 一個關于自動駕駛圖像理解系統的技術性問題
一個關于自動駕駛圖像理解系統的技術性問題
可靠的圖像理解系統對于自動駕駛、醫學成像等應用至關重要。對抗樣本被認為是一種有針對性的小型擾動。約克大學和多倫多大學的研究者在本文中展示了另一種擾動。與對抗樣本相反,這些擾動不受范數的約束。它們把一幅圖像中的物體放置(「移植」)到另一幅圖像的新位置。這種做法對目標檢測器的結果有多種非局部影響,比如房間里走動的大象讓目標檢測器把沙發認成椅子,或讓杯子、書消失。本文通過一系列實驗證明了這一點,并提出了一些可能的解釋。
實驗
作者從一些定性結果開始。圖 1(a)展示了一種當前最優目標檢測方法(具備 NASNet 骨干網絡 [20] 的 Faster-RCNN [9])應用于來自 Microsoft COCO 目標檢測基準 [6] 的客廳圖像的結果,目標檢測器是在該基準數據集上訓練的。作者利用真實數據,從另一幅圖像中提取了一個目標(大象)及其掩碼,并將其「移植」到客廳圖像的不同位置上。作者把移植的目標稱為 T。結果可以在圖 1 b-i 中看到。當目標 T 沿著圖像平移時,作者發現了幾個有趣的現象:
檢測不穩定:目標有時無法被檢測到,或者能夠被檢測到但置信度出現急劇變化。
目標 T 被檢測到的身份不一致(在圖 1-f 中被當成椅子):根據位置變化,目標可能被檢測為各種不同的東西。
目標帶來非局部影響:未與 T 重疊的目標可能會變換類別、邊界框,或者完全消失。
圖 1:在房間中檢測一只大象。(a): 當前最優目標檢測器在客廳圖像里檢測到多個目標;(b,d,e,g,i):移植的目標(大象)在很多情況下和任意位置未被檢測到;(f): 目標類別被誤認為是「椅子」。該目標(大象)具有非局部影響,導致其它目標消失(圖 d、f 中的杯子,e、i 中的書)或變換類別(圖 e 中的椅子被誤認為是沙發)。
論文
摘要:我們展示了一系列當前最優目標檢測器的常見故障。這些故障是通過用包含訓練目標的另一個子圖像替換圖像子區域而獲得的。我們將這種做法稱為「目標移植」(object transplanting)。結果表明,以這種方式修改圖像會對目標檢測造成非局部影響。根據目標檢測器的結果,目標位置的微小變化會影響目標以及圖像中其他對象的類別確認。對此,我們提供了一些分析,并提出了一些可能的解釋。
實驗中采用的圖像均來自 MS-COCO 數據集 2017 版的驗證集。除非另有說明,我們采用的所有模型均來自 Tensorflow 目標檢測 API [5]。因此,我們的實驗易于復現,并且可以訪問一組不同的當前最優目標檢測架構。此外,如無特殊情況,我們僅使用在 MS-COCO 上訓練的模型。這些模型可以從相應的 API 網頁下載,還可以利用官方提供的代碼將模型應用于圖像。表 2 列出了我們使用的模型。
測試圖像生成: 圖 1 中的例子看起來有點不自然,我們提供了更多隨機生成的例子。簡而言之,通過挑選一對隨機圖像 I、J,將隨機目標從圖像 J 移植到圖像 I 中,然后測試目標檢測的效果。
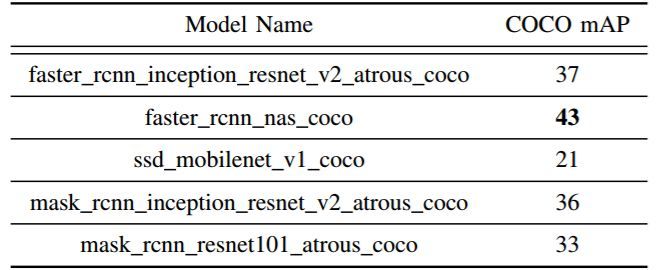
表 2:實驗中所用模型,及其平均準確率(mAP)
共現目標
我們已經展示了隨機選擇一對圖像和待移植目標的結果。可以說,想讓一個從未在同一圖像中看到兩個類別組合的網絡能夠在測試時成功地處理此類圖像有點期望過高。我們認為,無論是在實際中還是理論上,要求每對目標類別在訓練集中共現都是不合理的。當然,這對人類來說要求不高。人類不依靠語境也能識別物體,盡管需要的時間更長 [2]。
然而,我們現在轉向生成另一個極端的圖像:我們從圖像中復制一個目標,并將其復制到同一圖像中的另一個位置。圖 2 顯示了 4 幅隨機挑選圖像的生成圖像的檢測結果。我們看到,這種效果也發生在這些圖像上。部分遮擋和語境似乎在這里發揮了作用。例如,在(b)欄的最下面一行,當靠近電視機時,牛的腳會變成「遙控器」。當植物的一部分被遮擋(d 欄,最后 2、3 行),但一個人的手在附近時,植物的底部被檢測為手提包或杯子。圖 2 中的結果都是使用 faster_rcnn_nas_coco 模型生成的。
圖 2:把目標從圖像的某個位置移植到該圖像另一位置的效果。最上一行:原始檢測。后續每一行:通過復制移植目標,相對于前一行新檢測到的目標。
特征干擾
以下將展示特征干擾對檢測過程的不利影響,這可能是對檢測誤差的合理解釋。例如,考慮圖 3(a)中的檢測結果。一只部分可見的貓被檢測到并歸類為斑馬。我們證實,從不屬于實際目標(cat)的像素中獲得的特征對指定的類有影響。這點同樣適用于目標感興趣區域(ROI)以內及以外的像素:在圖 3(b)中,我們將邊界框外的所有像素都設置為零。檢測結果不變。當我們把邊界框內的像素也歸零,留下屬于貓的像素時,得到的標簽也會變成「貓」。這顯示了 ROI 內像素的影響。然而,當我們將 ROI 之外的背景強度隨機化時,標簽會變成「狗」。這表明 ROI 之外的特征會影響檢測的最終結果。此次實驗是用 Yolov3[8] 方法的 PyTorch 端口執行的,速度非常快,產生的結果與目標檢測的最新水平相當。這種情況下的最終分類需要依賴來自卷積層單個網格單元的特征。
圖 3:特征干擾。(a):一只部分可見的貓被檢測為斑馬;(b):丟棄檢測邊界框外的所有像素并不能固定對象的分類,這表明 ROI 內的特征可能會導致混淆;(c):丟棄 ROI 內的所有非「貓」像素也會導致固定的分類;(d):在邊界框之外的范圍內添加隨機噪聲再次導致錯誤的檢測結果,顯示了 ROI 外特征的影響。
超出檢測范圍的全局影響
在一項初步實驗中,我們將幾張沒有檢測到任何物體的圖像上傳至谷歌的 Vision API 網站。這些圖像是任意挑選的。本文中呈現出實驗結果,因為我們發現它值得進一步探索。似乎其方法的 OCR 部分對移植目標也表現出驚人的非局部影響。圖 4 顯示了這一點:鍵盤放置在圖像的兩個不同位置。盡管每個位置中鍵盤都遠離標志,但在每種情況下,標志的檢測結果都是不同的。
圖 4:谷歌 OCR 上目標移植的非局部影響。放置在圖像中兩個不同位置的鍵盤會導致對右側標志中文本的不同解釋。頂部圖像的輸出是「dog bi」,底部是「La Cop」。
討論
我們提出了當前目標檢測器出現這些奇異行為的幾個可能原因。盡管我們報告了很多種現象,我們相信這些現象不是獨立的,某些現象之間存在一些共同的潛在原因。
部分遮擋:人們普遍認為部分遮擋目前仍然是目標檢測器的一大挑戰。能應對部分遮擋被認為是泛化的良好信號。實際上,我們測試的很多現代目標檢測器都對部分遮擋具備很高的魯棒性。
上下文推理:對目前的目標檢測器而言,明確地考慮語義級別的上下文并不常見,這意味著目標類別之間的相互作用以及它們的相對空間布局(或可能的額外關系)是被編碼在網絡的推理過程中的。盡管很多方法聲稱整合了上下文推理,但更多地是在特征層面上,意味著全局圖像信息在某種程度上編碼在每一次推斷中。這和以前流行的明確使用上下文推理的研究相反。
特征干擾:現代目標檢測器使用從卷積層中獲得的特征來生成最終的目標類別和邊框預測。這些區域的尺寸是固定或矩形的。
感興趣區域是矩形的。這意味著不屬于目標的區域部分也會被池化,包括背景外觀以及目標外觀。
特征圖的每個部分可能擁有一個很大的有效感受野。在實踐中,這意味著特征是從檢測目標的邊框以外池化得到的。
一方面,來自目標周圍的特征可以提供有用的語境線索來提升目標檢測,特別是對于那些由于尺寸、部分遮擋等原因而不能提供足夠信息的目標。另一方面,一味將額外特征混合至最終類別分數可能會影響結果的正確性。
其它可能原因還包括:超出樣本分布、缺乏信號完整性、非極大值抑制等。
我們相信特征干擾(如圖 3 所示)可能是多數觀察到的現象的根本原因,而那些由于部分遮擋或語境推理導致的現象則可能是該問題的特殊案例。
-
圖像
+關注
關注
2文章
1089瀏覽量
40592 -
自動駕駛
+關注
關注
785文章
13945瀏覽量
167108
原文標題:一個關于自動駕駛圖像理解系統的技術性問題
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論