 通過模糊邏輯系統設計的機器人
通過模糊邏輯系統設計的機器人

經典控制理論對于解決線性定常系統的控制問題是很有效的,然而,對于非線性時變系統卻難以奏效。隨著計算機的應用和發展,自動控制理論取得了飛躍性的發展。基于狀態變量描述的現代控制理論對于解決線性或非線性、定常或時變的多輸入與多輸出系統的控制問題,已獲得了廣泛和成功的應用。但是,無論采用經典控制理論還是現代控制理論的控制系統,都需要事先知道被控對象(或過程)的精確數學模型,然后根據數學模型以及給定的性能指標,來選擇適當的控制規律,來進行控制系統設計。然而,在許多情況下,被控對象的精確數學模型很難建立,這樣,對于這類對象或過程就很難進行自動控制。
事實上,對于復雜的、多因素影響的生產過程,即使不知道該過程的數學模型,有經驗的操作人員也能根據長期的觀察和操作經驗進行有效地控制,而采用傳統的自動控制方法的效果則并不理想。然而,能否把人的操作經驗總結為若干條控制規則,并設計一個裝置去執行這些規則,從而對系統進行有效的控制?模糊控制理論和方法便由此而生。
圖一典型模擬控制系統
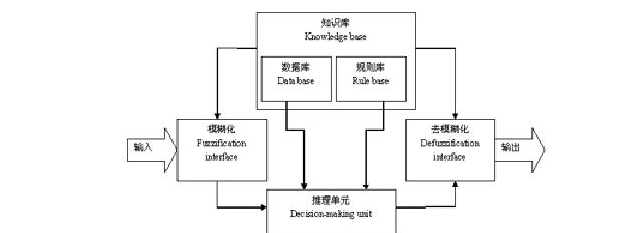
1 模糊控制原理
模糊邏輯控制系統可用來代替經典控制系統或與經典控制系統一起來控制機器人。通過應用模糊邏輯,機器人可以變得更獨特、更具有智能和更加有用。本文根據模糊控制理論為移動機器人的運動控制設計一個模糊邏輯系統。以使移動機器人能根據地形坡度和地形類別來自主的調節自身的運動速度,從而完成機器人運動的自動控制。
圖二模擬過程示意
2 移動機器人的模糊邏輯控制器設計
2.1 確定模糊控制器的輸入變量和輸出變量
根據本設計的目的,為使移動機器人能根據地形的坡度和地形的類別自主地調節
自身的運動速度,本系統可設計為雙輸入單輸出系統,將地形坡度和地形的類別作為兩個輸入,而將移動機器人的運動速度作為控制輸出。
2.2 模糊化
模糊化是將輸入和輸出值轉換為其隸屬度函數的過程。模糊化的結果是一組如圖2所示的圖形,它描述了不同模糊變量中不同值的隸屬度。為了定義模糊地形坡度、模糊地形類別和模糊運動速度的變量,這里將期望的地形坡度范圍固定在-45°~+45°,并劃分成五個隸屬度函數,分別是“負大”、“負”、“水平”、“正”、“正大”。小于-45°的坡度一概看作“負大”,而大于+45°則被認定為“正大”。類似的,地形類別也劃分成四個隸屬度函數,分別是“很粗糙”、 “粗糙”、“平緩”、“平坦”。其中所有粗糙程度大于100%的都被認定為“很粗糙”。而輸出的移動機器人的運動速度(在0~20英里/小時之間)則被分成“很慢”、“慢”、“中”、“快”、“很快”。
根據輸入變量和輸出變量的模糊化(其中地形坡度和地形類別為輸入變量;速度為輸出變量),便可為每個隸屬度函數選擇其他域,并對其進行不同的劃分,以確定隸屬度函數交疊的不同區域,然后設置非對稱的隸屬度函數。
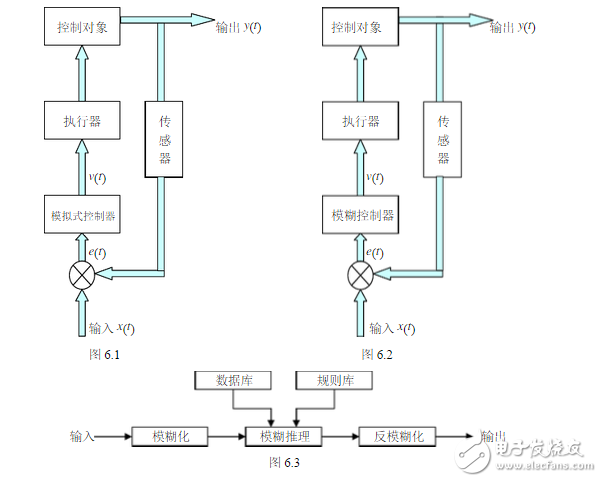
圖三模糊化框架
2.3 規則庫的形成
由于地形坡度有五個隸屬度函數,地形類別有四個隸屬度函數,這樣,總共就會有5×4=20條規則,根據整個設計過程的系統性能要求和設計者的經驗,該模型將形成含有20條規則的規則庫,具體如下:
規則1:if(地形坡度is LP) and(地形類別is VR)then(速度is VS)
規則2:if(地形坡度is LP)and(地形類別is R)then(速度is S)
規則3:if(地形坡度is LP)and(地形類別is Mo)then(速度is Me)
規則4:if(地形坡度is LP)and(地形類別is S)then(速度is Me)
規則5:if(地形坡度is P)and(地形類別is VR)then(速度is VS)
規則6:if(地形坡度is P)and(地形類別is R)then(速度is S)
規則7:if(地形坡度is P)and(地形類別isMo)then(速度is Me)
規則8:if(地形坡度is P)and(地形類別is S)then(速度is F)
規則9:if(地形坡度is L)and(地形類別isVR)then(速度is S)
規則10:if(地形坡度is L)and(地形類別is R)then(速度is Me)
規則11:if(地形坡度is L)and(地形類別is Mo)then(速度is F)
規則12:if(地形坡度is L)and(地形類別is S)then(速度is VF)
規則13:if(地形坡度is N)and(地形類別is VR)then(速度is Vs)
規則14:if(地形坡度is N)and(地形類別is R)then(速度is S)
規則15:if(地形坡度is N)and(地形類別is Mo)then(速度is Me)
規則16:if(地形坡度is N)and(地形類別is S)then(速度is F)
規則17:if (地形坡度is LN)and(地形類別is VR)then(速度is VS)
規則18:if(地形坡度is LN)and(地形類別is R)then(速度is VS)
規則19:if(地形坡度is LN)and(地形類別is Mo)then(速度is s)
規則20:if(地形坡度is LN)and(地形類別is S)then(速度is Me)
3 清晰化
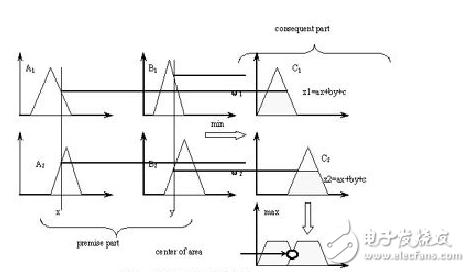
清晰化是將模糊輸出值轉換為可供實際應用的等效清晰值的過程。即對模糊規則進行匹配并計算相應的數值,從而得到一個與不同輸出模糊集隸屬度函數值相關的數。清晰化的方法有很多種,兩種常用的主要方法是:centroid面積中心法(又稱重心法)和Mamdani(馬丹尼)推理法。
3.1 Mamdani(馬丹尼)推理法
該方法中,每個集合的隸屬度函數將在相應的隸屬度值上被截去頂端,并將得到的所有隸屬度函數作為“或”函數加在一起。即將每一個重復的區域作為一層相互疊加在一起,其結果將是一個代表所有區域的新區域。新區域的重心將等價于輸出。
本文中的清晰化主要采用centroid面積中心法。也就是采用MATLAB模糊邏輯工具箱的解模糊化函數defuzz,該函數的功能為執行輸出去模糊化,其格式為:
output=defuzz(x,mf,type)
其中:參數x是變量的論域范圍;mf為待去模糊化的模糊集合;type為清晰化方法,本文主要采用centroid面積中心法。
4 模糊邏輯控制器的仿真
一般情況下,為模糊系統設計的規則必須通過仿真才能保證其對所有的輸人值都能產生滿意的結果,這一般可通過模糊邏輯程序來實現。程序通過運行模糊推理機來計算所有可能輸入產生的輸出,并作出輸出值的圖形來對模糊控制系統進行仿真。通過該圖即可審核規則和隸屬度函數是否匹配。
5 結束語
本文針對不同路面條件下移動機器人運動控制的實際問題提出了一種解決方法。該方法把模糊邏輯推理應用到移動機器人的行為控制中,并將地形坡度和地形類別作為控制器的輸入,而機器人的速度作為控制系統的輸出,從而實現了對移動機器人的行為控制。通過模糊邏輯控制器的仿真結果證明:該模糊控制算法在移動機器人運動控制中能表現出良好的魯棒性和實時性。近年來,神經網絡、模糊控制等理論的研究和應用有了很大的發展,進一步了解學習和應用這些理論將是下一步的目標。
-
機器人
+關注
關注
213文章
29748瀏覽量
212941 -
模糊邏輯控制
+關注
關注
0文章
2瀏覽量
1154
發布評論請先 登錄






 工商網監
工商網監
評論