 簡要說明ML4425的工作原理
簡要說明ML4425的工作原理
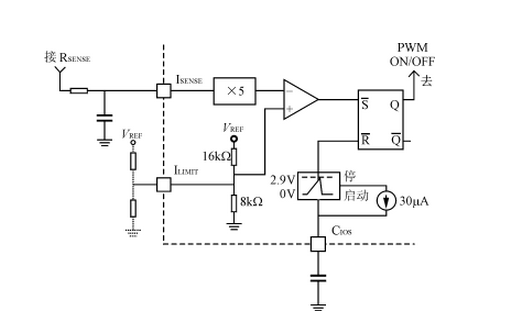
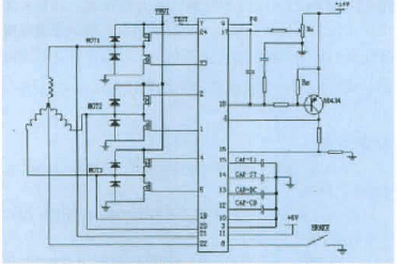
ML4425的整個運行狀態可分為三種。第一種為復位校準狀態,復位校準的時間由外接的起動電容CAT決定。復位校準時刻,上橋臂HA、HC和下橋臂LB導通,電機轉子在磁力線的作用下慢慢轉動,使得磁極中心線與B相繞組中心線重合;復位校準狀態完成后,起動腳CAT由低電平慢慢變為高電平2.01V,同時片內壓控振蕩器開始起振,系統進入開環升速狀態。電機轉速升至可產生足夠大的反電動勢后,系統進人閉環換相狀態。當20腳SPEED FB小于8腳SPEEDSET設定電壓時,電機處于加速狀態。在此期間,電機受到由12腳/LIMIT的控制,控制下橋N型通道的驅動,占空比為100%。當20腳SPEED FB接近8腳SPEED SET設定電壓時,電機進人PWM穩定控制狀態。此時6腳外接電容CT開始充電,產生頻率為50μA/2·4V×CT的PWM鋸齒波。此鋸齒波通過與8腳SPEED SET設定電壓相比較,產生PWM波形,控制下橋N型通道的功率驅動,進而對電機進行速度控制。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
壓控振蕩器
+關注
關注
10文章
154瀏覽量
29606 -
上橋臂
+關注
關注
0文章
3瀏覽量
8675 -
ML4425
+關注
關注
0文章
5瀏覽量
11161
發布評論請先 登錄
相關推薦
熱點推薦
請問參與競標時應該做什么類型的簡要說明?
參與競標時,提示“請輸入您能夠完成任務的簡要說明并且上傳相應附件資料”,如貼主需要一個溫控開關系統,“簡要說明”是否為所需芯片,如何做出來等;附件又該是什么?現象?
發表于 08-01 05:00
熔絲位簡要說明
熔絲位簡要說明熔絲位功能配置說明 熔絲低位CKDIV8時鐘8分頻0:時鐘8分頻 1:時鐘不分頻 CKOUT時鐘輸出0:系統時鐘輸出(PB0) 1:不輸出 SUT1選擇啟動時間根據時鐘源選擇..
發表于 07-21 07:29
Socket API簡要說明
Socket API簡要說明:創建套接字 ( socket ) int socket(int domain, int type ,int protocol);參數描述domain協議族類型type
發表于 01-11 07:26
基于ML4425的無人機設計項目
描述無傳感器 BLDC 電機驅動器大家好,由于無人機已經習慣了很多領域,我想我應該做關于無人機的畢業設計。經過搜索,我決定使用 ML4425 微控制器,它是無傳感器 BLDC 電機控制器。在
發表于 07-19 07:15
無傳感器的直流無刷電機控制器ML4425及其應用(1)
無傳感器的直流無刷電機控制器ML4425及其應用(1)??
摘要:介紹了ML4425脈寬調制電機控制器的功能及其應用。
關
發表于 07-09 10:31
?3378次閱讀
進行對無刷電機控制器ML4425/4426的介紹并運用
ML4425/4426是Micro Linear公司推出的智能型無刷電機專用控制器,可用于為三相無刷電機提供封閉回路的換向控制信號,同時利用PWM模式還可對電機速度進行控制并對電機進行必要的保護。ML4425/4426的特點如下:
ML4425對無位置傳感器電機驅動的注意事項
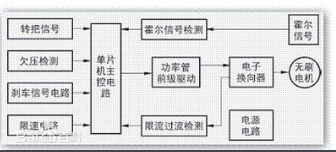
直流電機的主控制芯片。ML4425是MicroLinear公司推出的一種智能型無位置傳感器永磁無刷電機控制器專用電路。該電路內置起動電路、鎖相環邏輯換相電路、PWM速度控制電路和過電流保護電路。該芯片集成度高,應用范圍廣,適合各種負載和電壓的Δ形或Y形繞組的無刷電機控制系統。





 工商網監
工商網監
評論