") 步進(jìn)電機(jī)驅(qū)動(dòng)控制板
步進(jìn)電機(jī)驅(qū)動(dòng)控制板

一、板子跳線器說(shuō)明:所有跳線都在左邊,則由單片機(jī)控制。
1、靠近光偶的短路冒打在CLK-555方向時(shí)有板上的555提供時(shí)鐘給驅(qū)動(dòng)器;打在CLK-CPU時(shí)右用戶CPU提供時(shí)鐘給驅(qū)動(dòng)器。
2、JT5打在右邊:297的HALF/FULL(全速/半速)腳接GND了 默認(rèn)為FULL模式了;JT5打在左邊:297的HALF/FULL腳空了 電機(jī)模式用戶自己控制。
3、JT6打在右邊:297的CW/CCW腳(方向)接GND了 默認(rèn)為順時(shí)針轉(zhuǎn)動(dòng)模式了;JT6打在左邊:297的CW/CCW腳空了 電機(jī)正反轉(zhuǎn)模式用戶自己控制。
二、按鍵說(shuō)明:
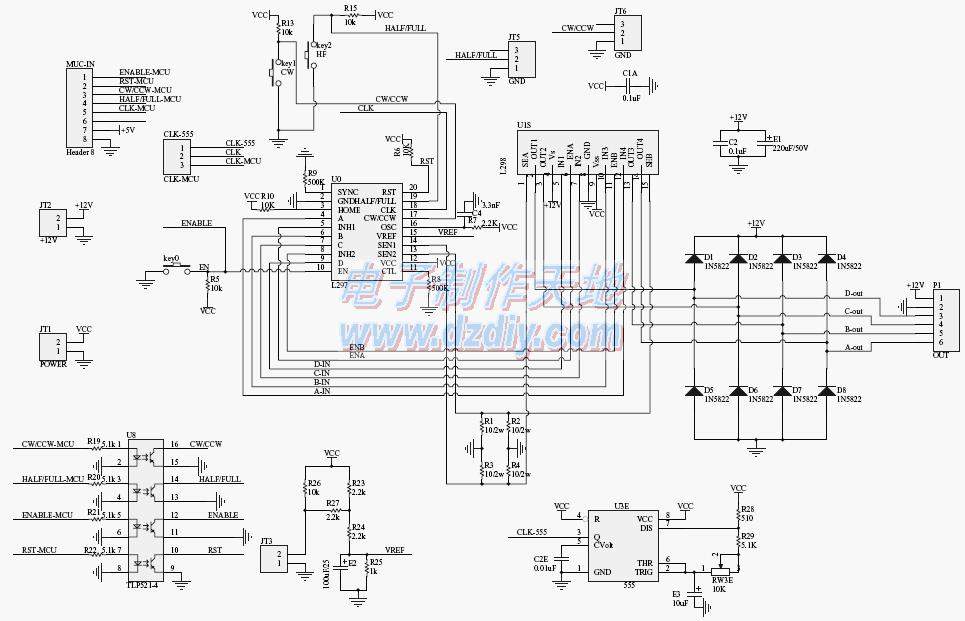
板子使用全新的L297作為控制芯片 L298作為驅(qū)動(dòng)芯片 板載NE555時(shí)鐘電路為L(zhǎng)297提供CLK因此 該版在不需要外部控制的情況下就可以工作 板載3個(gè)控制按鍵
EN - 使能
CW - 反向旋轉(zhuǎn)
HF - 半速旋轉(zhuǎn)
通過(guò)按鍵就可以直接控制電機(jī)的正反轉(zhuǎn)、全速/半速和使能。
三、基本功能描述:
通過(guò)光藕隔離之后將CLK CW HF EN四個(gè)基本控制端引出單片機(jī)等可以非常方便的控制電路的工作這個(gè)板子改進(jìn)的地方比較多也方便研究使用。板子使用1N5822快速二極管作為續(xù)流器件 其速度要遠(yuǎn)遠(yuǎn)快于整流橋的 L298和電機(jī)能夠提供更完善的有效的保護(hù)。模塊供電+5V(L297和L298控制供電) +12V(根據(jù)電機(jī)最低4V最高16V)給電機(jī)供電。
電機(jī)輸出接口包括: +12V 四相輸出 GND(請(qǐng)根據(jù)您的電機(jī)連接)。
控制輸入接口包括: GND CLK EN CW HF。
EN:高電平停止,低電平使能。
RET:高電平停止,低電平使能。
C/CW:高電平逆時(shí)針,低電平順時(shí)針。
H/HD:高電平全速,低電平半速。
CLK:時(shí)鐘脈沖。
需要特別說(shuō)明的是:為了測(cè)試方便 在板子上設(shè)置了NE555構(gòu)成的一個(gè)低頻時(shí)鐘源(使用時(shí)跳線冒打在CLK-555處),當(dāng)您使用外部的時(shí)鐘信號(hào)控制電機(jī)的轉(zhuǎn)速時(shí)必須跳線冒打在CLK-CPU處 否則外部時(shí)鐘是不會(huì)傳到L297里面。
四、接口說(shuō)明:
1、板子左上方小二接口(JT1) VCC接+5V、GND接電源地,次處為芯片L297和555芯片的工作電壓;
2、板子左中方小八接口(MCU-IN)為光藕隔離的信號(hào)分別為:EN(使能)、RET(復(fù)位)、C/CW(正反控制)、H/FU(全速/半速)、CLK(時(shí)鐘信號(hào)) +5V(光藕工作電壓) 注意:如果沒(méi)有用CPU控制,小八接口(MCU-IN)的信號(hào)可以不接任何東西。
3、JT2為298的工作電壓也是驅(qū)動(dòng)電機(jī)的工作電壓(接+12V)
注意:板子推薦的最高電機(jī)供電電壓在4V~18V之間 最大工作電流不超過(guò)2A 否則L298的耗散功率會(huì)過(guò)大 導(dǎo)致發(fā)熱嚴(yán)重 這種情況下通過(guò)風(fēng)冷等措施 可以提高最大工作電流到2.5A左右。
4、OUT為電機(jī)的四相信號(hào)線 A B C D
相關(guān)程序:
// 控制線接到MCU的P1口 獨(dú)立鍵盤(pán)的接口接到MCU的P2口。
// KEY0- 右運(yùn)動(dòng)一步; KEY1- 左運(yùn)動(dòng)一步;
// KEY2- 右運(yùn)動(dòng)200步; KEY3- 左運(yùn)動(dòng)200步
// KEY4- 右運(yùn)動(dòng)1000步;
#include
#include
#define uint unsigned int
#define uchar unsigned char
sbit en=P1^0; // 定義P1.0口
sbit rst=P1^1; // 定義P1.1口
sbit ccw=P1^2; // 定義P1.2口
sbit hf=P1^3; // 定義P1.3口
sbit clk=P1^4; // 定義P1.4口
sbit k1=P1^5; // 定義P1.5口
sbit k2=P1^6; // 定義P1.6口
void ShortDelay(void)
{ uchar x,y;
for(x=0;x《5;x++)
for(y=0;y《125;y++)
_nop_();
return;
}
void outclk(uint a)
{ uint i,j;
while(a--)
{ en=1; // 定義P1.0口
rst=1; // 定義P1.1口
//if((k1&k2)!=0) // K1,K2限位置判斷
// {
clk=1;
for(i=150;i》0;i--) //200
for(j=150;j》0;j--); //200
clk=0;
// }
// else {rst=1;en=0;}
}
}
uchar key(void)
{uchar key_num;
if( ( P2 & 0x3f) != 0x3f ) //判斷按鍵
{
ShortDelay(); //消除抖動(dòng)
if( ( P2 & 0x3f ) != 0x3f )
{
switch ( P2 & 0x3f ) //將按鍵碼轉(zhuǎn)換成鍵值
{
case 0x3e: return key_num=01;
case 0x3d: return key_num=02;
case 0x3b: return key_num=03;
case 0x37: return key_num=04;
case 0x2f: return key_num=05;
case 0x1f: return key_num=06;
default : return key_num=00;
}
}
}
return key_num;
}
void main(void)
{ uchar b;
while(1)
{
b= key();
switch(b)
{ //4步走1CM設(shè)定走5Cm 半應(yīng)該是200的為了調(diào)整誤差所以少4步 (10CM為多8步)
case 00:rst=1;break;//0
case 01:ccw=1; outclk(1);break;//1 右運(yùn)動(dòng)1步
case 02:ccw=0; outclk(1);break;//2 左運(yùn)動(dòng)1步
case 03:ccw=1; outclk(200);break;//3 右運(yùn)動(dòng)1CM
case 04:ccw=0; outclk(200);break;//4 左運(yùn)動(dòng)1CM
case 05:ccw=1; outclk(1000);break;//5 右運(yùn)動(dòng)5CM
//case 06:ccw=0; outclk(1000);break;//6 左運(yùn)動(dòng)5CM
default:break;
}
}
}
實(shí)物圖:
-
單片機(jī)
+關(guān)注
關(guān)注
6067文章
44992瀏覽量
650679 -
驅(qū)動(dòng)器
+關(guān)注
關(guān)注
54文章
8697瀏覽量
150022
發(fā)布評(píng)論請(qǐng)先 登錄
labview和單片機(jī)結(jié)合,控制步進(jìn)電機(jī)。
labview 和51單片機(jī)和步進(jìn)電機(jī)
四軸步進(jìn)電機(jī)運(yùn)動(dòng)控制板開(kāi)發(fā)
tmcm-6110的步進(jìn)電機(jī)控制板有何功能
步進(jìn)電機(jī)驅(qū)動(dòng)控制板MT232V10資料合集V1.1
步進(jìn)電機(jī)伺服電機(jī)控制板簡(jiǎn)介
控制板的分類(lèi)
無(wú)刷直流電機(jī)驅(qū)動(dòng)控制板

樹(shù)莓派使用Python控制步進(jìn)電機(jī)
步進(jìn)電機(jī)控制器的應(yīng)用設(shè)置
步進(jìn)電機(jī)控制板開(kāi)源
步進(jìn)電機(jī)驅(qū)動(dòng)板,這些功能你都知道嗎?
步進(jìn)電機(jī)控制器電路圖 步進(jìn)電機(jī)控制器的分類(lèi)及其特點(diǎn)

探索步進(jìn)電機(jī)驅(qū)動(dòng)IC的創(chuàng)新融合






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論