 應用于艦船編隊的無人機基站群組網的設計方案及計算和性能仿真
應用于艦船編隊的無人機基站群組網的設計方案及計算和性能仿真
a引言
近幾年來我國海洋戰略的實施強度加大,這也使水上交通更加頻繁。在進行海事安全管理過程中,安全事故的出現概率相對較高,相關部門也提升了對于海事監督管理工作的重視程度。無人機具有較強的靈活性、續航性和較廣的覆蓋面積,能夠在較為廣闊的水域進行實施監督,為海事工作的有效進行奠定基礎。
5G關鍵技術——超密集組網(Ultra-Dense Network,UDN)可以在一定程度通過快速資源調度來提高系統無線資源利用率和頻譜效率,但同時也帶來了系統干擾和信令負荷加劇等問題。因此,為了解決嚴重的干擾和頻繁切換帶來的挑戰,網絡體系結構由傳統的以基站為中心發展到以用戶為中心。較之基于傳統地面基站的用戶為中心網絡,用戶為中心的無人機網絡研究仍然在起步階段。研究工作主要在用戶為中心的體系結構設計和移動性增強的方面。其中,首先提出基于本地錨點的雙鏈接體系結構,使用戶為中心的服務能夠跟隨每個用戶移動。定義了一種以用戶為中心的新型網絡結構,為每個用戶構建一個動態基站組,從而無縫地為每個用戶提供服務,保證用戶始終如一的服務體驗。
以用戶為中心(User-Centric Network,UCN)的新網絡結構成為下一代移動網絡的發展方向。在UCN網絡中,典型用戶可以根據自己的需求挑選網絡資源,形成虛擬小區網絡。通過使用UCN服務,用戶可以按需挑選網絡資源來創建虛擬網絡,從而成為自己的服務提供商。考慮用戶為中心網絡寬波束場景,用戶選取周圍站點組成潛在服務群組為其進行多小區聯合寬波束傳輸。隨著用戶的移動,用戶的潛在服務群組不斷動態更新,小區邊緣用戶的覆蓋和吞吐量嚴重下降問題得到解決。
當無人機通信數據量較大時,需要較大的帶寬進行通信,毫米波技術可以滿足無人機進行超高速的數據傳輸。然而,由于毫米波頻段的路徑損耗嚴重,通信距離受限。為了提高毫米波頻段的通信距離,窄波束聚集了傳輸能量實現方向性通信。地面基站和用戶之間的波束對準、波束跟蹤和鏈路中斷后的快速波束恢復,成為近些年來的研究熱點[7],目標在于設計新的波束對準、跟蹤和快速波束恢復算法,從而減少用戶和基站之間波束對準的時延、信令開銷和波束選擇的復雜度,而無人機站點具有移動性,通過波束掃描進行快速波束對準將更加頻繁。此外,若無人機和用戶側都使用面陣天線(Uniform Planar Array,UPA)時,相對于使用線性天線陣列(Uniform Linear Array,ULA),波束對準和波束跟蹤方法將更加復雜。
事實上,基于IEEE 802.11ad/ay的無線局域網已經具備毫米波頻段使用面陣天線,支持點到點和點對多點通信的相關設計,這兩種無線局域網的波束管理機制也同樣適用于無人機之間以及無人機與地面用戶之間的場景。基于IEEE 802.11ay協議中的波束管理機制,無人機站點群組與地面用戶通過波束掃描選擇最佳波束對作為服務波束對。隨著無人機和地面用戶的移動,若服務波束對無法滿足鏈路性能要求,即對服務波束對進行波束跟蹤。由波束偏移角度和波束主瓣寬度確定需要跟蹤的波束對范圍,驗證以服務波束對為中心的圓形區域中的所有波束對的鏈路性能是否滿足要求。
本文構建了用戶為中心的無人機基站群組網,為船舶編隊進行數據服務,并結合無人機基站的移動性、信道變化的復雜性以及無人機基站的能源限制,給出適合該場景的用戶初始接入方案設計,包括波束掃描流程與算法設計,并針對波束信令開銷進行計算和性能仿真。
1、 系統模型
1.1 組網架構
假設每個旋翼無人機支持多波束,與附近的無人機建立方向性波束鏈路,為了提供較高速率的無線回傳鏈路,無人機基站群組中的一個無人機作為數據中心將數據回傳到地面基站(該無人機可視為無人機基站群組的控制中心),該無人機與地面基站的回傳鏈路仍為方向性波束,如圖1所示。
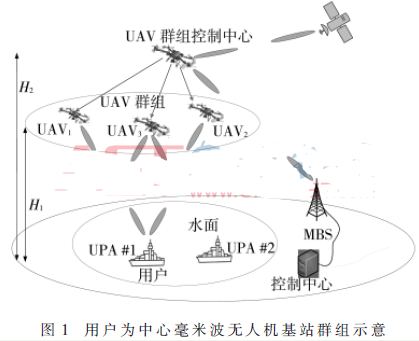
考慮到在實際場景(如補盲場景)中地面基站的數目較少,為了簡化設計,本文只分析如下場景:
1.2 波束模式模型
毫米波天線為面陣天線,為了覆蓋到所有的方向,可以布置兩個毫米波天線面陣分別位于無人機的上下方,地面的站點和用戶同樣采用毫米波天線面陣進行波束對的掃描跟蹤,本文在用戶側采用的發送接收模式如圖2所示。
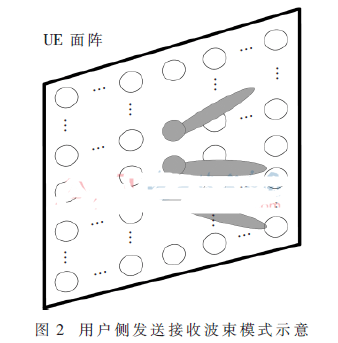
用戶側可以裝配多個面陣天線,包括以下3種工作方式:
(1)一次只有一個面陣被激活,且面板轉換的時延為毫秒級;
(2)一次有多個面陣被激活,但一次只有一個面陣用于數據傳輸;
(3)一次有多個面陣被激活且可以用于數據傳輸。如圖1所示,本文中考慮用戶側有兩個面陣可以同時被激活,但只有一個被用于數據傳輸。
無人機之間及無人機與地面用戶、地面基站之間的波束采用理想的天線模型建模,歸一化的波束賦形增益為:
1.3 信道模型
用戶接收功率表達式為:

其中,d為接收端和發送端之間的距離,Pt為發射功率,Gt為發送端波束賦形增益,Gr為接收端波束賦形增益,λ為波長,α為路徑損耗指數。
若服務波束對來自UAVi,則無人機基站群組中其他無人機基站的波束對對于該用戶均屬于干擾,用戶側信干噪比為:
其中,B為波束帶寬,N0為功率譜密度。
2、 用戶初始接入無人機基站群組機制
假設無人機基站群組處于巡航狀態,需要考慮用戶為中心網絡下地面用戶初始接入的無人機基站群組方式的變化。考慮無人機基站的移動性、信道變化的復雜性及無人機基站的能源限制,給出適合該場景的用戶初始接入方案設計,包括波束掃描流程與算法設計、波束信令開銷計算和性能仿真。
在傳統初始波束掃描方案中,主要存在以下缺陷:
(1)用戶側只與無人機群組中的一個無人機進行波束對連接,若該鏈路中斷或性能低于要求,缺少快速波束恢復的設計;
(2)依據波束偏移角度和波束主瓣寬度確定波束跟蹤范圍,需要驗證服務波束對周圍的所有波束對的鏈路性能,造成不必要的波束跟蹤開銷;
(3)考慮到毫米波無人機站點群組被部署在天空,無人機之間及無人機與地面用戶之間的相對位置變化頻繁,這就需要無人機之間及無人機和地面用戶之間頻繁的波束跟蹤以確保實時波束對準,從而提供可靠的、超高速的無線傳輸。
此外,無人機的使用壽命受電池的限制,較高頻率的波束訓練可能會浪費寶貴的數據傳輸機會。
本節將具體闡述地面用戶和無人機基站群組之間的初始接入機制,先按步驟說明用戶初始接入的整體流程,再給出簡潔易懂的算法設計。
2.1 初始接入流程
無人機基站群組和地面用戶的初始接入方法主要分為以下兩個部分:
(1)快速波束掃描階段
①波束掃描為上行波束管理過程;
②波束掃描為半周期性,在波束掃描周期內若出現波束跟蹤和波束恢復無法滿足波束鏈路性能,則觸發下一次波束掃描;
③由于無人機的部署可能不在同一高度及存在較復雜的信道變化,優先考慮保證波束連接的穩定性和連續性,再考慮波束鏈路性能;
④在保證波束鏈路性能的前提下,盡可能減少無人機波束掃描的信令開銷和能量開銷。
(2)波束備份階段
由于無人機基站的移動性導致服務波束鏈路容易發生中斷,用戶側具有兩個天線面陣,其中一個天線面陣的波束對可以作為備份波束,從而在發生鏈路中斷后進行快速波束恢復。
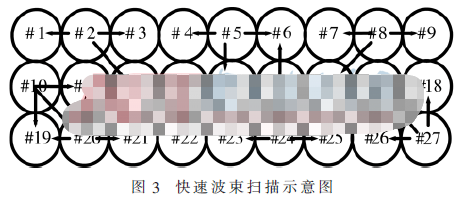
①步驟1:初次波束掃描搜索過程
基于天線面陣的結構,每隔固定的距離選擇天線陣子,發送上行波束進行初次波束掃描。如圖3所示,假設{#beamUE,2;#beamUE,5;#beamUE,8;#beamUE,10;#beamUE,13;#beamUE,17;#beamUE,20;#beamUE,24;#beamUE,27}是用戶側一塊天線陣列面板的初次波束掃描的集合,無人機基站群組進行接收波束掃描。
②步驟2:鏈路性能判決過程
給定兩個SINR界限η1和η2(η2>η1),若初次波束掃描的信干噪比均低于η1,則重新選擇一組初次波束掃描的集合;若初次波束掃描的信干噪比存在大于η1的波束對,則進行步驟3的二次波束掃描搜索過程。
③步驟3:二次波束掃描搜索過程
第二次波束掃描則從初次波束掃描的性能最佳波束附近進行,如圖3所示,若初次波束掃描的最佳波束為24,第二次需要掃描{#beamUE,15 #beamUE,23 #beamUE,25},最佳性能波束在第二次掃描的波束對和初次掃描所得波束中比較選擇。
④步驟4:鏈路性能判決過程
若此次波束掃描的波束對性能均低于η2,則重新進行步驟1的初次波束掃描過程;若此次波束掃描的性能最佳波束對的信干噪比性能大于η2,則將鏈路性能最佳波束對作為服務波束對。
⑤步驟5:波束備份過程
由于假設用戶側具有兩個獨立的天線面陣,兩個天線面陣經過如上分層的波束掃描過程選擇了各自的最佳性能波束對后,經過比較將該用戶的信干噪比最佳波束對作為服務波束對,另外一個天線面陣的性能最佳波束對則作為備份波束對。
2.2 算法設計
相應的快速波束掃描算法(Fast Beam Sweeping Algorithm)如下:
(1) 用戶的天線面陣進行上行初次波束掃描,選擇每隔一定距離的天線陣子進行初次波束掃描;
(2) 無人機基站群組進行接收波束掃落,測量各個波束對的信干噪比;
(3) if 接收到的所有波束對的信干噪比值都小于η1,then
(4) 調整初次波束掃描的天線陣子,跳轉到步驟(1);
(5) else if 初次波束掃描中存在波束對的信干噪比大于η1,then
(6) 進行第二次波束掃描過程,第二次波束掃描的掃描范圍為初次波束掃描的性能最佳波束對附近,并測量各個波束對的信干噪比;
(7) if第二次波束掃描的所有波束對的信干噪比均低于η2,then
(8) 調整初次波束掃描的天線陣子,跳轉到步驟(1);
(9) else if 在接收到的波束對中存在波束對的信干噪比大于等于η2,then
(10) 用戶的另一個天線面陣同樣經歷這樣的過程,選出各自天線面陣信干噪比性能最佳的波束對,經過比較將性能最佳的波束對作為服務波束對,性能次優的波束對作為備份波束對;
(11) end if
(12) end if
3、 性能評估
3.1 信令開銷計算
對于地面用戶和地面基站或者固定位置無人機基站通信的場景,地面用戶利用該天線面陣進行初始接入過程中,首先考慮通過詳細的波束掃描選擇信干噪比最佳的波束對進行數據通信,因此信令開銷與用戶側天線面陣的大小直接相關。
基于地面用戶初始接入流程和算法設計,可以得到地面用戶初始接入無人機基站群組的波束信令開銷表達式為:

其中,M為天線面陣中天線陣子的數量,即在傳統方法中需要進行波束掃描的波束對的數量;N1為需要初次波束掃描的次數;N2為需要二次波束掃描的次數。
該公式為基于本文波束掃描算法的最少信令開銷,若天線面陣的形狀為矩形或正方形的長和寬不滿足為3的倍數,波束掃描的信令開銷則隨之增多。
3.2 性能評估
基于信令開銷計算方法,分別設置{N1,N2}={1,1},{2,1},{2,2}。當基于天線面陣進行波束掃描時,分別對本文提出的波束掃描機制以及傳統波束掃描機制進行對比,相應的初始接入信令開銷和天線面陣中天線陣子數目的變化關系如圖4所示。
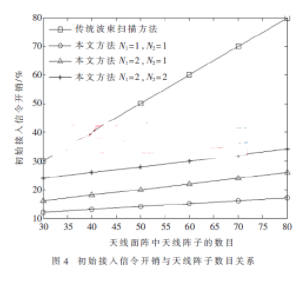
由圖4可以看出:
(1)隨著天線面陣中天線陣子數目的增加,兩種機制的初始接入信令開銷均增加,相比于傳統的波束掃描方法,本文提出的快速波束掃描方法有效降低了初始接入信令開銷。
隨著天線面陣中天線陣子數目的增多,兩種方法均需要更多的天線陣子進行波束掃描,而本文提出的快速波束掃描方法利用空間相關性通過分層的波束掃描,即先進行初次波束掃描再在初次掃描的信干噪比最佳波束對附近進行第二次波束掃描選擇性能最佳波束對作為服務波束對,從而有效減少了初始接入信令開銷。但相比于傳統的波束掃描方法,本文的快速波束掃描方法選擇的可能不是所有波束對中性能最佳的波束對,對于無人機基站高速移動的巡航場景,優先考慮保證波束鏈路連接的穩定性和連續性,再考慮鏈路性能,因此在波束鏈路的性能和信令能源開銷上需要一個折中方案。
(2)由于波束掃描算法中限定了兩個信干噪比界限和,本文的快速波束掃描過程中選擇的天線陣子對應的波束對信干噪比性能可能不滿足上述要求,因此需要考慮調整選擇的天線陣子位置、間隔和數量,多次進行快速波束掃描過程,初始接入信令開銷有所增加,但仍然遠低于傳統的波束掃描初始接入方法。
4、 結論
本文重點提出了5G場景下以用戶為中心的無人機基站服務船舶編隊的初始波束接入的策略設計,并進行了信令開銷性能評估。相比于傳統的波束掃描方法,本文提出的快速波束掃描方法利用空間相關性通過分層的波束掃描,有效減少了初始接入信令開銷。
責任編輯:gt
-
局域網
+關注
關注
5文章
773瀏覽量
46936
發布評論請先 登錄
無人機主從式姿態同步控制器設計與仿真
超聲波傳感應用于無人機著陸技術解析
多軸無人機BLDC驅動解決方案
航模/無人機遙控的解決方案
【瘋殼·無人機教程2】開源編隊無人機-硬件資源簡介
【瘋殼·無人機教程7】開源編隊無人機-地面站上位機的使用和介紹

無人機編隊飛行表演 小學生也能設計的無人機編隊飛行表演
畢節消防救援支隊無人機編隊進行夜間訓練夯實無人機編隊實戰效能
異構無人機群編隊防御部署及評估研究綜述
基于RTK通訊設計GNSS無人機編隊表演方案








 工商網監
工商網監
評論