") 詳解Arduino Uno控制直流電機(jī)之應(yīng)用
詳解Arduino Uno控制直流電機(jī)之應(yīng)用

Arduino Uno控制直流電機(jī)
其實,三年前的東西都已經(jīng)記不清楚了。研究生沒有做硬件,相關(guān)的都快看不懂了!為了讓大家看得懂程序,將總的系統(tǒng)設(shè)計思路貼出來,如下:
整個系統(tǒng)是實現(xiàn)“太陽能智能控制環(huán)保路燈控制器設(shè)計”,主要是用直流電機(jī)控制太陽能電池板轉(zhuǎn)動,確保其在每個時間段能夠?qū)崿F(xiàn)最高的發(fā)電效率,仿向日葵實現(xiàn)東西轉(zhuǎn)動。
Arduino Uno手冊上有其關(guān)于控制直流電機(jī)的詳細(xì)介紹,如果仔細(xì)閱讀,實現(xiàn)起來很簡單的。可以結(jié)合本文的系統(tǒng),對其進(jìn)一步理解,則可以編寫響應(yīng)的代碼。
主程序
//#include
int pinI1=8;
int pinI2=9;
int pinI3=2;
//int pinI4=3;
int pinI5=4;
//int pinI6=5;
//int pinI7=6;
int speedin=11;
volatile int state=LOW;
void setup()
{
pinMode(pinI1,OUTPUT);
pinMode(pinI2,OUTPUT);
pinMode(pinI3,INPUT);
// pinMode(pinI4,OUTPUT);
pinMode(pinI5,OUTPUT);
// pinMode(pinI6,OUTPUT);
// pinMode(pinI7,OUTPUT);
pinMode(speedin,OUTPUT);
// myPID.SetMode(AUTOMATIC);
// attachInterrupt(0,light,HIGH);
}
void loop()
{
while(1)
{
int n=analogRead(A1);
int err,err1,err2;
int pidspeed1;
float kp=0.1 ,ki=0,kd=0;
err=m-n;
pidspeed1=(int)(err*kp-err1*ki+err2*kd);
err1=err;
err2=err1;
state=digitalRead(pinI3);
digitalWrite(pinI5,state);
if (m》n)
{
// while(1)
// {
digitalWrite(pinI1,LOW);
digitalWrite(pinI2,HIGH);
analogWrite(speedin,100+pidspeed1);
// }
// delay(2000);
}
else if(m
{
// while(1)
// {
digitalWrite(pinI1,HIGH);
digitalWrite(pinI2,LOW);
analogWrite(speedin,100-pidspeed1);
// delay(2000);
// }
}
1
else
{
// while(1)
// {
digitalWrite(pinI1,HIGH);
digitalWrite(pinI2,HIGH);
//delay(2000);
// }
}
}
}
這是我本科畢業(yè)設(shè)計的部分內(nèi)容,之前回答別人相關(guān)問題時留下了QQ號,這幾年總有人加我問相關(guān)的問題。今天也有一個本科生咨詢,趁這個機(jī)會,就把相關(guān)資料貼出來吧。
其實,三年前的東西都已經(jīng)記不清楚了。研究生沒有做硬件,相關(guān)的都快看不懂了!為了讓大家看得懂程序,將總的系統(tǒng)設(shè)計思路貼出來,如下:
12
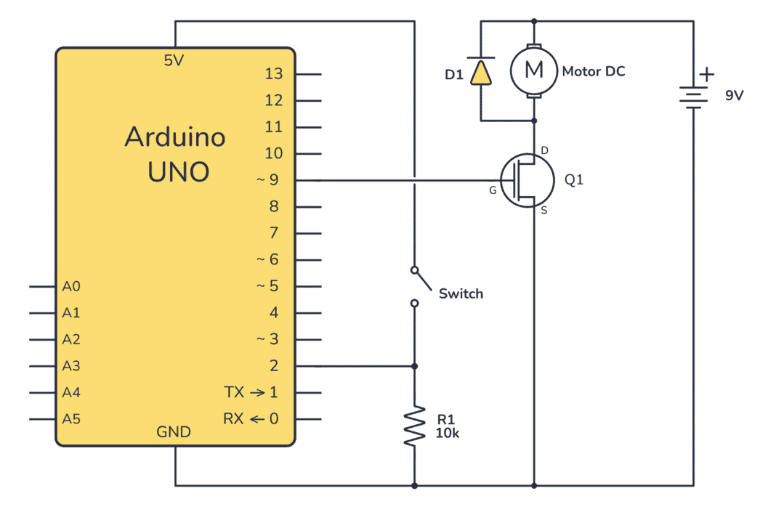
PID算法控制程序
該部分系統(tǒng)原理圖如下,有助于理解代碼,可根據(jù)應(yīng)用環(huán)境不同修改代碼:
int m=analogRead(A0);
int n=analogRead(A1);
int err,err1,err2;
int pidspeed1;
float kp=0.1 ,ki=0,kd=0;
err=m-n;
pidspeed1=(int)(err*kp-err1*ki+err2*kd);
err1=err;
err2=err1;
void light();
SetMotor(Output);
void SetMotor()
{
if (m》n)
{
digitalWrite(pinI1,LOW);
digitalWrite(pinI2,HIGH);
12345
analogWrite(speedin,100+pidspeed1);}
else if(m
{ digitalWrite(pinI1,HIGH);
digitalWrite(pinI2,LOW);
analogWrite(speedin,100-pidspeed1);}
12345
else
{digitalWrite(pinI1,HIGH);
digitalWrite(pinI2,HIGH);}
}
-
直流電機(jī)
+關(guān)注
關(guān)注
36文章
1735瀏覽量
71842 -
Arduino
+關(guān)注
關(guān)注
190文章
6498瀏覽量
192276
發(fā)布評論請先 登錄
如何使用MATLB和Arduino控制直流電機(jī)
Arduino實踐詳細(xì)說明之L298N驅(qū)動直流電機(jī)
一種arduino直流電機(jī)
如何用Arduino Uno去控制直流電機(jī)?
直流電機(jī)速度
arduino uno如何利用l298n驅(qū)動板來控制直流電機(jī)的正反轉(zhuǎn)和速度?
Arduino的直流電機(jī)調(diào)速

如何使用L298N和Arduino板控制直流電機(jī)
arduino直流電機(jī)
ros與arduino通信控制直流電機(jī)
使用Arduino的直流電機(jī)MOSFET控制速度
使用Arduino來控制直流電機(jī)
如何使用Arduino UNO和TIP120晶體管驅(qū)動和控制直流電機(jī)的速度
- 設(shè)計技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測量儀表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無線
- 接口/總線/驅(qū)動
- 處理器/DSP
- EDA/IC設(shè)計
- 存儲技術(shù)
- 光電顯示
- EMC/EMI設(shè)計
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計資源
- 設(shè)計技術(shù)
- 電子百科
- 電子視頻
- 元器件知識
- 工具箱
- VIP會員
- 最新技術(shù)文章
- 產(chǎn)品地圖
- 品牌地圖
- 供應(yīng)鏈服務(wù)
- 硬件開發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會
- 活動策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測驗
- 設(shè)計大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內(nèi)容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區(qū)合作
- 劉勇:liuyong@huaqiu.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟(jì)技術(shù)開發(fā)區(qū)航空路6號手機(jī)智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
評論