 電機控制器中PSoC的探究與應用
電機控制器中PSoC的探究與應用
引言
控制工業的發展使得在很多場合下需要使用體積小、功能強的控制器。例如在電動自行車上,為了不在外觀上對車身產生重大的影響(這實際上是行業標準的要求之一),電機作為后輪的一部分,電池(雖然體積不小)也盡量安裝在不甚矚目的地方。這樣的總體要求使得電機控制器也必須在完成所需功能的前提下,盡可能地小巧。這樣的要求歸結到電路的層次就要求選取盡量少和盡量小的元件來實現控制功能。幸運的是,大規模集成電路的發展使得這樣的實現成為可能。Cypress Microsystems, Inc.的PSoC系列就是一種新型的功能強大的控制器優選IC,利用它可以極大程度地減少外圍電路。
1 PSoC 及其特點
PSoC 即可編程片上系統(Programmable System on Chip)。Cypress Microsystems, Inc.的PSoC Cy8c24xxx 系列片內有一個高速內核、Flash 快速閃存和SRAM 數據內存,以及設計者可配置的模擬和數字模塊。其主要特征如下:
■ 功能強大的 Harvard 結構處理器:M8C 處理器速度可達24MHz;8×8 乘法,32 位加法。
■ 先進的外圍電路(PSoC Blocks):6 個模擬PSoC Block 提供多至14 位ADC、多至8 位DAC、可編程放大器、可編程濾波器和比較器;4 個數字PSoC Block 提供8-32 位定時器、計數器和PWM、可連至所有GPIO 引腳、可組合成復雜的外圍電路。
■ 靈活的片上存儲器:4K 字節Flash 程序存儲,50,000 次擦寫;256 字節SRAM 數據存儲;在系統編程。
■ 可編程的引腳配置:所有GPIO 25mA 驅動;上拉、下拉、高阻、強力及開路驅動模式。
■ 其他系統資源:看門狗和睡眠定時器等。
■ 完善的開發工具:免費的開發軟件 PSoC Designer;全功能在線仿真器和編程器。
PSoC 將傳統的單片機系統集成在一顆芯片里,用戶模擬和數字陣列的可配置性是其最大特點,可供開發者隨需配置。
2 控制器需要實現的功能
設計的控制器用于電動自行車上直流電機的控制,具有如下一些功能:
(1) 根據電動手柄或腳踏傳感器的輸入,輸出相應脈寬的PWM 值,改變驅動電流,從而達到改變電機轉速的功能;
(2) 定時巡航功能:若手柄或腳踏輸出在一段時間內不變,則不再響應新的輸入而保持固定的PWM 脈寬輸出,直到輸出超過10%;
(3) 安全方面的考慮。限速:限速開關閉合則控制電機最大速度不超過某定值;剎車:檢測到剎車信號,則停止所有輸出,剎車信號取消后系統重新啟動;
(4) 車速輸出指示:通過測量Hall 傳感器信號檢測車速,送車速指示表盤;
另外,為保證系統的健壯性(Robustness),對于一些偶然的誤操作或外部條件的突然改變應有一定的容錯功能。
(1) 過流保護:電流過大會損壞電路中的元器件,從而影響系統的正常工作。因此,過流保護是一項重要的措施;
(2) 電池欠壓保護:電池的電壓過低時繼續工作會嚴重影響電池的壽命。因此,需要欠壓保護來提示用戶;
(3) 溫度保護:電路中溫度過高會影響元器件的正常工作,所以對此也要采取適當的措施。
3 控制器設計和實現
3.1 PSoC 設置
根據設計要求,選用CY8C24423,首先考慮對PSoC 進行設置,如圖1。系統中選用了多種內部模塊。如表1。內部模塊設置完成后,對相應的管腳進行配置,包括I/O 設定和中斷方式設定等。另外,對全局資源進行設置。本系統中主要的參數有: CPU 時鐘24MHz、工作電壓5V、睡眠定時512Hz(供看門狗定時用)。

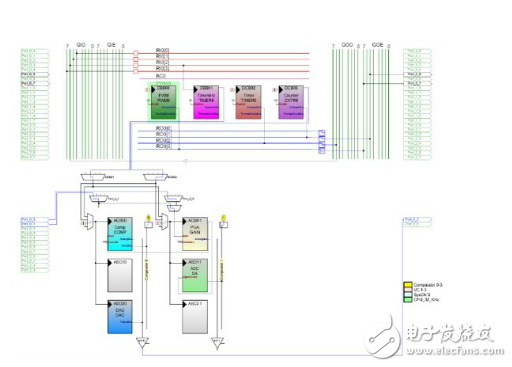
圖1 控制器中PSoC設置
3.2 控制電路設計
如 3.1 所述,由于大部分功能都可以通過PSoC 實現,因此硬件電路的設計相對簡單。圖2 給出了系統中電路框圖。
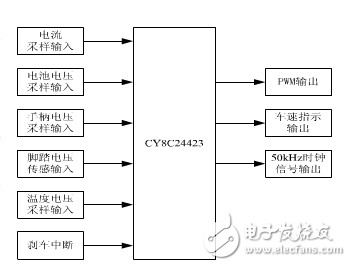
圖2 控制器電路框圖
控制電路對輸入的電流、電池電壓、手柄電壓和溫度電壓送入A/D 采樣;腳踏電壓采用中斷方式,根據脈沖寬度判斷車速和施加在腳踏傳感器上的力的大小,送出相應的PWM,實現助力;剎車中斷作為一個獨立的中斷源,具有最高的優先級。PWM 輸出對于電機的上臂和下臂采用不同的處理。上臂信號直接輸出,而下臂信號在與Hall 傳感信號“與”后輸出。
3.3 控制軟件設計
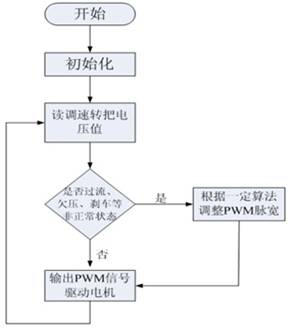
系統的核心部分是軟件的設計。圖3 給出了系統運行的總體流程。
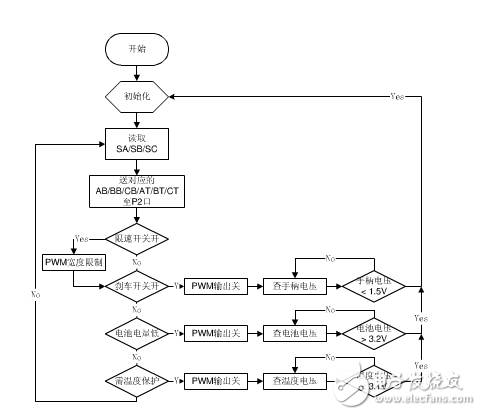
圖3 控制器軟件流程
其中,SA、SB 和SC 分別為Hall 傳感器輸入的電機位置信號,根據他們來確定送往電機控制上臂(AT/BT/CT)和下臂(AB/BB/CB)的驅動信號。主程序根據優先級對可能出現異常的參數進行輪詢。若一切正常,則所需操作就是取得手柄或腳踏輸入轉換為PWM 輸出驅動電機轉動。對于手柄電壓和電流保護采樣,放在PWM 中斷中實現,將在下文說明。使用PSoC 進行程序設計,可有兩種選擇——匯編或C 語言實現。即使在匯編程序中,也可以定義所需要的常數和變量,這無疑大大減小了程序的復雜程度,在現有單片機中是很有特色的。
以下是匯編程序中關于電流保護的一段。
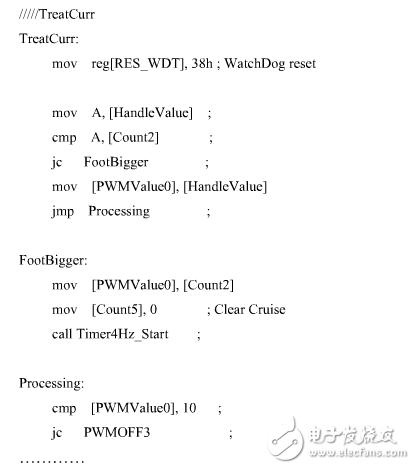
其中定義了若干變量,使得程序的可讀性大大增強。
3.4 系統設計中的關鍵技術
前文已經提到,本系統中使用最頻繁的是手柄/腳踏采樣然后送PWM 輸出;最高優先級的是電流保護。因此,在PWM 中斷程序(pwmint.asm)中實現這兩個功能。
PWM 相關設置
PWM 輸出頻率選擇15kHz/25kHz 兩種,主要的考慮是避開可聽聲的頻率范圍(20Hz~20kHz,到15kHz 時人耳已經不甚敏感),同時及時響應可能的電流異常。
手柄/腳踏信號采樣及處理
為了操作的簡便,該設計中省去了一般電動車上的腳踏開關。因此,對于同時進入的采樣信號,既要保證都能夠檢測到,又要采用合理的處理方法送PWM 輸出。
圖4 給出了系統中手柄采樣/電流保護一體化處理的流程。其中中斷執行5 次(時間間隔:5/15000=0.33ms)分別進行一次手柄電壓采樣,并和腳踏采樣比較,大者送PWM 輸出。圖4 手柄采樣/電流保護一體化處理過流保護的實現。
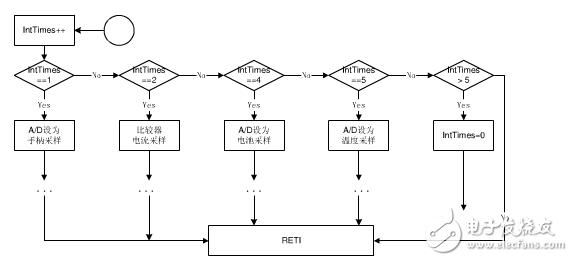
圖4 手柄采樣/電流保護一體化處理
我們知道,瞬間的電流沖擊對于電子元器件有很強的損耗,甚至毀壞。特別對于直流電機來說,在啟動瞬間或者突然的堵轉,將產生電流沖擊。因此,在這種情況下,必須立即減小PWM 輸出脈寬,以防意外。系統中,對于過流保護是一個重點,而其難點在于迅速對過流作出響應。若采用PSoC 中的A/D 模塊進行采樣,即使使用響應較快的6 位A/D 模塊SAR6(已經犧牲掉了一定的精度),其轉換時間20μ s,經測試,后續的處理難以起到限流作用。另外一個問題就是對于沖擊毛刺的處理。由于電流(系統中通過一個5mΩ 的電阻變換為電壓信號)在上升沿處容易產生毛刺,因此需要一定的延時再進行處理。這樣,上述模塊更加難以勝任。經過仔細分析遴選,最終確定選用CMPPRG 比較器模塊。
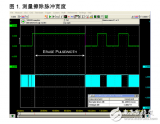
該模塊響應時間(在HighPower模式下)響應時間僅為1.2μ s,加上為剔除毛刺所需要的10μ s延時,仍能夠滿足限流需求。需要指出的是,系統設計中巧妙利用PWM 輸出過程進行限流處理,使得限流更加可靠。圖5給出了限流處理的時序。在第一個PWM 周期內,沒有檢測到過流,因此PWM 輸出脈寬在第二周期內保持不變。在第二個周期內檢測到了過流,立即從下一周期開始減小PWM 輸出脈寬,從而電流得到了限制。
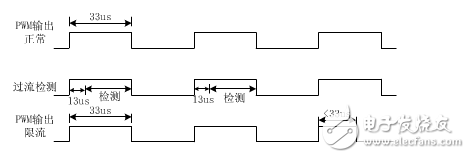
圖5 限流處理時序圖
結語
本文介紹了一款電動自行車控制器的設計。該設計基于功能強大的PSoC 單片機,外圍電路簡單可靠,程序設計中利用PWM 輸出高電平時間檢測電流過載,取得的很好的效果。目前,該控制器已經量產,用戶反響良好。
-
PSoC
+關注
關注
12文章
175瀏覽量
93076 -
電機控制器
+關注
關注
21文章
557瀏覽量
32596
發布評論請先 登錄
基于PSoC4的BLDC電機控制系統的設計與實現
基于嵌入式PSoC 的MCU 選色控制器設計
基于嵌入式PsoC的MCU選色控制器設計
PSoC微處理器在電動車無刷電機控制器上的應用
PSoC 1 使用外部微控制器對 PSoC? 1 器件編程 (HSSP)-AN44168
基于PSOC3的移相控制器的設計與實現

基于PSoC4 的無刷直流電機控制系統設計及實例分析






 工商網監
工商網監
評論