 基于STM32C8T6的四旋翼飛行器控制系統硬件電路方案設計
基于STM32C8T6的四旋翼飛行器控制系統硬件電路方案設計
本文基于四旋翼飛行器的工作原理和性能特點,設計了飛行器控制系統的硬件電路。系統包含微控制器模塊、姿態測量模塊、無線通訊模塊、遙控器模塊、電機驅動模塊。系統能夠為傳感器參數測量、控制算法實現、無線通信等提供硬件平臺,功耗低、可靠性高。實驗結果表明,本系統能夠穩定、可靠運行。
四旋翼飛行器是一種具有6個自由度和4個控制輸入的可垂直起降、懸停、前飛、側飛和倒飛的無人駕駛飛行器,4只旋翼可相互抵消反扭力矩,不需要專門的反扭矩槳。被廣泛應用于無人偵察、森林防火、災情監測、城市巡邏等領域。飛行控制系統是四旋翼飛行器的核心部分,其性能的好壞決定了整個系統的性能。近年來,微小型四旋翼無人機的自主飛行控制得到了研究人員的廣泛關注[1]。隨著計算機技術和電子技術的發展,國內的小型飛行器研究開發工作逐漸升溫,許多公司形成了產業。例如大疆公司將四軸飛行器等多軸飛行器實現了商業化應用。國內研究的重點主要為三個方面:姿態控制、傳感器技術發展以及新材料的應用、電池領域技術的研究。典型代表有哈工大、北京航空航天大學、南京航空航天大學、國防科技大學等[2]。在控制算法上,先進PID控制得到廣泛應用[3-4]。
本文以ARM Cortex-M3架構的STM32C8T6作為飛行器控制處理器,以MPU-6050作為飛行器的姿態傳感器,以低功耗2.4GHz的nRF24L01作為無線傳輸器件,以HC-RS04超聲波作為障礙物報警傳感器設計系統硬件電路。經過實驗調試,硬件系統能夠穩定、可靠運行。
1 系統總體結構設計
1.1 物理結構設計
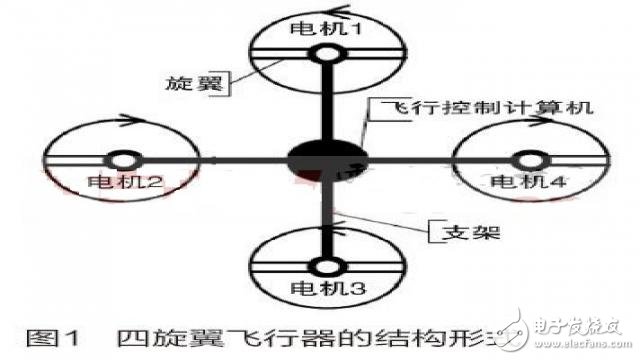
四旋翼飛行器由一個十字支架和四個螺旋槳組成,支架中間安放飛行控制處理器及外部設備,四個螺旋槳半徑和角度相同,呈左、右、前、后四個方向兩兩對稱排列。四個電機對稱安裝在支架端,其中,電機1和電機3逆時針旋轉,電機2和電機4順時針旋轉,通過改變四個電機的轉速來控制電機的運行狀態。其結構形式如圖1所示。
1.2 工作原理
四旋翼飛行器在工作時,是通過電機調速系統對四個電機的轉速進行調節,以實現升力的不同變化,從而控制飛行器的運行狀態。飛行器的電機1和電機3呈逆時針旋轉,電機2和電機4呈順時針旋轉,此時飛行器的陀螺效應和空氣扭矩效應均被抵消,從而保證飛行器能夠平衡穩定的飛行。通過適當地改變電機的轉速,來控制飛行器的飛行狀態。
1.3 飛行器控制系統總體系統設計
飛行控制系統分為地面和機載兩部分,其在物理上是彼此單獨的,在邏輯上是彼此相連的。地面部分又分為地面站部分和遙控器部分,這兩部分相互獨立。整個飛行控制系統由微控制器模塊、無線模塊、電機驅動模塊、姿態測量模塊、高度測量模塊、報警電路模塊、地面站和遙控器等部分組成。系統總體框圖如圖2所示。

2 系統主要功能模塊硬件電路設計
2.1 微控制器模塊
本控制系統是一個多輸入多輸出系統,控制模塊的主要輸入信號有各個傳感器的測量數據,輸出信號為四路變脈寬電機控制信號,需要多個定時/計數器控制信號脈寬。系統需要處理很多傳感器傳來的數據,并且需要將數據送回地面系統,需要實時控制,響應速度必須要快。此外,本系統傳感器的接口多樣化,需要更多樣的接口才能便于軟件讀取。基于這些需求,本設計中飛行器微處理器模塊選用ARM Cortex-M3內核的STM32F103C8T6,它的時鐘頻率可以達到72MHz,并且擁有IIC總線接口、JTAG接口、SPI接口、AD采集接口、多路PWM輸出和多個串口,便于多樣化傳感器的掛接和程序的下載與調試。此微控制器具有8個定時器,對于信號采集和PWM輸出均能滿足。
2.2 姿態測量模塊
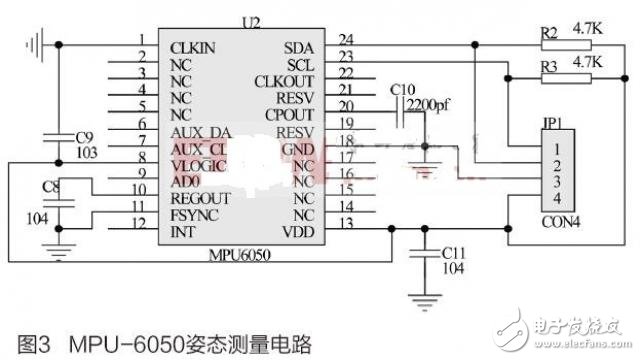
四旋翼飛行器受電機振動和外界干擾影響較大,精確數學模型建立較難,且其載重有限,一般以慣性器件作為姿態測量裝置,姿態測量部件是整個硬件系統的重要部分。本設計綜合考慮硬件設計原則,采用MPU-6050作為飛行器的姿態傳感器。MPU-6050通過IIC協議接口進行通訊,只需要將MPU-6050的SDA數據線和SCL時鐘線與STM32通用I/O口相連接,其電路如圖3所示。為了穩定輸出,避免空閑總線開漏,利用R2與R3作為SDA和SCL的上拉電阻,提高總線的負載能力。電路中C9為數字供電電壓濾波電容,C8為校準濾波電容,C10為電荷泵電容,C11為供電電壓濾波電容。
2.3 無線通訊模塊
系統在這三個方面需要無線通訊:首先需要將遙控器的信號通過無線模塊發送出去。其次,地面站需要接收飛控端的姿態數據,并需要發送控制參數。最后,在飛控端需要接收遙控器和地面站的數據。結合通訊距離,成本等因素,本設計選用nRF24L01無線模塊器件。其發射電路可以通過LC振蕩電路構成。為了便于維修,利用接口將無線模塊獨立出來。
2.3.1 遙控器模塊
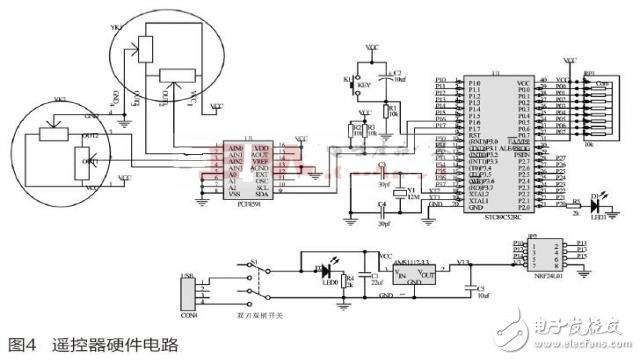
本設計采用搖桿控制方式,利用數-模轉換器將搖桿的模擬量轉化為數字量,再將轉化后的數字信號傳遞給小型控制器,經過一定的數據處理,通過無線發射出去,供飛行器控制器接收利用。采用nRF24L01作為遙控器的無線發射器件,為了便于數-模轉換,遙控器搖桿采用搖桿電位器,通過采集電位器的電壓值去衡量遙控的行程量;由于遙控器處理信號單一,不需要高速的處理器,采用8位的51單片機STC89C52RC作為遙控器的控制器,用來采集搖桿的模擬信號和發送采集到的數據。采用PCF8591作為數據獲取器件,其含有4路模擬量輸入,1路模擬量輸出,屬于標準的IIC通訊,能夠滿足本設計要求。遙控器硬件電路如圖4所示。
2.3.2 地面站模塊
飛行器地面站主要完成以下兩個方面的功能:(1)在飛行器穩定飛行時檢測飛行器的飛行狀態,傳遞控制參數給飛行器,使其按照控制算法運行;(2)在飛行器調試階段,完成飛行器PID參數的修改和調整。由于PC機一般留給用戶操作的多為USB接口,然而nRF24L01通訊接口為SPI接口,本設計選用51單片機讀取nRF24L01的數據,繼續由單片機將數據通過USB轉串口芯片與PC機通訊,完成地面站數據的傳輸功能。
2.4 電機驅動模塊
2.4.1 電機驅動原理
本設計選用直流無刷電機作為飛行器的動力驅動設備。根據無刷直流電機的換向原則,無刷直流電機的控制形式分為:開環控制、轉速負反饋控制和電壓反饋加電流正反饋控制。其中,開環控制無反饋進行校對,應用于轉速精度要求不高的場所;轉速負反饋控制的機械性能好;電壓反饋加電流正反饋控制一般應用在動態性能要求高的場合。針對本設計來說,需要實時調整電機的轉速,并且調速頻率比較大,所以在本設計中采用電壓反饋加電流正反饋控制方法。
2.4.2 電機驅動電路設計
根據電機控制原理,本設計將電機驅動電路劃分為三個部分:微處理器、反電動勢檢測和功率驅動部分。
(1)微處理器
由于無刷直流電機的換向頻率比較高,不宜使用低頻率的處理器,再加上電機的旋轉會產生旋轉的磁場,對處理器有很大的干擾。通過比較,本設計采用ATMEGA8單片機作為電機驅動微處理器。
(2)反電動勢檢測
在換向的過程中,需要不停地檢測轉子的位置,通過轉子產生的反電動勢就可以知道轉子的位置信息,通過分壓衰減原理,檢測電機三相反電動勢電壓相對中性點的電壓,從而確定轉子的位置。反電動勢檢測電路如圖5所示。
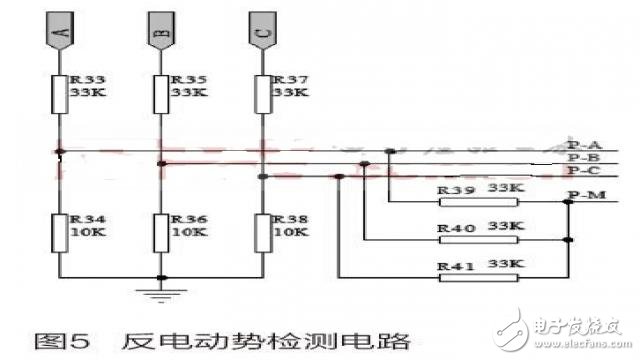
其中,A、B、C端子為電機三相電壓,R33~R38為分壓電阻,P-A、P-B、P-C分別三相反電動勢對應電壓,P-M為中性點電壓。
(3)功率驅動
功率驅動是為了給電機提供大的電流,使其達到能夠穩定運行的目的,本設計采用并聯MOS管提高輸出的電流,在每一相上橋臂并聯3個P溝道MOS管,達到三相全橋可控的目的,在每一相的下橋臂上也并聯3個N溝道MOS管。

3 硬件系統調試
3.1 PWM控制飛行器驅動電機調試
通過對4個電機進行通電,加上不同占空比的PWM波形,來控制電機的轉速,記錄電源電壓、電流的變化情況,在穩定輸出11.1V,不同的占空比下,電源電流變化情況如表1所示。
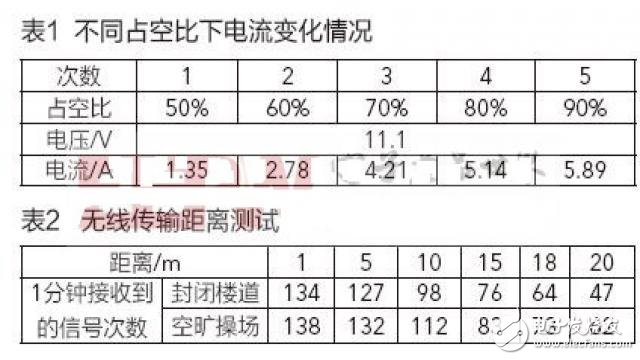
由表1可知:占空比越大,電機驅動工作需要的電流越大;在占空比達到接近極限值時,電流輸出變化很小,實驗表明硬件系統能夠可靠運行。
3.2 無線通訊調試
通過測試無線的連通性、傳輸距離和丟包率,來確定無線模塊的性能特性。把遙控器設置為發送模式,地面站設置為接收模式,利用地面站的報警燈來指示接收的狀態,成功接受一次閃一下,通過改變遙控器和接收機之間的距離,記錄一分鐘內指示燈閃爍的次數,來評估無線傳輸質量;測試分別在教學樓樓道和空曠操場進行,詳細記錄見表2。
由表2可知:無線通訊在15m之后的傳輸效果有明顯下降,這是由無線通信模塊的功率決定的,實驗表明無線通信部分在設計需求范圍內能夠可靠運行。
3.3 綜合調試
圖6為PID控制算法下載到四旋翼飛行器控制器進行實際飛行控制的姿態曲線圖,其中①代表橫滾角,②代表俯仰角,③代表偏航角。圖6為飛行器受到側風干擾后,姿態角受控重新收斂到平穩(0,0,0)狀態的角度數據。下圖為飛行器從某一個姿態受控收斂到平穩(0,0,0)狀態的角度數據。從實驗結果可以看出系統能穩定運行。
4 結束語
完成了四旋翼飛行器控制系統方案設計以及系統各個模塊硬件器件選型和電路設計,進行了系統硬件電路的調試,實驗結果表明,系統能夠穩定、可靠運行。
-
STM32
+關注
關注
2290文章
11018瀏覽量
362961 -
四旋翼飛行器
+關注
關注
18文章
76瀏覽量
40628
發布評論請先 登錄
雙電機控制系統在吊放電纜壽命試驗臺中的應用方案
小馬哥STM32F1主控720空心杯四軸飛行器資料(包含源代碼和相關教程)
STM32F103C8T6 PA2無PWM輸出怎么解決?
激光毀傷系統:低空飛行器的 “隱形獵手”
基于STM32F103V8T6的智能水處理系統設計與實現

MATLAB在低空飛行器中的應用

STM32項目實戰:基于STM32U5的智能燈光控制系統(LVGL),附項目教程/源碼
19.3-星曈科技 openmv Hopenmv發送五個uchar Openmv+STM32F103C8T6視覺巡線小車 STM32循跡小車系列教程
19.4-STM32接收數據-狀態顯示在屏幕 openMV尋跡與小車控制 Openmv+STM32F103C8T6視覺巡線小車
基于STM32單片機的智能冰箱控制系統設計






 工商網監
工商網監
評論