 關于汽車電子的散熱風扇控制技術
關于汽車電子的散熱風扇控制技術
在汽車電子系統之中,溫度的管理一直是個挑戰,一般會要求系統能夠正常工作在-40°C ~ + 65°C的環境溫度之下。而機殼之內的環境溫度還會有20°C左右的溫升,所以PCB板實際需要承受的最高環境溫度會高達+ 85°C。
然后,進一步著眼于局部區域,如電源、CPU等模塊將會是發熱大戶,更一步加劇了機殼內的環境溫度,嚴苛的環境實際上已經逼近很多芯片的耐溫極限了。因此,在系統設計的初期,必須規劃好熱管理(Thermal Management)策略以及設計對應的措施。
比較簡單粗暴,但是有效的散熱措施就是增加一臺散熱風扇,當然這會增加設計成本及機器噪音。所以,我們在設計風扇電路時的要求也是基于這兩個基本的出發點:
1)、電路必須簡單,低成本;
2)、風扇的轉速與噪音成正比,所以要求風扇的轉速可測、可控。系統會根據環境溫度調整風扇轉速,最好是無級調速,力求散熱效率與噪音之間的平衡。
風扇的結構:
風扇的核心部件是一只外轉子的無刷直流電機。所謂外轉子,是指線圈不動(定子),磁鐵旋轉(轉子);所謂無刷直流電機,是沒有電刷的直流電機,使用霍爾感應器代替電刷。
圖1.1 散熱用風扇
在原理上,一成不變的直流電壓是無法讓電機持續運轉的,因為它會被“異性”牢牢地吸引住,攜手到白頭。電機持續運轉的前提是,有一方必須“花心”,轉子也好,定子也行,所以轉子與定子之間“分分合合”,不斷尋找新歡,然后就轉動了起來。
當電機轉過180°時(這是相位角度,注意不是物理角度),正好線圈感應的N和S極與磁鐵的S和N異性相吸,此刻將通往線圈的電壓交換正負極,然后由“異性相吸”轉變為“同性相斥”,所以轉子又得以轉過180°,然后繼續變換正負極,電機得以持續轉動。
不斷“挑唆”線圈變換正負極的裝置叫做換相器,它可以是機械式的電刷,也可以是電子式的霍爾感應器。顯然機械式的換相器簡單,成本低,但是噪音大,有磨損,壽命短,如圖1.2示意;電子式的霍爾感應器,壽命長,但是需要專門的芯片來輔助,成本高,如圖1.3示意。
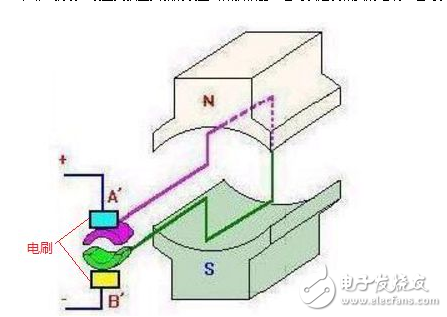
圖1.2 直流電機的工作原理模型
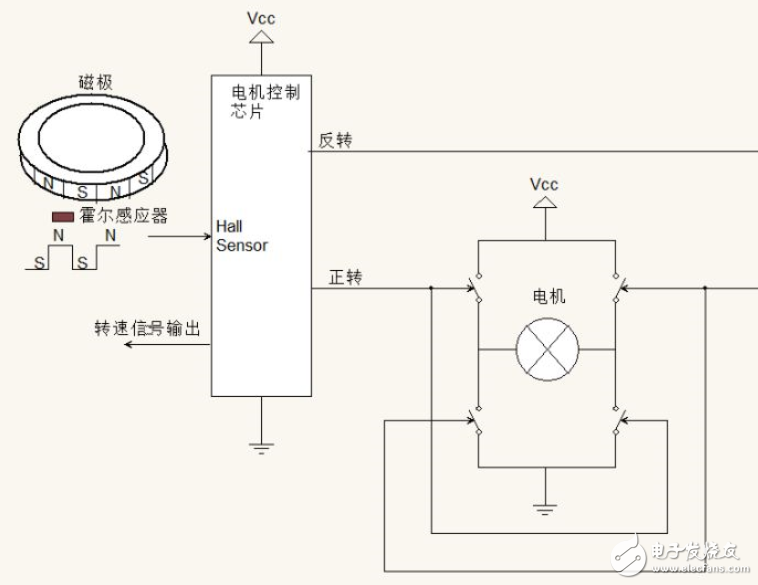
圖1.3 無刷直流電機的工作原理模型
圖1.4與圖1.5是散熱風扇的拆解,這是外轉子的無刷直流電機,轉子是磁極,定子是線圈,線圈被安裝于一個PCB基板上,基板上還有一個霍爾感應器,用于感應轉子上的磁極變化。
圖 1.4 散熱風扇拆解(正面)
圖 1.5 散熱風扇拆解(反面)
圖1.6 霍爾感應器與磁極變化
霍爾感應器頭頂上的轉子在轉動過程中,N/S磁極交錯變化,霍爾會相應的輸出高低交錯變化的信號,然后輸出信號被輸入到控制芯片進行處理,芯片據此在合適的時機進行換相操作。
轉速偵測:
霍爾輸出的信號還對應于電機的轉速,不過需要一點換算,在換算時首先需要知道一個參數,因為霍爾是對每個磁極做出反應的,所以如果知道了電機一共有多少個磁極(N和S),然后就可以換算出電機的轉速了。
風扇電機的磁極一般是4極或8極,當然可以更多,極數越多轉動越細膩、越平穩,當然這對于風扇來說沒必要。
圖1.7 電機的轉速信號的換算

圖1.7是霍爾信號的輸出與電機的轉速之間的換算關系。
RPM是每分鐘的轉速,FG是霍爾信號的頻率,FG代表每秒鐘感應到了多少次N/S磁極的交替。POLE是指一共有多少個N及S極,如4個極(2個N,2個S)以及8個極(4個N,4個S),(FG*2/POLE)是換算為每秒鐘的電機轉速,一分鐘等于60秒,所以最后再乘以60換算為常用單位RPM(轉/分鐘)。
換相機制:
支撐電機轉動的基礎原理是“異性相吸,同性相斥”。永磁鐵的磁極是固定的,在這里它是繞軸轉動的的轉子;然后,固定在基板上的線圈是定子,它隨電流方向的不同而呈現不同的極性,N或S極,它是可變性的。
首先,控制芯片通過霍爾感應器探測得知當前在線圈附近的磁極極性是N還是S,然后通知線圈感應出與之相反的極性。轉子聞到了異性的味道,會立刻傻傻地跑過去。當轉子剛好跑到線圈的中心位置的時候,控制芯片又立刻通知線圈再次變性,成為與轉子同性。可想而知,轉子十分“惱火”,遠看以為是一個大美女,跑到跟前一瞧,“靠”,居然是男的!不過已經來不及了,由于慣性的原因,轉子已經跨越了中心線。而與之相鄰的磁極正在向線圈靠近,因為它是異性的,所以她瞧見的是一位“大帥哥”正在等她,于是她加速、主動地追了過來,當然結果也是令人失望的,然后拂袖而去,接著又有新的磁極再次“上當”。如此周而復始,轉子就在控制芯片的“哄騙”之下,轉動了起來。
如此調侃電機的換相過程,雖不嚴謹,但是原理上基本就是如此,如圖1.8示意。
圖1.8 電機線圈的換相
風扇電機的控制電路:
常用的風扇有兩種,一種是自帶控制電路的,外部只需輸入PWM信號即可完成速度的調節,這種風扇的接口一般是四根線的(VCC,GND,PWM,FG);另一種是三線的(VCC,GND,FG),需要外部自己設計一個速度調節電路來完成速度的調整。
電機的轉速與輸入電機的電流大小成正比,控制電流成本高,所以一般是直接調整電壓來實現轉速調節。為了和單片機的數字接口相配合,電路的輸入端是PWM輸入,輸出是線性的電壓輸出,圖1.9是原理示意圖,實際上這是一個輸出電壓可變的線性穩壓器電路。
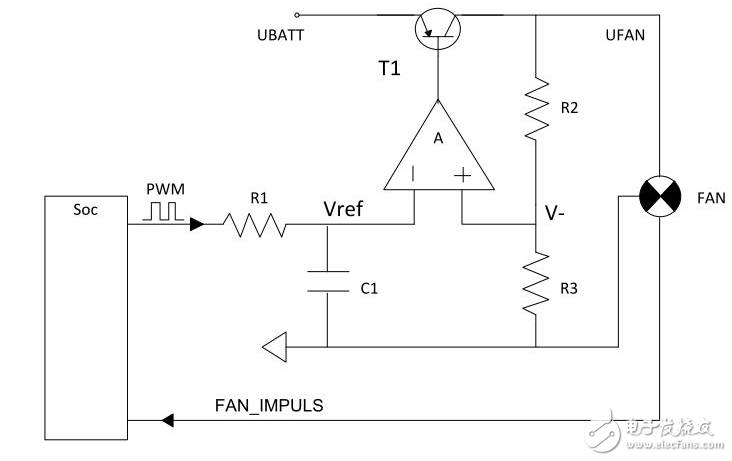
圖1.9 電機的速度調節電路
有時候,風扇電路的速度的調節只需要幾個簡單的檔位,圖1.10是兩個檔位的風扇控制電路,只需要實現“快速”或“慢速”即可,當然稍加改進是可以實現無級調速的(FAN_SPEED改為PWM輸入,然后LDO的Adj管腳處加電容)。
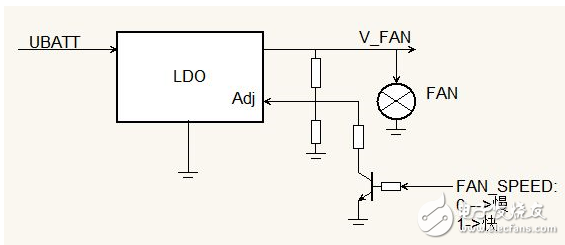
圖1.10 兩檔風扇控制電路
圖1.10使用一個LDO來做風扇的速度控制,顯得成本比較高,而圖1.11是低成本的無級調速控制電路,在這里使用了一套三極管電路來實現了LDO的功能,雖然性能不如集成電路級別的LDO,但是對于風扇控制來說已經足夠了。
如圖1.11,三極管T1與R4及C2組成的低通濾波器完成一個簡易的數模轉換電路,不同占空比的PWM信號通過它被轉化為模擬電壓輸出,同時它也被用作由T2實現的線性穩壓器的參考電平。這是一個參考電平可調的LDO,調節PWM占空比即可達到調節輸出電壓的目的。
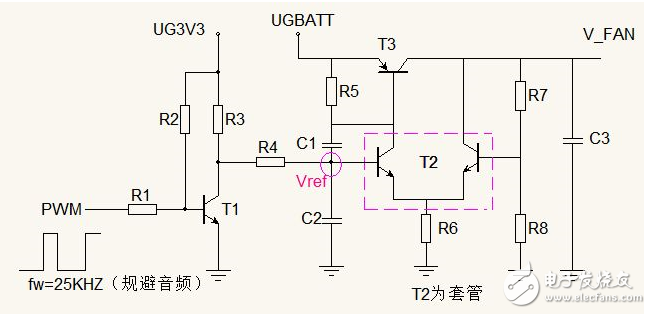
圖1.11 電機的速度無級調節電路
工作原理簡介如下:
在某一個固定占空比的PWM信號下,R6上的壓降是定值,大小等于(Vref-Vbe);R7與R8組成的分壓電路被用于監控輸出電壓的變化,目標輸出電壓等于[Vref*R8/(R7+R8)]。當輸出電壓偏高或者降低時,由R7和R8逐級上報,然后T2進行分析之后做出決策,決策由T3負責執行,這是一套負反饋系統。
分解步驟如下:
輸出電壓低于目標值==》R8的壓降低于Vref==》從套管T2在R8那側的分管流入R6的電流減小(地主家也沒有余糧了)==》R6的壓降[Vr6=(Vr8-Vbe)]降低==》T2在C2那側的分管的Vbe之間的壓差(Vref-Vr6)被拉大 ==》T2在這一側的基極電流Ib增加,填補虧空==》Ib增加意味著Ic增加(Ib乘以三極管的放大倍速)==》T2的Ic等于T3的Ib==》T3的Ic增大,T3的發射極與集電極之間的壓降Vce減小(往飽和區方向靠近)==》輸出電壓(UGBATT-Vce)增加==》反之,如果輸出電壓過沖之后的響應也可據此類推==》周而復始,直至達到新的平衡。
應用這個電路時,需要注意的要點主要有以下兩點:
1)、占空比與輸出電壓之間的線性關系區域有限,在應用前做好仿真,最后經過實測。
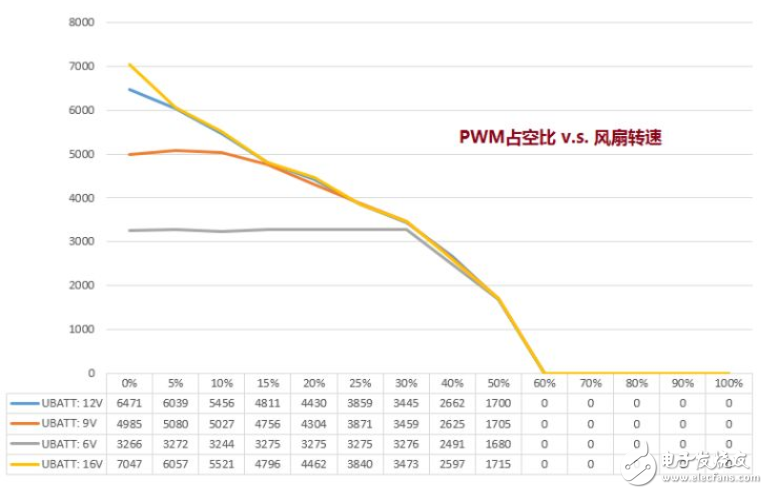
圖1.12,PWM占空比與風扇轉速之間的關系
2)、線性區域的范圍可以通過R5進行微調,R5對T3有保護作用,所以不建議摘除R5。
圖1.13, R5的選值與線性區間的關系
如圖1.14,通過R6也可以微調線性區域,但是R6對電路穩定性影響比較大,不建議隨意變動。
圖1.14, R6的選值與線性區間的關系
3)、這套電路的監督、反饋機制是比較弱的,從監督到執行,再到具體落實的過程,電路的控制力比較弱,原因是由T2組成的決策機構的增益不足,也就是說電路的直流增益比較小,后果是穩態誤差比較大,特別當負載電流變化比較大的時候,如風扇。所以,由集成電路實現的LDO會使用運算放大器代替T2,因為運放的增益很大,如圖1.9示意。
直流增益小的后果是,特性曲線表現疲軟,帶載能力弱,如圖1.15示意。當負載的需求波動比較大的時候,電路響應慢,對誤差的控制能力弱,所以輸出電壓也會隨負載波動而波動。我們知道風扇是感性負載,她的脾氣(對電流的需求)是感性的,圖1.16是實測的電壓波動波形。
圖1.15, 風扇控制電路的帶載能力
放大細節:
圖1.16,風扇在運轉時的電壓波動
4)、不過,風扇控制的并不要求很精確,所以這個電路應用起來沒有問題,不過需要防范風扇的“脾氣”發泄到隔壁負載上去,避免由感性負載所產生的噪音對系統其它模塊產生的干擾。
避免干擾的做法就是增加濾波器,在常規的電源設計之中,一般會在靠近負載端就近擺放一個濾波器。這樣做的目的是為了保證進入負載的電源是干凈的,特別是當負載是“敏感體質”的模擬電路,如圖1.17。
圖1.17,負載的輸入濾波器設計
但是,對于風扇來說,濾波器的擺放需要顛倒過來,風扇是“熊孩子”,我們需要防止他對別人的傷害,如圖1.18。
圖1.18,風扇的輸入濾波器設計
-
pcb
+關注
關注
4358文章
23442瀏覽量
407698 -
汽車電子
+關注
關注
3036文章
8273瀏覽量
169722 -
散熱風扇
+關注
關注
3文章
43瀏覽量
12235
發布評論請先 登錄
蘋果獲得Macbook Pro非對稱散熱風扇設計專利
散熱風扇的接線數量所代表的含義
CPU散熱風扇電機霍爾 HE22AF1D12 無刷直流電機和直流散熱風扇霍爾 HE22AF1D12
【直播課件】電機芯課堂:服務器散熱風扇驅動控制方案
建準散熱風扇的用途以及優勢在哪里?
【直播課件】【FT8132】電機芯課堂: 如何應用三相ASIC快速調試散熱風扇方案
深度剖析筆記本散熱模塊的散熱風扇技術
為何新能源車動力電池充電樁散熱系統常用散熱風扇







 工商網監
工商網監
評論