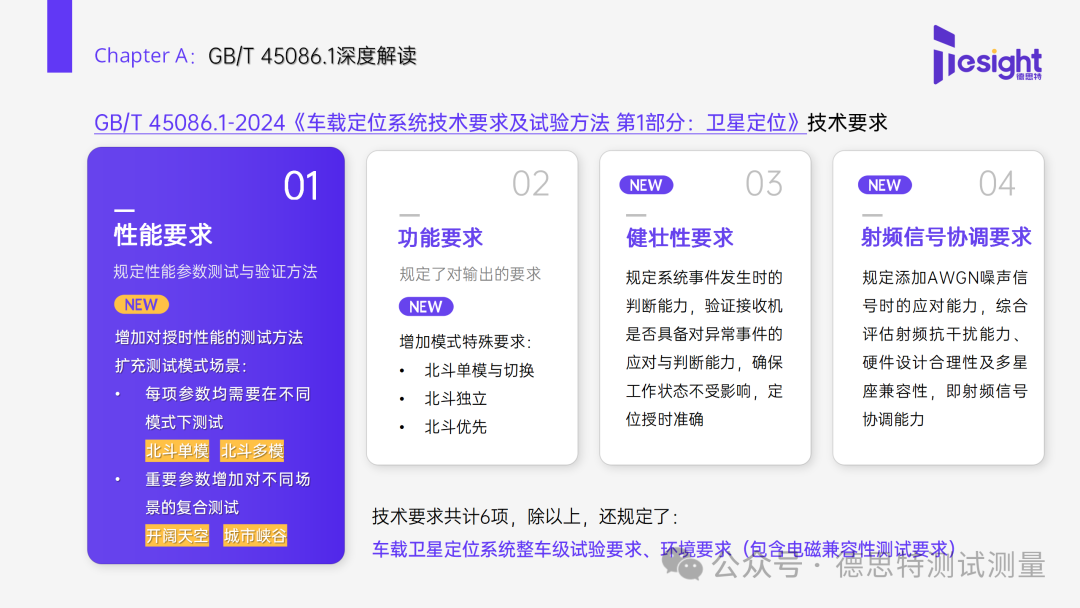
Q:單北斗測試是必要的嗎?
是必要的。未來ACS設計強制要求北斗兼容性(獨立或混合模式),且在大中華地區北斗性能優于其他星座,測試可確保實際使用精度。
Q:自動化測試怎么實現接收機冷啟動?
有兩種方法:(1)斷電重啟(通過程控電源發送SCPI命令)。(2)接收機廠商提供冷啟動命令時,通過串口/以太網發送命令觸發。
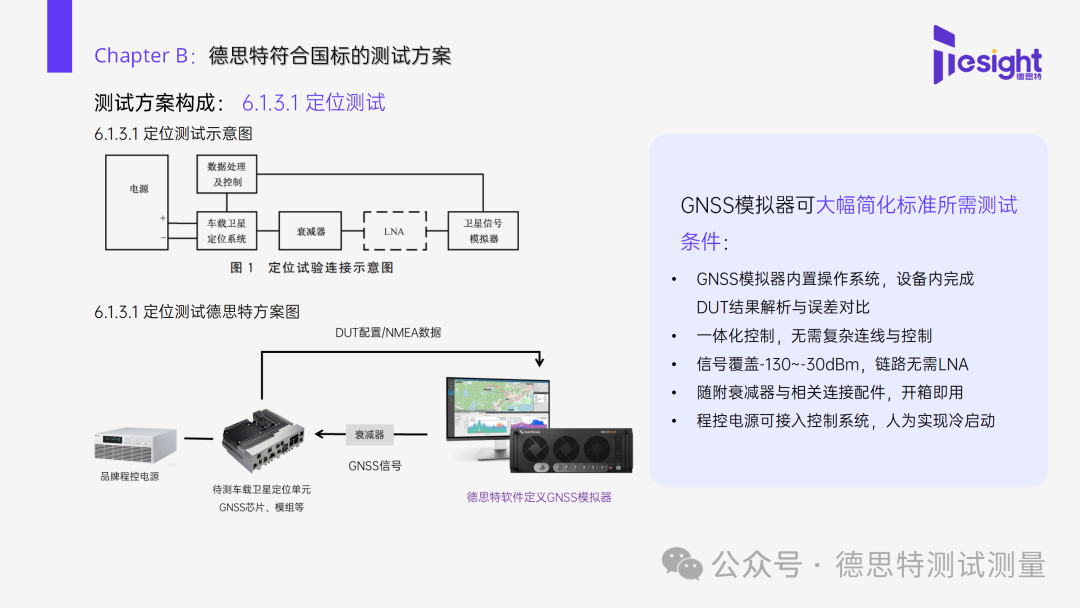
Q:GNSS模擬器是否支持B3i B2b NAVIC L1?
德思特提供的Safran GNSS模擬器當前支持B3I、NavIC L1及QZSS全頻點;B2b預計2025年Q3發布。

Q:1000Hz的仿真迭代率是否能體現在GNSS射頻信號上 還只是軟件數據的迭代?
體現在兩方面:閉環仿真中上位機每秒處理1,000次數據更新;射頻端通過每秒生成1,000次IQ數據包(樣本數百萬)實現,但接收機通常以1Hz/10Hz輸出。
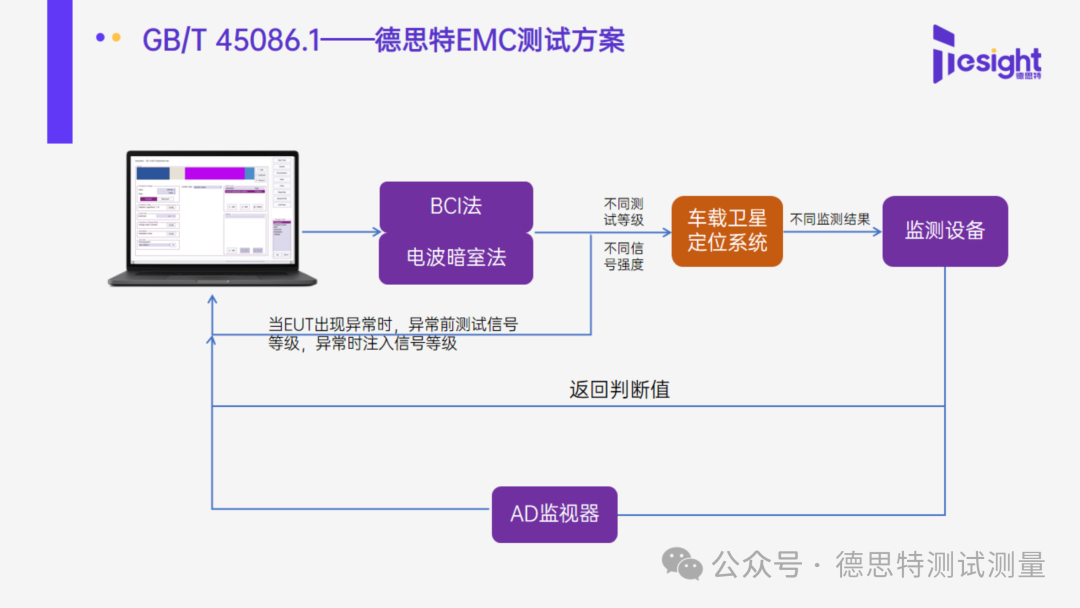
面向GB/T 45086.1《車載定位系統技術要求及試驗方法》EMC部分詳解
Q:試驗中和試驗后檢查被測件的運行情況是為什么?
驗證EMC測試中設備在干擾注入及移除后能否正常運行,通過不同等級測試(L1-L4)且干擾移除后恢復,標志EMC通過。
Q:當被測件異常時,EMC軟件怎么能夠獲得功率和電場值呢?
EMC軟件聯動AD監測器或直連監測設備,異常時通過功率計/電場探頭通道返回注入信號等級。
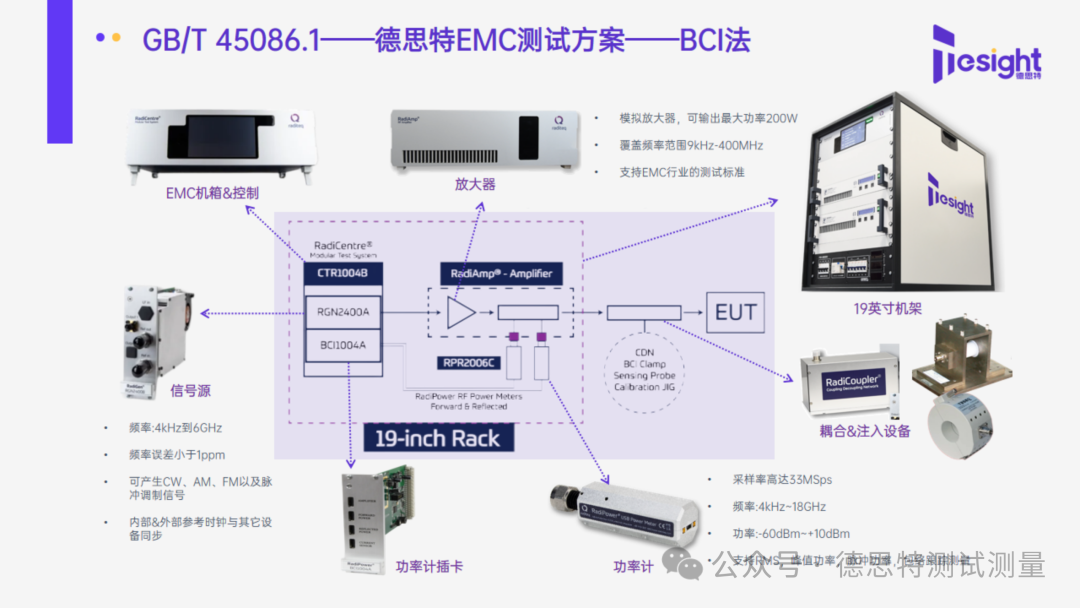
Q:德思特BCI法的特點和優勢?
(1)完全自動化,支持9kHz起始(嚴于部分車企10kHz標準)。
(2)設備靈活復用(信號源、功率計等),降低成本并提升效率。
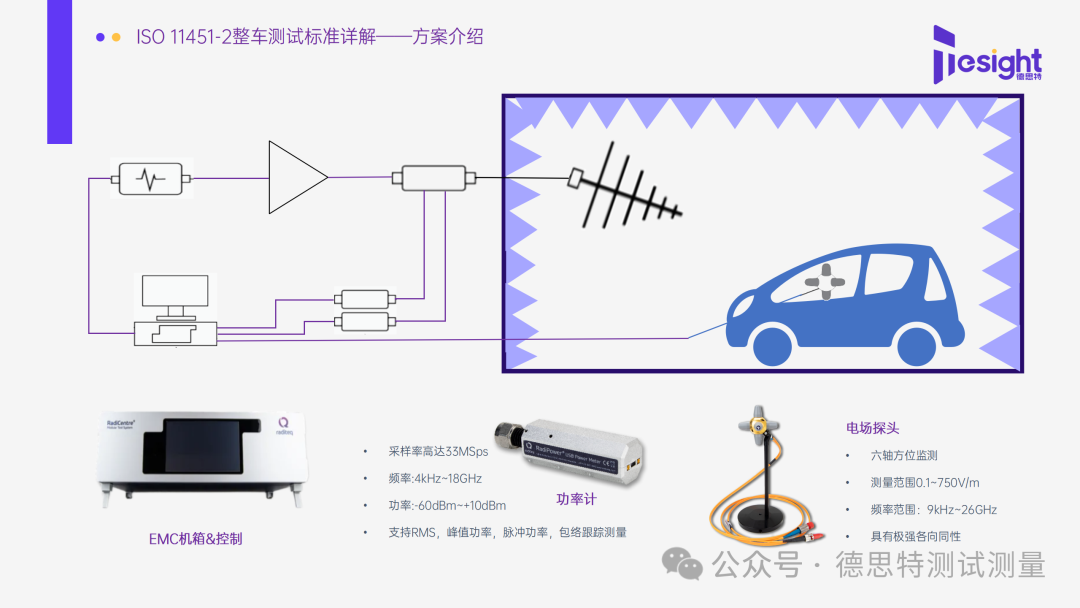
整車輻射抗擾測試ISO11451-2及ISO11451-5的電場探頭解決方案
Q:你們的電場探頭適配EMC32嗎?
適配,通過Visa協議直連;另推薦Redimation軟件兼容多品牌設備(如羅德)。
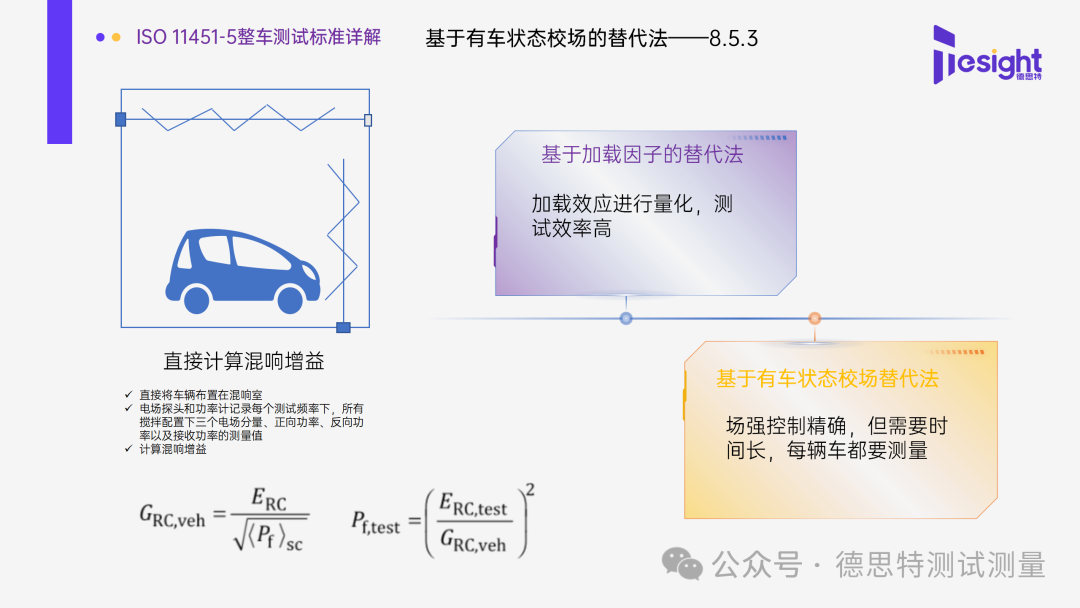
Q:兩個測試方法的優劣勢在哪里?
(1)加載因子法:測試一次后同類型車輛免重復,高效但精度較低。
(2)有車場校準法:每車單獨測試,精度高但流程繁瑣。
Q:8個混響參考點都需要放置電場探頭嗎?
可單探頭多次測試,但效率低;推薦同時放置8個探頭,一次測試獲取全部數據。
?
-
EMC測試
+關注
關注
10文章
158瀏覽量
27415 -
標準解讀
+關注
關注
0文章
5瀏覽量
1090
發布評論請先 登錄
面向未來量子通信與大物理研究線上研討會QA筆記請查收!
2025年簡儀科技全國巡回研討會預告

羅德與施瓦茨測試技術網絡研討會回顧
2025電子設計與制造技術研討會
DEKRA德凱舉辦照明產品新標準解析研討會
DEKRA德凱RED網絡安全上海研討會圓滿落幕
Imagination 系列研討會 |中國生成式 AI 的發展








 工商網監
工商網監
評論