 Allegro創新電機驅動方案在工業自動化與機器人中的應用
Allegro創新電機驅動方案在工業自動化與機器人中的應用

導言
電機作為工業自動化市場的支柱,其核心地位源于大多數應用均涉及運動或旋轉場景。從機器人、傳送系統到零件操縱器,從物料搬運設備、風扇到手臂工具、檢測機器,再到線性運動執行器等,相關應用場景極為廣泛。而這些應用的落地,需要傳感器、控制器與執行器構成的整體生態系統支撐。在機器人及工業自動化領域,根據具體應用需求,通常會采用有刷直流電機、無刷直流電機和步進電機等專用電機。本文聚焦于低至中等功率范圍的專用電機,深入探討其在各類應用中面臨的不同挑戰與特定需求。
自動化市場趨勢
自動化市場歷來是一個 12V 市場,具有確保系統可靠性和降低整體維護成本的安全需求。然而,為了實現更高的功能性能、提供更高的功率吞吐量、提高系統效率并降低成本,同時滿足工業安全標準,一些關鍵趨勢正在興起。
向 48V 轉變:與傳統的 12V 驅動器相比,轉向 48V 驅動系統可將電流和功耗減少至 25%。這增加了系統負載能力,可以處理更重的負載并執行更苛刻的任務,例如提升更重的組件。此外,更低的電流要求意味著更便宜的布線、更少的熱量散失,以及通過消耗更少能源實現的整體長期成本節約。
創新集成:許多解決方案將電機驅動、編碼和制動系統組合到一個單元中,以簡化設計、減少元件數量、降低布線復雜度,并有效減輕微處理器的計算壓力。通過集成化系統設計方法和菊花鏈通信等部署概念,允許多個機器人單元構建高效通信鏈路。
安全至上:UL2595 和 UL1740 等國際標準指導了電池供電設備的通用安全要求,ISO13482 和 ISO10218 等 ISO 標準針對工業機器人的安全要求。然而,隨著機器人變得越來越復雜和自主化,硬件設計中的安全性對于傳感器和機器人感知失敗的情況仍然至關重要。因此,ISO10218、IEC61508 和 ANSI / RIA R15.08 等標準的嚴格更新預計將強調自動化中的安全需求。

伺服電機需求和挑戰
伺服機構廣泛應用于自動化領域,通過旋轉或直線執行器實現角度/線位移、速度及加速度的精確控制。其區別于常規電機的核心在于采用閉環反饋機制,以確保輸出軸準確到達所需位置。有刷直流電機、無刷直流電機 (BLDC) 和步進電機通常用于機器人、線性傳輸系統和多軸伺服驅動器等低到中等功率應用中的伺服電機驅動器解決方案。
1有刷直流電機
有刷直流電機依賴碳刷和機械換向器結構實現運轉,如圖 1 所示。這些電機的核心優勢是電機本身和電子元件成本較低,且電控系統設計涉及的復雜性較低。然而機械電刷結構導致其存在?電火花干擾與噪聲問題?,限制了在高功率及噪聲敏感場景的應用。該電機需頻繁維護,且?使用壽命相對較短?,典型應用包括直線運動裝置、傳送帶系統及部件操作裝置。
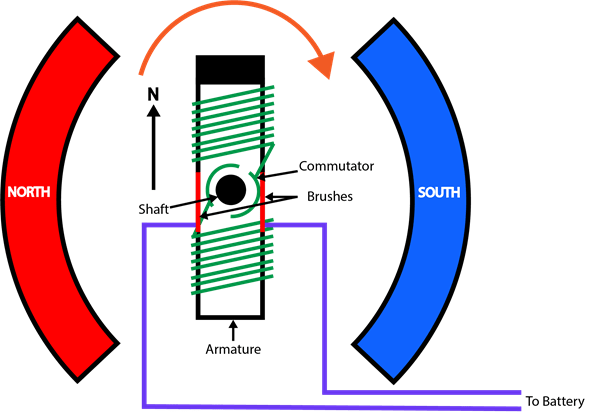
圖 1:有刷直流電機圖
有刷直流電機可以由兩個半橋驅動器、一個全橋驅動器或帶有集成或外部 FET 的多全橋驅動器驅動。根據安全和系統架構需求,具有額外保護和診斷功能的驅動器有助于確保系統可靠性并最大限度地減少外部硬件組件要求。此外,半橋或 BLDC 電機驅動器可以選擇集成高精度電流感應功能,以提供位置精度閉環反饋并減小整體系統解決方案尺寸。
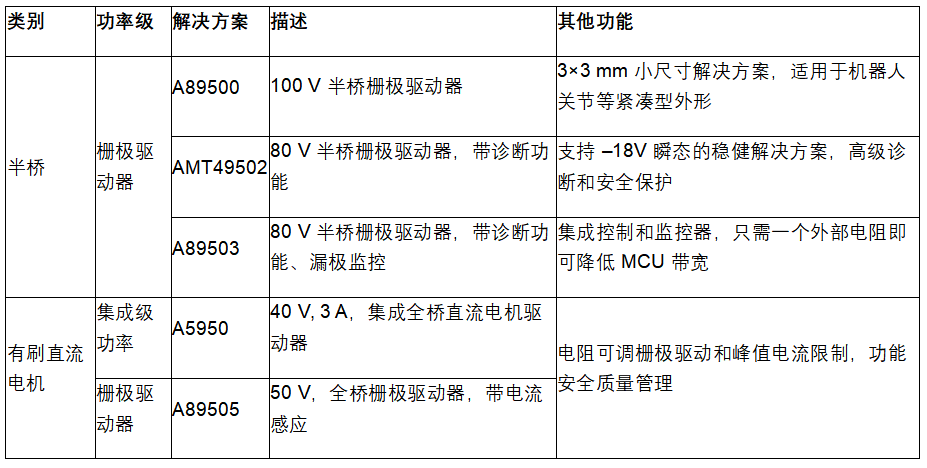
表 1:Allegro 在機器人領域的直流電機解決方案
2無刷直流電機
無刷直流電機更適合需要更低噪聲和更高性能的應用,以支持成本敏感度較低的高速或高扭矩操作。這些應用包括機器人關節、風扇、物料搬運設備、傳送帶、零件操縱器和線性運動。這些電機具有高效率、高磁通密度、低維護要求、低電磁干擾 (EMI)、高堅固性和寬范圍速度控制等優點。與有刷直流電機不同,機器人位置信息必須用于控制 BLDC 電機的電子換向。這種轉子位置通常通過霍爾傳感器(通常是霍爾鎖存器或位置/角度傳感器)或編碼器進行感應。
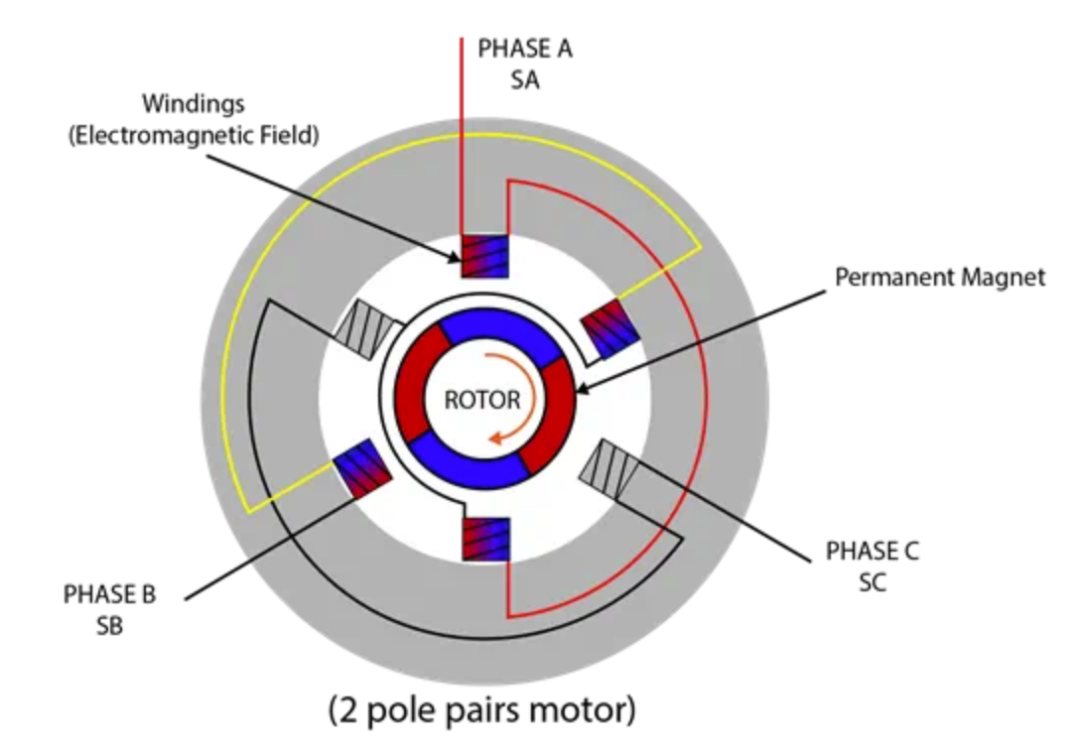
圖 2:無刷直流電機圖
BLDC 電機控制根據位置反饋通常分為兩種類型:有傳感器和無傳感器。有傳感器 BLDC 電機依靠霍爾效應傳感器、位置傳感器或角度傳感器直接測量轉子的位置。這些傳感器通常嵌入在電機內部,并產生與磁場方向相對應的信號,控制器據此信號激活定子對應繞組,實現精準換相。
有傳感器控制算法的主要優點是精確換向、平穩的低速運行、簡化的控制邏輯和可靠的啟動,如圖 3 所示。然而由于需要額外的傳感器,需要增加硬件成本并確保其在噪聲環境中的可靠性。電機的高速運行受到位置傳感器更新速率的限制。
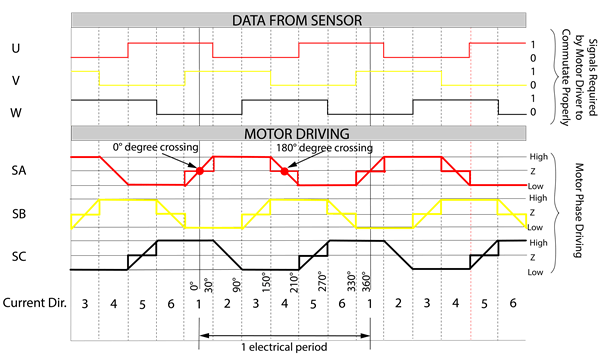
圖 3:使用外部霍爾傳感器反饋的有傳感器 BLDC 控制
無傳感器 BLDC 電機通過監測電機繞組產生的反電動勢來間接估計轉子位置。反電動勢電壓隨轉子位置而變化,提供有關其角位移的信息。存在各種無傳感器技術,包括過零檢測、反電動勢積分和基于觀測器的方法,以準確檢測轉子位置,如圖 4 所示。這種控制技術提供了改進的可靠性性能,因為無需霍爾傳感器,從而消除了與傳感器振動和線束相關的問題,并降低了成本,并有可能達到更高的速度。然而,整體算法復雜性增加,這反過來增加了控制器成本,并且對電機參數的高度依賴需要額外校準。此外,在較低速度下,反電動勢的估計具有挑戰性,這導致啟動問題和較低速度下的性能不佳。雖然無傳感器控制具有成本效益、外形尺寸更小,并提高了可靠性。
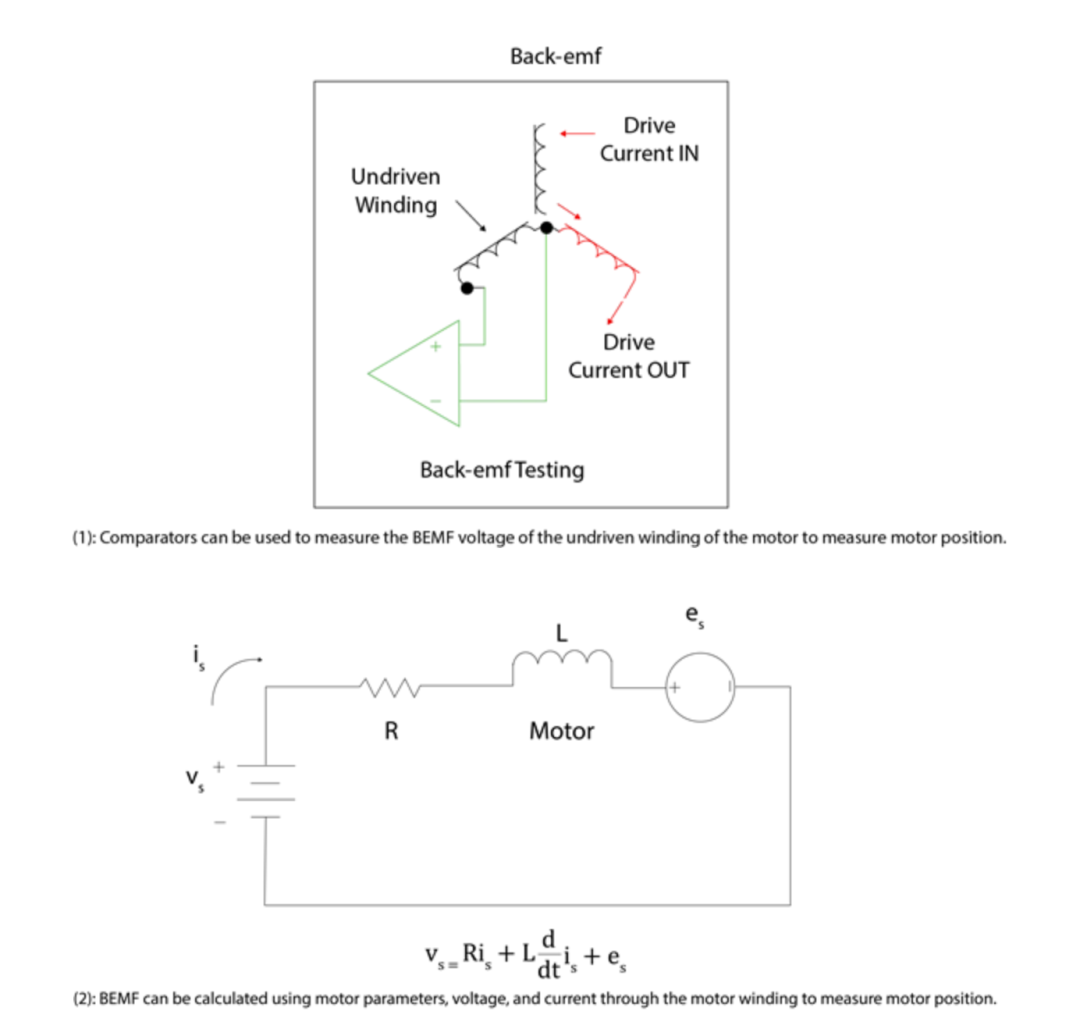
圖 4:電機繞組反電動勢測量技術對比圖
無傳感器無刷直流電機中的算法復雜性還取決于反電動勢的類型,如圖 5 所示。梯形反電動勢 BLDC 電機的控制算法比正弦波反電動勢 BLDC 電機更容易實現。梯形波反電動勢 BLDC 電機在高速度和高扭矩應用中更受歡迎,其中噪聲非主要限制因素,而正弦波反電動勢 BLDC 電機用于更復雜和高性能的應用。還有更專業的算法,例如磁場定向控制 (FOC),用于提高正弦反電動勢 BLDC 電機的效率。
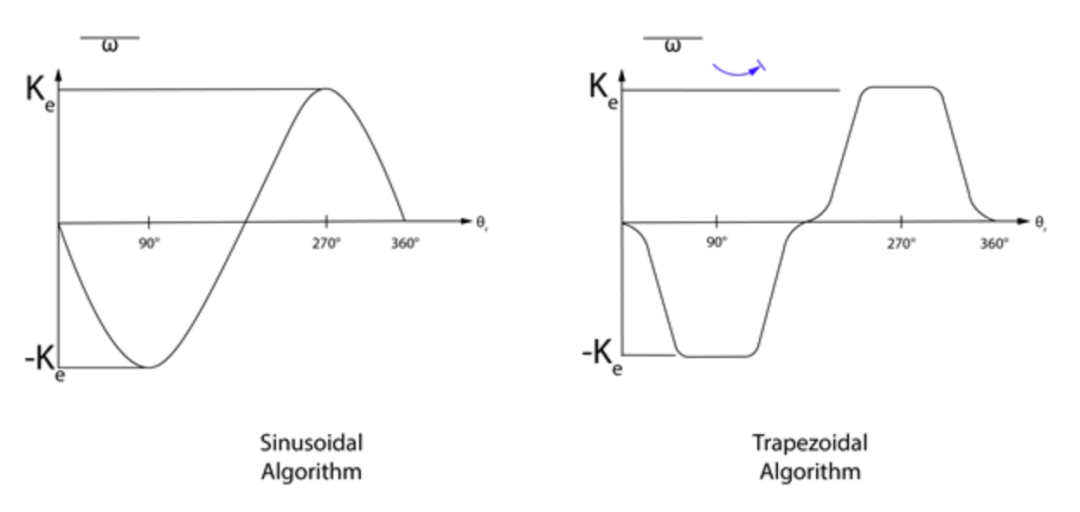
圖 5:電機控制算法基于反電動勢特性構建
無刷直流電機可以由三組半橋驅動器或一個集成/外置 FET 的三相 BLDC 驅動器?驅動。根據系統安全和架構需求,具有額外保護和診斷功能的驅動器有助于提高系統可靠性并最大限度地減少外部硬件組件要求。此外,半橋/BLDC 電機驅動器可以選擇集成高精度電流檢測放大器,以進一步降低 BOM 成本并減小整體系統解決方案尺寸。
此外,免代碼 BLDC 驅動器提供集成有傳感器或無傳感器電機控制解決方案,可釋放 MCU 算力,其效率相較傳統 MCU 生成 PWM 信號控制 MOSFET 的方案顯著提升。
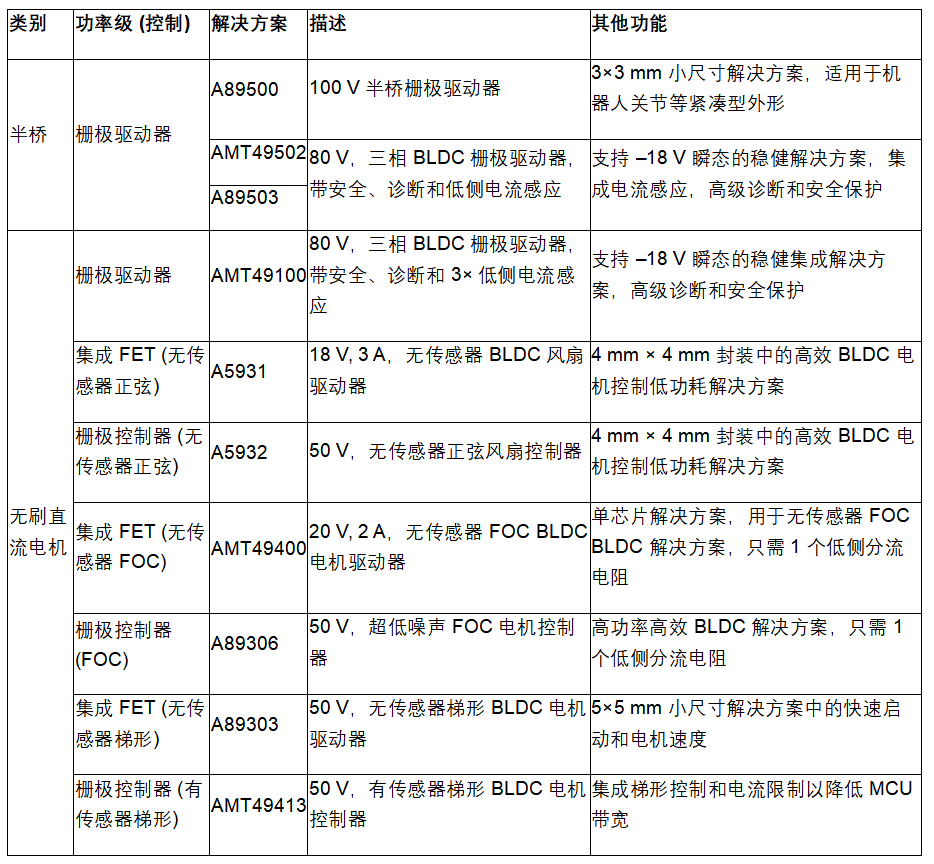
表 2:Allegro 在機器人領域的無刷直流電機解決方案
3步進電機
步進電機通常用于低速、低功率和精確位置控制場景。步進電機的主要優點包括更高的保持和低速扭矩、高可靠性和與伺服電機相比更低的成本。然而,步進電機效率不高;因此將其用于更高功率應用并不劃算。
此外,由于它們使用開環控制,無閉環反饋導致系統無法檢測?失步?或?堵轉狀態?。因此,步進電機適用于非關鍵和成本敏感應用中,但仍需要位置精度,例如機床。
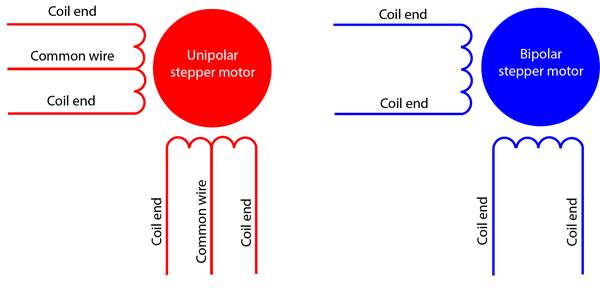
圖 6:單極電機與雙極步進電機接線圖
在各種步進電機類別中,單極和雙極步進電機最常見,如圖 6 所示。單極步進電機用于高速、高扭矩應用,但需要微步進才能實現開環位置控制。另一方面,雙極步進電機由于易于電流控制和更好的低速性能而變得越來越普遍。
步進電機可以由雙 H 橋驅動器或帶有專用步進控制的步進驅動器驅動,使用集成或外部 FET。根據安全和系統架構需求,具有額外保護和診斷功能的驅動器有助于確保系統可靠性并最大限度地減少外部硬件組件要求。此外,步進驅動器可以選擇集成強大的保護功能,例如失速檢測、開路負載或短路到電池和接地,以便在處理大負載時執行位置控制。
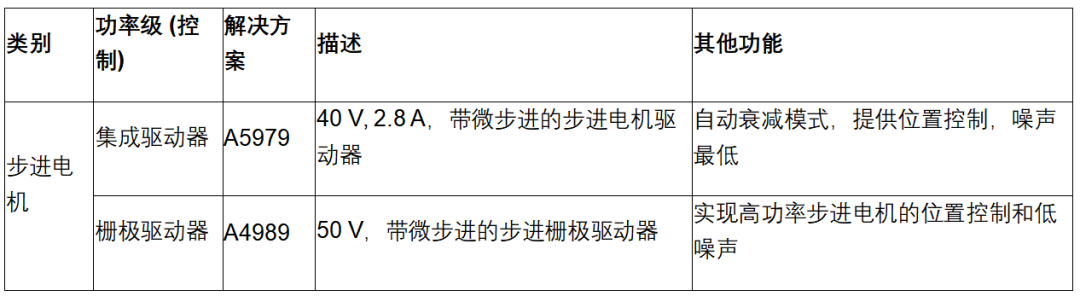
表 3:Allegro 在機器人領域的步進電機解決方案
4伺服電機驅動器
伺服電機驅動器用于工業自動化應用中的精確位置和速度控制。伺服電機驅動器涉及閉環位置和速度控制,并實施編碼器反饋,以允許實時調整速度和位置,從而即使在動態負載情況下也能確保精確和穩定的運動。傳統上,有刷直流電機已用于伺服驅動器,但現在,BLDC 電機在伺服應用中更受歡迎。伺服驅動器的主要優點是寬速度范圍、快速響應、平穩控制、高可靠性、精確的位置和速度控制、高能效、易于集成以及易于多軸控制的同步。伺服電機應用類似于 BLDC 電機,但更適用于精度和時序至關重要的場合。這些包括精密機器人、物料搬運設備、零件操縱器、線性運動控制系統等等。圖 7顯示了伺服電機驅動器的框圖。
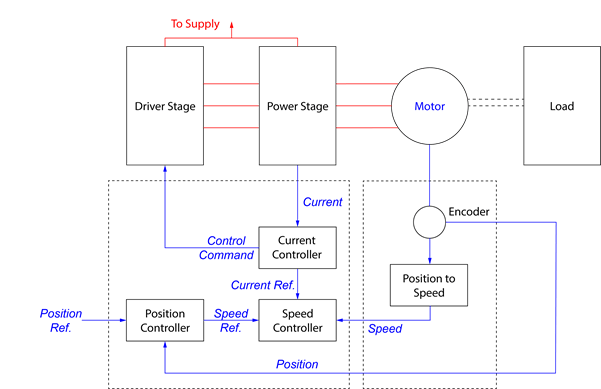
圖 7:伺服電機驅動器
伺服電機的控制回路實現涉及使用多個傳感器反饋回路,這會帶來更高的維護要求和環境敏感因素。多軸控制會進一步增加復雜性,這需要高速微處理器與兩個或更多伺服電機進行實時通信和控制。這些因素會影響驅動系統的整體實施、安全性和維護成本。然而,由于高性能、精確的位置控制和快速響應時間,伺服電機仍然是工業自動化應用的熱門選擇。
Allegro工業自動化電機驅動方案
Allegro 提供全面的電機驅動解決方案,包括集成功率級或柵極驅動器級兩種配置方案。集成功率級的器件可以處理高達約 2 到 3A 的典型電機電流,而柵極驅動器可用于驅動外部 MOSFET,根據柵極電流強度支持更高的功率。
-
機器人
+關注
關注
213文章
29664瀏覽量
212416 -
伺服電機
+關注
關注
88文章
2113瀏覽量
59489 -
allegro
+關注
關注
42文章
717瀏覽量
147294
發布評論請先 登錄





 工商網監
工商網監
評論