") Apollo定位、感知、規(guī)劃模塊的基礎(chǔ)-高精地圖
Apollo定位、感知、規(guī)劃模塊的基礎(chǔ)-高精地圖

上周我們開始帶領(lǐng)小白開發(fā)者學(xué)習(xí)“Udacity X Apollo自動駕駛入門課程”,也收到了很多社區(qū)開發(fā)者的學(xué)習(xí)筆記,讓我們看到他們熱愛自動駕駛、努力學(xué)習(xí)的信心。希望有更多開發(fā)者在學(xué)習(xí)課程的同時,記錄下學(xué)習(xí)要點,更快掌握Apollo自動駕駛知識。
開發(fā)者筆記
本周我們將介紹高精地圖部分的主要內(nèi)容,這是Apollo定位、感知、規(guī)劃模塊的基礎(chǔ)。
與普通地圖不同,高精地圖主要服務(wù)于自動駕駛車輛,通過一套獨特的導(dǎo)航體系,幫助自動駕駛解決系統(tǒng)性能問題,擴展傳感器檢測邊界。目前 Apollo 內(nèi)部高精地圖主要應(yīng)用在高精定位、環(huán)境感知、決策規(guī)劃、仿真運行四大場景,幫助解決林蔭道路GPS信號弱、紅綠燈是定位與感知以及十字路口復(fù)雜等導(dǎo)航難題。
1
高精地圖與傳統(tǒng)地圖
當我們開車時,打開導(dǎo)航地圖通常會給我們推薦幾條路線,甚至?xí)@示道路是否擁堵以及每條路線將花費多長時間、交通管制,例如交通信號燈或限速標志等,我們會根據(jù)地圖提供的信息來決定是在行駛中直行、左轉(zhuǎn)還是右轉(zhuǎn)以及對周圍駕駛環(huán)境的評估。
而無人駕駛車缺乏人類駕駛員固有的視覺和邏輯能力。如我們可以利用所看到的東西和GPS來確定自己的位置,還可以輕松準確地識別障礙物、其他車輛、行人、交通信號燈等,但要想讓無人車變得和人類一樣聰明,可是一項非常艱巨的任務(wù)。
這時就需要高精地圖了,高精地圖是當前無人駕駛車技術(shù)不可或缺的一部分。它包含了大量的駕駛輔助信息,最重要是包含道路網(wǎng)的精確三維表征,例如交叉路口布局和路標位置。
高精地圖還包含很多語義信息,地圖上可能會報告交通燈不同顏色的含義,也可能指示道路的速度限制,及左轉(zhuǎn)車道開始的位置。
高精地圖最重要特征之一是精度,手機上的導(dǎo)航地圖只能達到米級精度,而高精地圖可以使車輛能夠達到厘米級的精度,這對確保無人車的安全性至關(guān)重要。
2
高精地圖與定位、感知規(guī)劃的關(guān)系
高精地圖用于定位
高精地圖是Apollo平臺的核心,許多無人駕駛車模塊都有賴于高精地圖,有了高精地圖我們就需要在該地圖上進行自定位。這意味,需要弄清我們在地圖上的位置,這就是定位——無人駕駛車輛在地圖上的確切位置。
首先車輛可能會尋找地標,我們可以使用從各類傳感器收集的數(shù)據(jù),如攝像機圖像數(shù)據(jù)、激光雷達收集的三維點云數(shù)據(jù)來查找地標。車輛將其收集的數(shù)據(jù)與其在高精地圖上的已知地標進行比較,這一匹配過程是需要預(yù)處理、坐標轉(zhuǎn)換、數(shù)據(jù)融合的復(fù)雜過程。
無人車的整個地位過程取決于高精地圖,所以車輛需要通過高精地圖明確它處于什么位置。
高精地圖用于感知
無人車也可以使用高精地圖來幫助感知,就像人的眼睛和耳朵會受到環(huán)境因素的影響一樣,無人車的傳感器也是如此。攝像機、激光雷達、雷達探測物體的能力,在超過一定距離后都會受到限制。在惡劣的天氣條件下或在夜間,傳感器識別障礙物的能力可能會受到進一步限制。另外當車輛遇到障礙物時,傳感器無法透過障礙物來確定障礙物后面的物體。這時,就需要借助高精地圖的幫助了。
即使傳感器尚未檢測到交通信號燈,高精地圖也可以將交通信號燈的位置提供給軟件棧的其余部分,幫助車輛做下一個決策。
另一個好處在于,高精地圖可幫助傳感器縮小檢測范圍,如高精地圖可能會告知我們在特定位置尋找停車標志,傳感器就可以集中在該位置檢測停車標志,被稱為感興趣區(qū)域ROI。ROI可幫助我們提高檢測精確度和速度,并節(jié)約計算資源。
高精地圖用于規(guī)劃
正如定位和感知依賴高精地圖那樣,規(guī)劃也是如此。高精地圖可幫助車輛找到合適的行車空間,還可以幫助規(guī)劃器確定不同的路線選擇,來幫助預(yù)測模塊預(yù)測道路上其他車輛將來的位置。
如高精地圖可幫助車輛識別車道的確切中心線,這樣車輛可以盡可能地靠近中心行駛。在具有低速限制、人行橫道或減速帶的區(qū)域,高精地圖可以使車輛能夠提前查看并預(yù)先減速。如果前方有障礙物,車輛可能需要變道,可幫助車輛縮小選擇范圍,以便選擇最佳方案。
3
Apollo高精度地圖與構(gòu)建
Apollo高精地圖
Apollo高精地圖專為無人車設(shè)計,里面包含了道路定義、交叉路口、交通信號、車道規(guī)則,及用于汽車導(dǎo)航的其他元素。
高精度地圖可在許多方面為無人車提供幫助,如高精度地圖通常會記錄交通信號燈的精確位置和高度,從而大大降低了感知難度。
高精地圖不僅可以減少計算需求,還可以通過提供有關(guān)駕駛環(huán)境的詳細信息,來確保無人車的安全。保持這些地圖的更新是一項重大任務(wù),測試車隊需要不斷地對高精度地圖進行驗證和更新。此外,這些地圖可能達到幾厘米的精度,這是水準最高的制圖精度。
Apollo 高精地圖是最懂自動駕駛的高精地圖,也是業(yè)界精細化程度最高、生產(chǎn)率最高、覆蓋面最廣的高精地圖。目前,Apollo 高精地圖的自動化程度已經(jīng)達到了90%、準確識別率達到了95%以上,預(yù)計2020年可以覆蓋全國所有的重點道路。
高精地圖有很多種格式,為了方便數(shù)據(jù)共享,Apollo高精地圖采用了OpenDRIVE格式,這是一種行業(yè)制圖標準。同時,Apollo也對OpenDRIVE做出了改進,進而產(chǎn)生了ApolloOpenDRIVE標準,以便更適合無人車。
Apollo高精地圖的構(gòu)建
高精度地圖的構(gòu)建由五個過程組成:數(shù)據(jù)采集、數(shù)據(jù)處理、對象檢測、手動驗證和地圖發(fā)布。
數(shù)據(jù)采集是一項龐大的密集型任務(wù),近300輛Apollo測試車輛負責(zé)收集用于制作地圖的源數(shù)據(jù),以便確保每次道路發(fā)生改變時,地圖均會得到快速更新。測試車輛使用了多種傳感器,如GPS、IMU、激光雷達、攝像機。Apollo定義了一個硬件框架,將這些傳感器集成到單個自主系統(tǒng)中,通過支持多種類的傳感器,Apollo收集各類數(shù)據(jù)將這些數(shù)據(jù)融合,最終生成高精度地圖。
數(shù)據(jù)處理指的是Apollo如何對收集到的數(shù)據(jù)進行整理、分類和精簡,以獲得沒有任何語義信息或注釋的初始地圖模板。
對于對象檢測,Apollo使用人工智能來檢測靜態(tài)對象并對其進行分類,其中包括車道線、交通標志、甚至是電線桿,手動驗證可確保自動地圖創(chuàng)建過程正確進行并及時發(fā)現(xiàn)問題。Apollo使手動驗證團隊能夠高效標記和編輯地圖,在經(jīng)過數(shù)據(jù)采集、數(shù)據(jù)處理、對象檢測、手動驗證之后,高精地圖才能發(fā)布。
除高精地圖外,Apollo還發(fā)布了采用自上而下視圖的相應(yīng)定位地圖、三維點云地圖。
在構(gòu)建和更新地圖的過程中,Apollo使用眾包向公眾發(fā)布其數(shù)據(jù)采集工具,以便任何人都可以參與制作高精度地圖的任務(wù),這加快了高精地圖制作和維護的過程。
-
自動駕駛
+關(guān)注
關(guān)注
788文章
14266瀏覽量
170197 -
Apollo
+關(guān)注
關(guān)注
5文章
348瀏覽量
18774
原文標題:自動駕駛?cè)腴T課程第②講 — 高精地圖
文章出處:【微信號:Apollo_Developers,微信公眾號:Apollo開發(fā)者社區(qū)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
康謀方案 | 高精LiDAR+神經(jīng)渲染3DGS的完美融合實踐

HarmonyOS實戰(zhàn):高德地圖定位功能完整流程詳解
HarmonyOS實戰(zhàn):高德地圖自定義定位圖標展示
谷歌地圖GPS定位
詳細介紹機場智能指路機器人的工作原理
特斯拉FSD、蔚來NAD、小鵬XNGP、華為ADS 2.0、理想AD Max、百度Apollo Lite等系統(tǒng)按技術(shù)點進行對比匯總
高德發(fā)布AI導(dǎo)航智能體:高速駕車場景下可感知車道級交通流變化

TomTom Orbis地圖重大升級
從《自動駕駛地圖數(shù)據(jù)規(guī)范》聊高精地圖在自動駕駛中的重要性

【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人的基礎(chǔ)模塊
精訊暢通發(fā)布RTK+4G定位模塊,開啟厘米級定位新時代
高鐵站定位導(dǎo)航系統(tǒng):3D地圖助力高效解決站內(nèi)尋路換乘難題

面對高通收購,Apollo 50億美元投資,你該買入英特爾股票嗎?

思嵐科技推出新一代圓形通用機器人底盤Apollo2.0
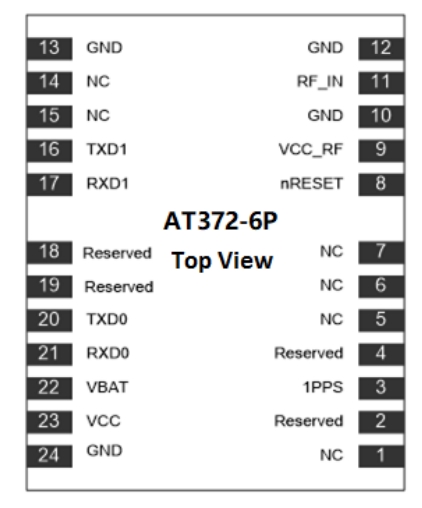
AT372-6P杭州中科微定位模塊場景應(yīng)用





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論