 FMCW雷達系統的詳細介紹和計算公式及應用的資料概述
FMCW雷達系統的詳細介紹和計算公式及應用的資料概述

FMCW,即調頻連續波。FMCW技術和脈沖雷達技術是兩種在高精度雷達測距中使用的技術。其基本原理為發射波為高頻連續波,其頻率隨時間按照三角波規律變化。FMCW(Frequency Modulated Continuous Wave),達接收的回波的頻率與發射的頻率變化規律相同,都是三角波規律,只是有一個時間差,利用這個微小的時間差可計算出目標距離。
FMCW雷達系統通過天線向外發射一列連續調頻毫米波,并接收目標的反射信號。發射波的頻率在時域中按調制電壓的規律變化。FMCW毫米波雷達的發射信號采用的是頻率調制,常用的調制信號有:正弦波信號、鋸齒波信號和三角波信號等,當以三角波或鋸齒波作為調頻波時,稱其為線性調頻連續波(LFMCW)。三角波線性調頻連續波利用差拍傅立葉方式在一個周期內就可無模糊確定目標距離和速度,處理簡單,易于實現,它利用發射信號的線性調頻和從目標反射回來的接收信號頻率的變化相關和頻譜配對來進行動目標的測量,比較易于實現的測距測速連續波雷達,因此三角波線性調頻連續波雷達的設計和實現,有著非常重要的現實意義。
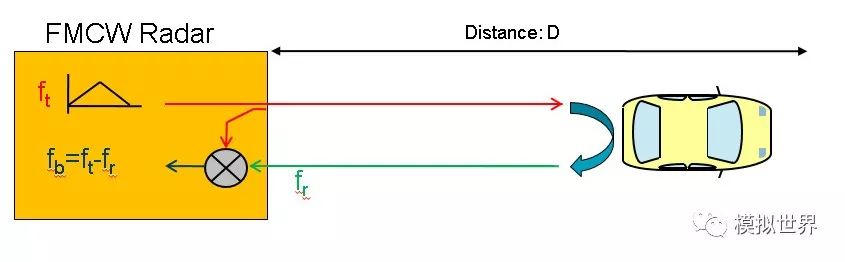
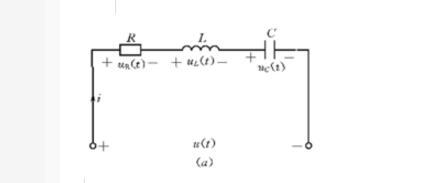
LFMCW波雷達的工作原理是用回波信號和發射信號的一部分進行相干混頻,得到包含目標的距離和速度信息的中頻信號,然后對中頻信號進行檢測即可得到目標的距離和速度。當目標物體是相對靜止的,發射信號碰到目標物體后被反射回來,產生回波信號,回波信號與發射信號形狀相同,只是在時間上延遲了τ(τ=2R/c),式中:R-目標物體的距離;c-光速。
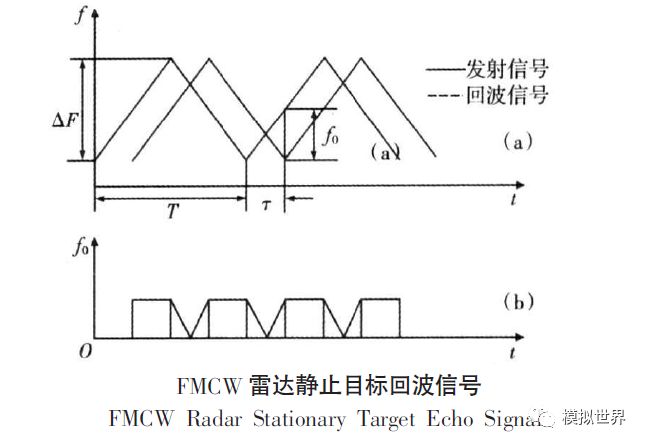
發射信號與回波信號的頻率差即為混頻輸出的中頻信號頻率f0,根據相似三角形的關系,由上圖(a)可以得出:
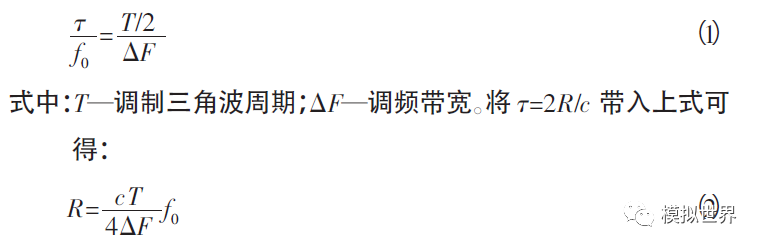
從上式中可以看出,在調制周期T和調頻帶寬確定的情況下,目標距離與LFMCW雷達前端混頻器輸出的中頻信號頻率成正比,這就是目標物體處于相對靜止的情況下LFMCW雷達測距原理。
從上式中可以看出,在調制周期T和調頻帶寬確定的情況下,目標距離與LFMCW雷達前端混頻器輸出的中頻信號頻率成正比,這就是目標物體處于相對靜止的情況下LFMCW雷達測距原理。
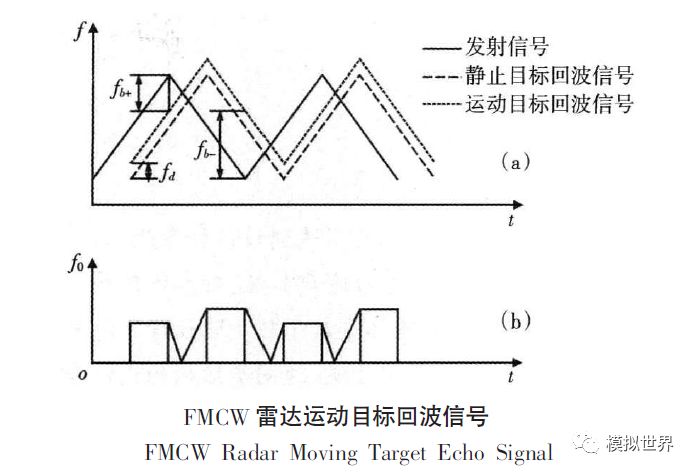
從上圖中可以看出,三角波的上升沿和下降沿中頻信號的頻率可分別表示如下:
fb+=f0 -fd
fb-=f0 +fd
上兩式中為目標物體相對靜止時中頻信號的頻率,為多普勒頻移。由距離公式R和多普勒頻移公式可得:
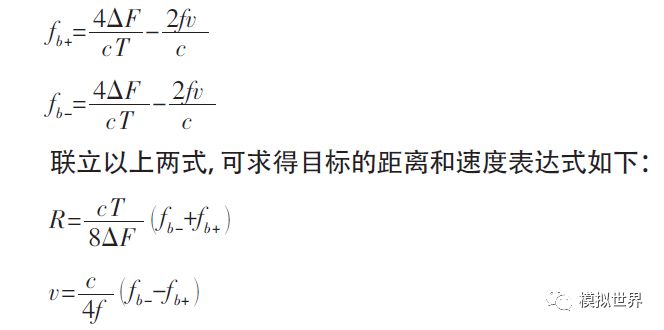
由上述公式可以看出,毫米波雷達信號中頻頻率fb的確定是求出R、V的關鍵。
以上兩式雖然是在目標處于相對運動狀態下推導出來的,但是對于相對靜止的目標同樣適用,因此,在實際應用中,不管目標是處于相對運動還是相對靜止,只要分別求出調制三角波在上升沿和下降沿的中頻信號的頻率,就可以利用以上兩式來計算目標的距離和速度信息,這就是FMCW毫米波雷達測距測速原理。
f的確定即是對發射和反射信號的頻差進行頻譜分析。信號的頻譜分析主要有FFT法和非FFT法。所謂FFT法,即是對被分析的信號進行傅里葉變換,將其從時域變到頻域,在頻域進行分析,必要時再通過傅里葉逆變換,變回時域的分析方法。而非FFT方法則是通過其他的途徑,獲得信號的頻率參數,如最大熵法、MUSIC法等,各有特點。綜合考慮方法的復雜性,實時性,穩定性,對汽車雷達而言,頻譜分析應首選FFT法,這種方法比較成熟,實現容易,實時性強,適合于汽車運行狀況下信號的實時處理。
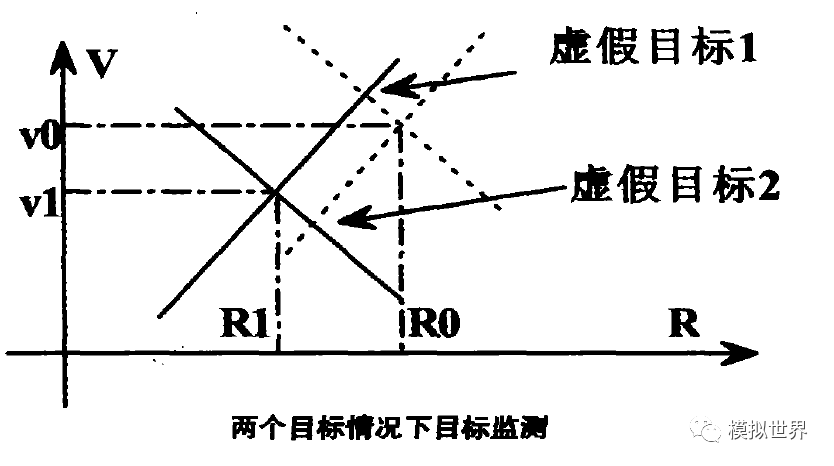
當雷達的輻射范圍內有多個目標時,三角波調頻方式雷達會產生一定的虛警率。
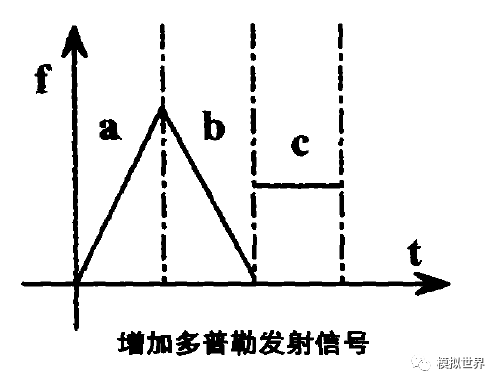
當前方為單目標時,由前面的公式,可以確定兩個二元一次方程。在R—V平面內會確定兩條斜率相反的直線,如下圖中兩條實線。從而獲得一個交點,如下圖中實線的交點,即可確定目標的相對速度和距離信息。而在多目標監測時則會產生虛警。以兩個目標為例,由于雷達的參數相同(k。,k:相同),兩個目標在發射信號處于頻率上升和下降的頻段會產生兩組平行的直線,有四個交點,其中兩個為虛警目標;如下圖所指出,根據中頻信號的信息無法排除。隨著目標數量的增加,虛假目標會成倍的增長。因此,必須對雷達的發射波形進行調整,調整一方面應提高雷達的多目標分辨率,一方面要算法簡便快捷,保證系統的實時性。波形調整的方法有很多種,至今也是毫米波汽車雷達應用的一個難點。這里僅對增加頻率段方法的原理做一簡單闡述。
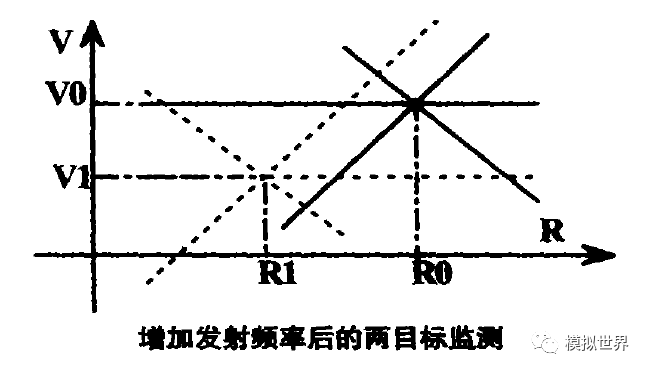
由于增加了和原有頻率不同斜率的發射信號,如下圖中的C段,則目標點在R--V平面內將獲得另外一條直線,與原來兩條直線交于一點,即為目標的信息點,如下圖兩目標檢測中實線的交點。當遇到多目標時如果分屬于不同的頻率段的直線交于一點,則該點為真實目標點。以兩目標點為例,如下圖所示,三直線相交與一點,即為真實目標點,從而消除了一定的虛假目標。當然,增加的頻率段越多,則可以消除的虛假目標也就越多。但是,每增加一個頻率段就會增加系統的運算時間,為此頻率段的增加和系統的實時性要有一定的折中。
隨著CMOS高頻器件和單片微波集成電路MMIC的出現和應用,毫米波雷達的性能有了很大的提高,成本也有所下降,并且雷達的外型尺寸可以做得很小,便于在汽車上安裝。因此,毫米波雷達就成了汽車前視雷達的首選。為了在高速公路上及時發現前方的交通堵塞,汽車用毫米波雷達的探測距離必須在100m以上;為了覆蓋左右兩側的車道線,探測寬度必為3.5m;為了不把道路上方的標識和人行天橋也探測進去,上、下方要有與道路的升降相對應的3m左右的探測幅度。
-
CMOS
+關注
關注
58文章
6009瀏覽量
238659 -
FMCW
+關注
關注
9文章
95瀏覽量
23850 -
雷達系統
+關注
關注
6文章
258瀏覽量
29101
原文標題:自動駕駛技術之——FMCW 雷達簡介
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄






 工商網監
工商網監
評論