") 通過(guò)MC_GearIn功能模塊實(shí)現(xiàn)電子齒輪同步
通過(guò)MC_GearIn功能模塊實(shí)現(xiàn)電子齒輪同步
本文主要介紹SM3_Basic庫(kù)中的速度同步功能塊MC_GearIn,用于實(shí)現(xiàn)從軸與主軸以一定的速度比同步運(yùn)行。
硬件組態(tài)
程序
可通過(guò)MC_GearIn功能塊實(shí)現(xiàn)兩軸速度同步
進(jìn)入電子凸輪過(guò)程
第一步:主從軸使能
第二步:觸發(fā)同步功能塊
Master:主軸
Slave:從軸
Execute:上升沿觸發(fā),如果修改齒輪比需要再次觸發(fā)
RatioNumerator:電子齒輪比分子
RatioDenominator:電子齒輪比分母
Acc:進(jìn)入電子齒輪模式的加速度
Dec:進(jìn)入電子齒輪模式的減速度
Jerk:進(jìn)入電子齒輪模式的加加速度
加減速管腳的單位均為用戶單位
從軸速度=(分子/分母) * 主軸速度
分子可以為負(fù)數(shù),表示從軸反向與主軸同步運(yùn)行
電子齒輪只能保證速度同步,不能保持位置同步,如果需要實(shí)現(xiàn)位置同步,請(qǐng)使用電子凸輪
第三步:運(yùn)行主軸速度功能塊
正常情況下從軸會(huì)立即跟隨主軸運(yùn)轉(zhuǎn),可通過(guò)下面功能塊讀取從軸速度
退出電子齒輪過(guò)程
同步過(guò)程中如果直接觸發(fā)Gearout可能會(huì)出現(xiàn)不能正常停機(jī)的現(xiàn)象,建議先停主軸,然后再Gearout
-
模塊
+關(guān)注
關(guān)注
7文章
2785瀏覽量
49852 -
同步
+關(guān)注
關(guān)注
0文章
89瀏覽量
19517 -
觸發(fā)
+關(guān)注
關(guān)注
1文章
90瀏覽量
22922
原文標(biāo)題:LMC078通過(guò)SercosIII總線控制LXM32S實(shí)現(xiàn)電子齒輪
文章出處:【微信號(hào):SE_AUT,微信公眾號(hào):自動(dòng)化小天地】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
SIMULINK功能模塊的處理
瑞薩節(jié)能的“功能模塊”解決方案
求助:功能模塊和計(jì)數(shù)器間連接電路的實(shí)現(xiàn)
NK-980IoT評(píng)測(cè)EMAC功能模塊(二)
SIMULINK功能模塊的處理
SIMULINK線的處理/SIMULINK自定義功能模塊
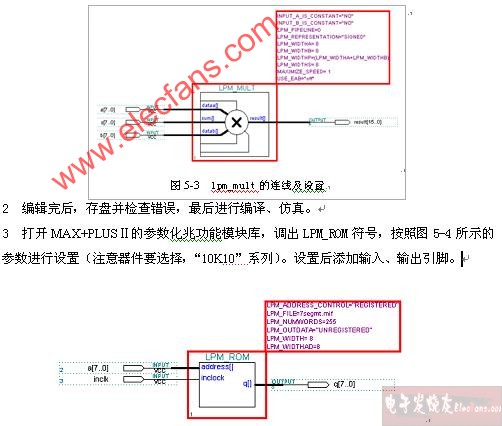
MAX+PLUSⅡ的參數(shù)化兆功能模塊庫(kù)的使用
PDA功能模塊的設(shè)計(jì)
maxim醫(yī)療電子產(chǎn)品_助聽(tīng)器功能模塊電路圖

EDA技術(shù)及其應(yīng)用-宏功能模塊應(yīng)用
QuartusⅡ中宏功能模塊的使用
關(guān)于電子標(biāo)簽的基本功能模塊淺析






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論