 基于肌音信號采集系統的仿生手控制系統設計
基于肌音信號采集系統的仿生手控制系統設計
假肢是供截肢者使用以代償缺損肢體部分功能的人造肢體,假肢研究的重點是生理信號的提取和對仿生假手的控制。目前用于假肢控制的仿生控制信號主要有人體自身的肌電信號、腦電信號、神經電信號和聲音等,其中表面肌電信號由于滯后時間短和抗干擾能力強,仍然是假肢的主要仿生控制信號源。但是肌電信號仍然存在著一些不足之處,例如對采集表面要求嚴格,受阻抗影響大,抗干擾能力差等等。肌音信號相比于肌電信號存在許多優點:如不需要直接接觸皮膚;聲音傳感器價格低廉,成本低;肌肉聲音信號強,受體表的電子干擾小;肌音信號的運算處理簡單,可減少對硬件的要求。由于肌音信號的傳播特性,傳感器不需要固定在某些特定的位置上,甚至可以不直接接觸皮膚,而且肌音信號還可以在運動肌肉的末梢采集到,盡管信號的幅度已經衰減了。肌音信號受體表阻抗的影響小,受外電場的干擾小。最后,采集肌肉聲音信號的傳感器比肌電傳感器便宜很多,信號只需要簡單的數字處理硬件(如:DSP)就可以處理。
肌肉收縮時發出的聲音可以通過一個簡單的實驗驗證,把拇指輕輕地按住一個耳孔,然后,一邊提起肘部一邊握起拳頭,你會聽到一種隆隆的聲音,就像遠處傳來的雷聲。科學家開始研究肌肉聲音是從1810年開始的,英國物理學家W.H.Wollaston把肌肉發出的聲音和車輪在卵石街道上發出的隆隆聲響作比較,得到其頻率約為20~30 Hz的結論。對于肌音信號的研究是從1980年真正開始的,英國的生物物理學家Oster發現肌音信號強度與肌肉緊張程度成正比。Barry(1986)提出肌音信號可以用于假肢控制,并作出了嘗試。Bertrand Diemont等通過利用FFT和MESE對肌音信號進行分析,證實了功率譜方法對分析肌音信號的有效性。Travis W.利用小波分析對非穩定肌音信號進行分析,驗證了肌肉進行不同動作時肌音信號存在差異性。Jorge Silva(2005)等通過利用肌音信號模擬肌電信號對假肢進行控制,張合假手正確率分別達到了88%和71%,基本達到了控制假肢的目的。
本文主要從傳感器的選擇與測試,肌音信號采集電路的設計以及信號的初步處理來介紹實現肌音信號采集的方法,從而驗證通過肌音信號控制仿生手的可行性,并且為進一步仿生手控制系統的研究奠定了基礎。
1 人體肌音信號的特點
人體肌音信號屬于生物信號,主要特點有:
(1)信號弱。直接從人體中檢測到的肌音信號其幅值一般比較小。因此,在處理各種生理信號之前要配置各種高性能的放大器。
(2)頻率低。其頻率主要集中在20~30 Hz,一般認為集中在O~50 Hz屬于低頻信號。因此在信號的獲取、放大、處理時要充分考慮對信號的頻率響應特性。
(3)干擾特別強。干擾既來自生物體內,如呼吸干擾等;也來自生物體外,如工頻干擾、信號拾取時因不良接地等引入的其他外來串擾等。
(4)隨機性強。生物醫學信號是隨機信號,一般不能用確定的數學函數來描述。它的規律主要從大量統計結果中呈現出來,必須借助統計處理技術來檢測、辨識隨機信號和估計它的特征;它往往是非平穩的,即信號的統計特征(如均值、方差等)隨時間的變化而改變。因此在信號處理時往往進行相應的理想化和簡化。
2 采集電路的設計要求
針對肌音信號的上述特點,對信號采集電路的分析如下:
(1)找到能夠較好地采集肌音信號的傳感器,考慮從心音傳感器、腿動信號傳感器等醫學聲音傳感器入手。
(2)信號放大是必備環節,而且應將信號提升至A/D輸入口的幅度要求,即至少為"V"的量級。
(3)考慮通過濾波電路來過濾噪音信號。
(4)信號頻率不高,通頻帶通常是滿足要求的,但應考慮輸入阻抗、線性、低噪聲等因素。
3 信號采集系統的設計
3.1 傳感器的選擇
傳感器是整個硬件系統中最為核心的器件。感受肌肉聲音信號最終可以理解為感受肌肉的微震動信號,即將肌肉的震動信號轉換為電信號的傳感器。傳感器的選擇遵循以下幾點原則:足夠的靈敏度和分辨力。肌肉震動為微震動信號,若分辨力不夠,則無法捕捉到這個有用信號;若靈敏度不夠,則得到的信號會非常微小,不利于后續的信號處理。合適的頻率響應特性。一般聲音方面的傳感器能夠響應的最小頻率大概在200 Hz左右,而肌音信號的主要頻段為0~50 Hz,因此一般的傳感器無法達到要求;適當的價格以及盡量簡單的外圍電路。
3.2 傳感器選擇與測試過程
(1)心音傳感器的實驗
對購買的HKY0681K5心音傳感器進行實驗,通過腕帶將傳感器固定在實驗者的手前臂,如圖1所示。讓實驗者手部不停地做抓和握兩個動作,將采集到的肌音信號導入數字示波器進行分析。對該傳感器的測試結果如下:分辨率足夠,而且足夠靈敏,輸出信號幅值相對較高,但是頻率響應范圍太寬,而且傳感器雙面都敏感,噪音很大,對有用信號的影響非常明顯。
(2)壓力傳感器
北京頤松公司的MB-4A壓電式傳感器具有靈敏度高、敏感面大、使用方便、抗過載能力強、抗干擾性好等特點。該傳感器已經集成了放大器和輸出阻抗變換器,因此簡化了外圍電路。由于傳感器集成的放大器放大倍數并不符合采集模塊的采集要求,因此在傳感器外圍還得做一級放大。對該傳感器的測試結果如下:分辨率、靈敏度等各項指標均符合要求,得到的信號波形也較好,可以采用。
(3)加速度傳感器
北京頤松公司的TD-3型壓電式腿動信號微加速度信號傳感器。TD-3型傳感器為壓電式傳感器,響應頻率范圍為O.5~1 000 Hz,靈敏度為150 mV/g,重量小于20 g,該傳感器本用于睡眠過程中檢測腿動信號波形。經過實驗測試,對該傳感器的測試結果如下:分辨率、靈敏度等指標均符合要求,而且得到的信號波形經分析質量優于MB-4A,因此,最終的采集傳感器定為TD-3.
3.3 放大電路設計分析
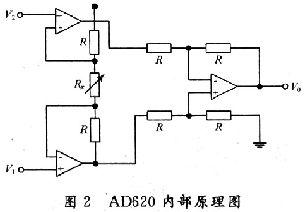
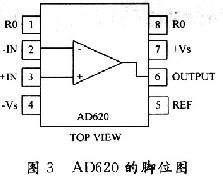
由于人體肌音信號的特點,加上背景噪聲較強,采集信號時電極與皮膚間的阻抗大且變化范圍也較大,這就對放大電路提出了較高的要求,即要求放大電路應滿足:高輸入阻抗;高共模抑制比;低噪聲、低漂移、非線性度小;合適的頻帶和動態范圍。為此,選用Analog公司的儀用放大器AD620作為前置放大。AD620的核心是三運放大電路,其內部結構如圖2所示。該放大器有較高的共模抑制比(CMRR),溫度穩定性好,放大頻帶寬,噪聲系數小,且具有調節方便的特點,是生物醫學信號放大的理想選擇。AD620只用一個外部電阻就能設置放大倍數為1~1 000,而且它是低價格、低功耗、高精度的儀表放大器。AD620能確保高增益精密放大所需的低失調電壓、低失調電壓漂移和低噪聲等性能指標,故可用于精確的數據采集系統,作為各種微弱信號的前置調理器。圖3為AD620的腳位圖。
3.4 低通濾波電路
濾波是指讓被測信號中的有效成分通過而將其中不需要的成分抑制或者衰減掉的一種過程。根據肌音信號低頻的特性,該系統需要設計一個低通濾波器,3 dB頻率是100 Hz,在200 Hz的衰減大于25 dB.
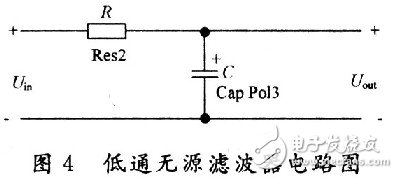
(1)低通無源濾波器
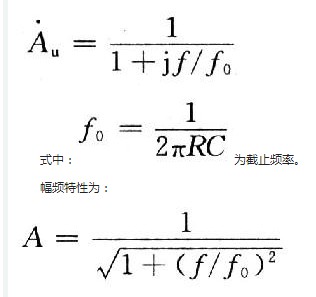
最簡單的低通濾波器是由電阻和電容組成的無源RC濾波器,如圖4所示。頻率越低,容抗就越大,輸出電壓就越大,因此電路具有"低通"特性。電路的傳遞函數為:
RC低通無源濾波器的主要缺點是帶負載能力差。若在輸出端并接一個負載電阻,除了使濾波電路的電壓放大倍數降低外,還會影響截止頻率的值。基于以上原因,最終未采用無源濾波電路,而使用了有源濾波器。
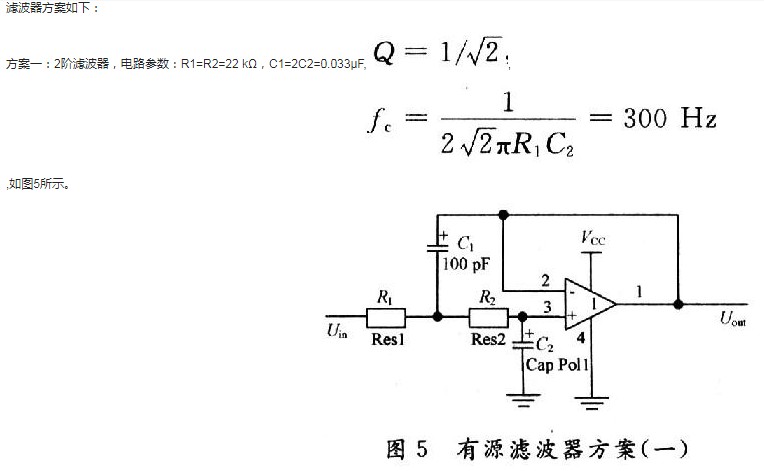
(2)低通有源濾波器
二階有源濾波器通過使用1個運放、1~3個電阻和1~2個電容來實現。有源濾波器可以在兩級間實現隔離,主要是利用運放高阻抗輸入和低阻抗輸出的特性。
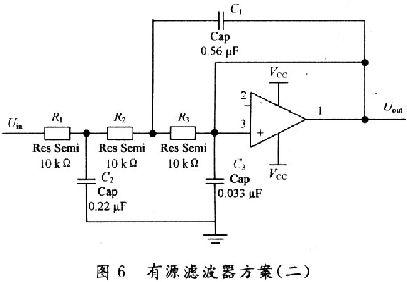
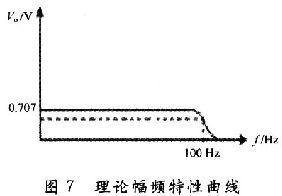
方案二:巴特沃茲濾波器,截止頻率為100 Hz,如圖6所示。圖7為理論幅頻特性曲線。
濾波器測試結果:
測試濾波器的方法:用信號發生器產生不同頻率的正弦波信號,通過濾波器,然后觀察不同頻率下濾波器對信號幅值的衰減情況,第一種方案的結果不盡人意,衰減并不明顯。第二種方案衰減較為明顯,如圖8依次為30 Hz(有效信號部分),100 Hz(信號截止頻率),200 Hz(頻率較高的干擾信號)。30 Hz時,信號幅值沒有衰減;100 Hz時,信號幅值衰減明顯;到200 Hz時,信號幅值已基本全部衰減。基于以上的實驗結果,最終濾波電路采用了第二種方案。
3.5 A/D轉換器
A/D選擇:PMD-1608FS型號的采集卡即可滿足要求,它集成度高,應用簡單。PMD系列是USB接口的多功能數據采集控制器,采用單芯片技術,集成度高,價格便宜,穩定性高,是目前性價比最高的多功能數據采集控制器。
3.6 電源
應用電路中普遍的干擾源為電源,電源線上的噪聲可以通過有源器件的電源引腳傳到芯片內。硬件系統中經試驗得知,AD620必須工作在雙極性電源的情況下。故需要的電壓為:5 V,為傳感器供電和濾波電路運算放大器供電;+9 V,-9 V,分別給AD620芯片和運算放大芯片供電。電路中使用的芯片:
(1)LM2940,穩+5 V電壓,TO-220封裝。特點是在整個溫度范圍內失穩電壓約為0.5 V,屬于低失穩穩壓芯片。此外,還具有靜態電流降低電路,當輸入與輸出的電壓差大于3 V時,可以自動降低靜態電流。
(2)7809,穩+9 V電壓,TO-220封裝。特點是有內部過流、熱過載和輸出晶體管安全區保護功能,電路使用安全可靠,最低失穩電壓是2 V.
(3)7909,穩-9 V電壓,TO-220封裝。特性與7809芯片一樣。
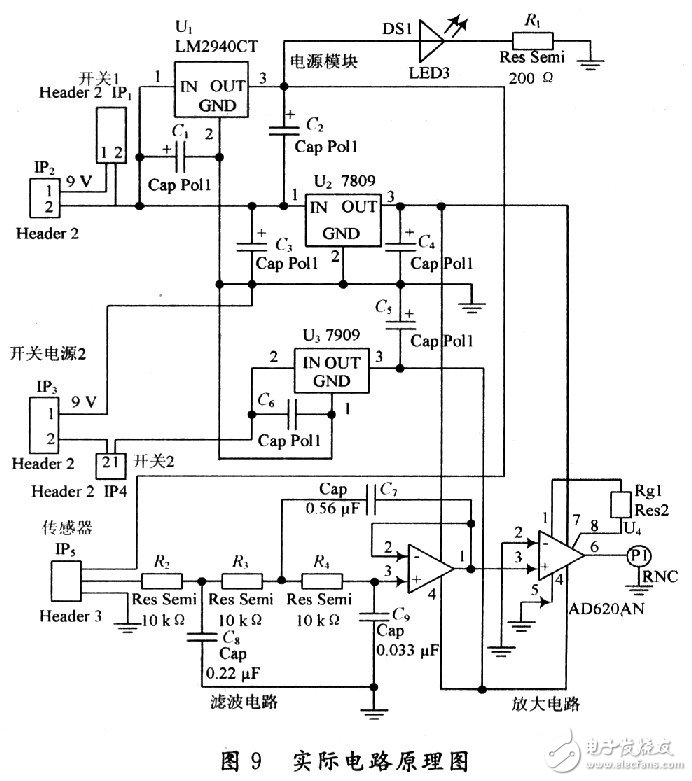
3.7 實際電路原理圖
實際電路原理圖如圖9所示。
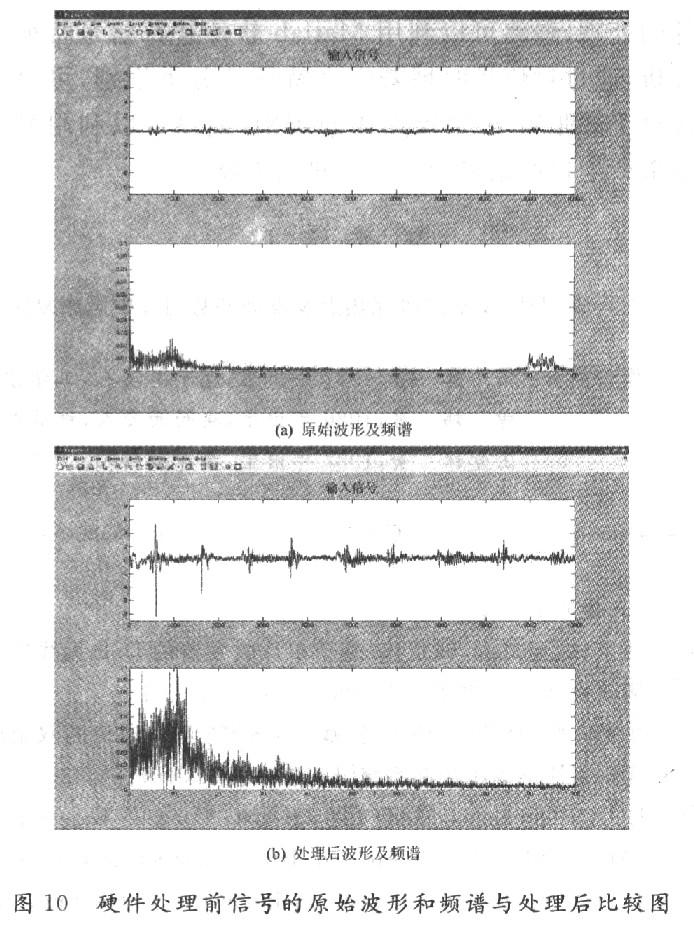
4 電路性能的實驗驗證
從圖10中可以明顯地看到,經硬件濾波以后,信號幅值被放大,原始信號的高頻噪音部分被濾除,信號特征更為明顯。
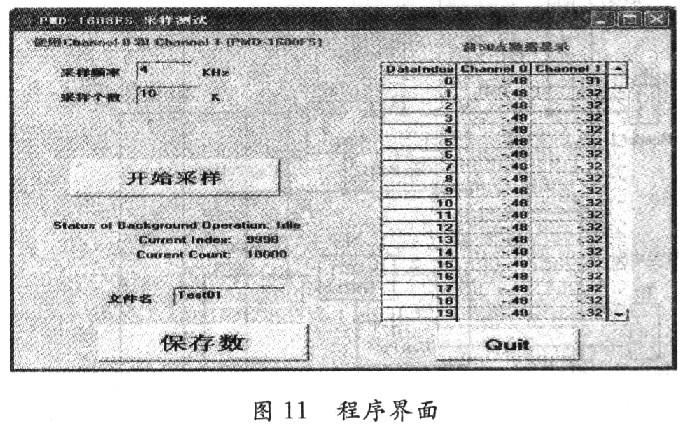
5 肌音信號軟件處理初步介紹
采集軟件是基于原采集卡軟件的VB程序。因為原采集卡軟件采集頻率和數據量都有限制,現用的VB程序在功能上對原軟件進行了補充,滿足了本系統的采集要求,因此予以采用。程序的界面如圖11所示。該程序將采集的數據以txt格式保存于指定目錄下。最終將用Matlab軟件調用txt文件中的數據,利用Mat-lab軟件強大的分析功能完成信號數據的分析。
6 結語
利用肌音信號作為信號源,通過對傳感器、放大電路、濾波電路、電源模塊、A/D轉換等幾個方面的詳細介紹,得到了采集理想肌音信號的采集系統設計過程。采集到的信號平穩清晰,噪音基本濾除,通過對采集軟件的處理,最終可以利用Matlab軟件進行信號特征的分析,通過對信號時域若干個特征的分類識別,可以實現對手部張緊一握緊等動作的辨別,最終可以利用辨別結果產生控制信號對仿生手進行控制。
-
傳感器
+關注
關注
2562文章
52450瀏覽量
762987 -
放大電路
+關注
關注
105文章
1813瀏覽量
107676 -
濾波電路
+關注
關注
47文章
650瀏覽量
70323 -
電源模塊
+關注
關注
33文章
1879瀏覽量
94047
發布評論請先 登錄
分享仿生手的設計方案
基于肌音信號的仿生手信號采集系統設計



基于labview的聲音信號采集系統設計詳細中文概述
如何DSP設計語音信號采集系統的論文說明

如何制作和控制一只仿生手






 工商網監
工商網監
評論