 超聲波測距傳感器模塊使用原理詳解
超聲波測距傳感器模塊使用原理詳解
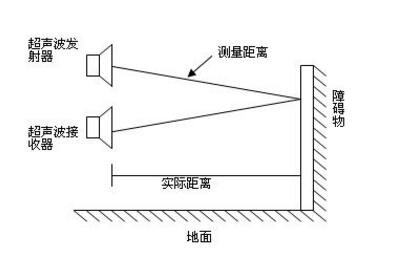
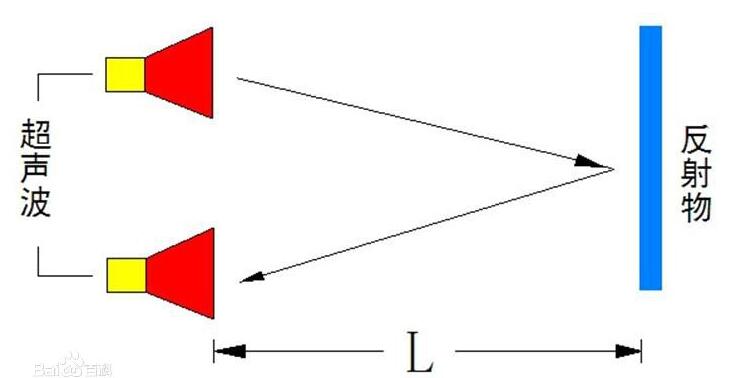
超聲波測距模塊是用來測量距離的一種產品,通過發送和接收超聲波,利用時間差和聲音
傳播速度,超聲波在空氣中的傳播速度為v,而根據計時器記錄的測出發射和接收回波的時間差△t,就可以計算出發射點距障礙物的距離S,即:S=v·△t /2 從而計算出模塊到前方障礙物的距離。

由于超聲波也是一種聲波,其聲速v與溫度有關,表1列出了幾種不同溫度下的聲速。在使用時,如果溫度變化不大,則可認為聲速是基本不變的。常溫下超聲波的傳播速度是334 米/秒,但其傳播速度V易受空氣中溫度、濕度、壓強等因素的影響,其中受溫度的影響較大,如溫度每升高1 ℃,聲速增加約0. 6 米/ 秒。如果測距精度要求很高,則應通過溫度補償的方法加以校正(本系統正是采用了溫度補償的方法)。已知現場環境溫度T 時,超聲波傳播速度V 的計算公式為:V=331.45 + 0.607T。

超聲波測距模塊有好多種類型,目前比較常用的有URM37超聲波傳感器默認是RS232接口,可以調為TTL接口,URM05大功率超聲波傳感器測試距離能到10米,算是目前來說測試距離比較遠的一款了,另外還有比較常用的國外的一款韓國Hagisonic 超聲波測距傳感器模塊 - HG-C40U。
 ?
?
超聲波測距傳感器模塊 - HG-C40U是一款尺寸為50x22x25(mm)、Φ16傳感器的模塊,可測量到障礙物的最大距離為3.5m (at 5V)、5m (at 12V),分辨率在5mm以內。HG-C40U 還具備兩個輸入電壓:5V 和 12V。出廠默認設為 12V。通訊方面采用UART通訊發送數據,在UART 觸發模式下,如果出發命令由 UART 生成,則僅發送數據,發送: #Mode|2 (變為外部觸發模式),接收:!Mode|2 -> !Data Set Complement。信號輸出則將傳感器到PC的通訊使用‘接口板’(RS232,功率調節器)數據顯示使用PC上的監控程序(可用超級終端),高性能ASIC芯片,保證穩定傳輸、靈敏接收。
超聲波測距傳感器HG-C40U連接器配置:

超聲波測距傳感器HG-C40U的UART 設置:

超聲波測距傳感器HG-C40U的通訊協議:

工作模式用于超聲波模塊,分為三種:自由運行, UART 觸發和外部觸發模式。自由運行模式以有規律的間隔觸發超聲波;UART 觸發模式則以周期性或隨機用 UART 進行外部超聲波觸發 (觸發命令);外部觸發模式需要外部觸發信號用于規律或不規律的間隔觸發信號。當處于顯示工作模式發送: @模式、接收: !模式-> @Mode|0。工作模式設置(UART 觸發)是設置為%. Transmit : #Mode|1 (變為 UART 觸發模式),%. Receive : !Mode|1 -> !Data Set Complement。
超聲波測距傳感器HG-C40U的精度等級:


-
超聲波傳感器
+關注
關注
18文章
602瀏覽量
36735
發布評論請先 登錄
超聲波測距原理
超聲波傳感器在機器人中的應用
基于STM32超聲波測距設計的合集
超聲波傳感器測距系統如何設計
簡單的超聲波測距模塊制作_HC-SR04超聲波測距模塊及制作圖詳解
收發一體超聲波測距離傳感器模塊_空氣中70KHZ超聲波換能器傳感器探頭DYA-70-03A測距探頭3米量程...







 工商網監
工商網監
評論