 伺服電機的工作原理、構成以及應用
伺服電機的工作原理、構成以及應用

伺服電機(英文:servomotor),在機器人、制造設備以及汽車等眾多領域有著廣泛應用。
初次接觸時,其工作原理或許看似復雜。本文將采用循序漸進的方式,系統闡述伺服電機的基本工作原理、構成以及應用。
伺服電機的工作原理
什么是伺服電機?
伺服電機,通常是指一種用于執行位置控制任務的電動機。
它的特點是能夠以非常高的精度控制旋轉角度和轉速,這要歸功于伺服電機的特殊控制系統。
下面將闡述伺服電機的基本工作流程。
基本工作流程
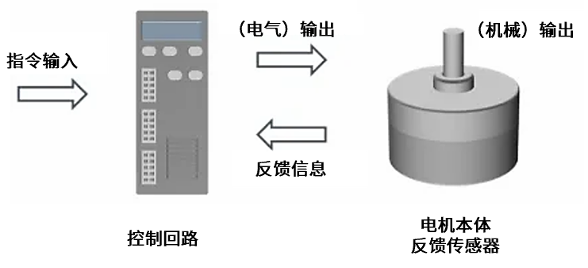
伺服電機的運行依托于 “控制回路” 或 “反饋回路” 系統。
該系統主要涵蓋以下四個步驟。
指令輸入 :在該環節,向系統下達“希望執行何種操作”的指令。比如,可以下達指令讓電機旋轉到特定角度。
控制 :基于輸入的指令,由控制算法決定電機如何運行。
輸出 :執行控制單元所決定的動作。電機在這一步驟中進行實際的物理運轉
反饋 :測量電機的實際位置和速度等參數,判斷其是否與指令要求相符。該信息會反饋至下一個控制單元,并根據需要進行調整。
通過這個反饋回路高速且連續的運行,伺服電機得以實現高精度、高響應性運轉。
伺服電機的構成
下面對伺服電機的基本構成進行說明。
基本構成
伺服電機主要由以下四個主要部件組成:
電機本體 :作為伺服電機的核心,電機本體承擔著將輸入電能轉化機械運動的重要職責。電機的類型,如直流電機或交流電機,以及其在電能-機械運動轉換過程中的特性(轉矩、速度等),均會對伺服電機最終的控制性能產生重大影響。
反饋傳感器 :反饋傳感器用于檢測電機當前的位置和速度。這些信息用來對系統預期運行狀態與電機實際運行狀態進行比較。反饋傳感器有光電編碼器、旋轉變壓器等不同種類的產品。
控制電路 :控制電路負責在電機本體和反饋傳感器之間進行信息交互,并生成控制指令,為電機提供適配的電力驅動。該部分決定了電機控制的精度和響應性。
電源 :電源負責為電機運行提供所需的電力。伺服電機通常對高精度控制有嚴格要求,而電源的品質和穩定性是非常關鍵的因素。
伺服電機由這些支撐其高精度控制性能的要素構成。電機本體、反饋傳感器、控制電路和電源這四個部分協同工作,使伺服電機能夠發揮其卓越的性能。深入了解這些構成要素的特性和功能,對于更高效地設計和應用伺服電機控制系統具有重要意義。
伺服電機的應用
伺服電機憑借其精確的控制功能和卓越性能,被廣泛應用于眾多產業領域。
下面將介紹伺服電機的部分典型應用場景。
工業生產與自動化
大多數工業機械通常對運行的精準度和可靠性有非常高的要求,而伺服電機因其精確的定位能力和高轉矩,在其中發揮著重要作用。
以數控機床(Computer Numerical Control,CNC)為例,伺服電機能夠將切削工具準確移動至目標位置,進而實現復雜精密形狀的加工。
機器人技術
機器人技術高度依賴于伺服電機。在工業機器人、自動駕駛汽車、無人機以及機器人手術設備等諸多應用場景中,伺服電機的精確控制發揮著不可或缺的作用。

控制方法與控制電路
伺服電機的控制方法包括位置控制、速度控制和轉矩控制等。為了實現這些控制,需配備專用的控制電路。控制電路生成控制信號以驅動電機運轉,同時接收電機反饋的信息,并基于此對控制信號進行更新。另外,借助PLC(Programmable Logic Controller:可編程邏輯控制器 ),可以同時對多個電機進行控制,從而實現更為復雜的電機控制。
-
機器人
+關注
關注
213文章
29748瀏覽量
212940 -
電動機
+關注
關注
75文章
4162瀏覽量
98794 -
伺服電機
+關注
關注
88文章
2120瀏覽量
59665
原文標題:R課堂 | 什么是伺服電機?工作原理與解析
文章出處:【微信號:羅姆半導體集團,微信公眾號:羅姆半導體集團】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
伺服電機工作原理
伺服電機的引腳圖/工作原理/應用






 工商網監
工商網監
評論