 探析CAN總線在駕駛系統中的重要作用
探析CAN總線在駕駛系統中的重要作用

CAN總線目前已廣泛應用在汽車電子領域,在整個自動駕駛駕駛系統中也有著十分重要的作用,自動駕駛汽車上的某些傳感器(如雷達、Mobileye)的信號傳遞也是通過CAN實現的。本文就帶大家了解一下CAN總線。
CAN 是Controller AreaNetwork 的縮寫,中文名為控制器局域網絡,是ISO國際標準化的串行通信協議,是一種用于實時應用的串行通訊協議總線,它可以使用雙絞線來傳輸信號,是世界上應用最廣泛的現場總線之一。
因其具有高性能、高可靠性的通信機制,目前已廣泛應用在汽車電子領域,CAN協議用于汽車中各種不同元件之間的通信,以此取代昂貴而笨重的配電線束。因此CAN總線在整個自動駕駛系統中也有著十分重要的作用,自動駕駛汽車上的某些傳感器(如雷達、Mobileye)的信號傳遞也是通過CAN實現的。
CAN 總線技術發展歷程
CAN 總線最早是由德國 Bosch 公司在 1986 年為汽車監測和控制而設計,主要用于汽車內部測量與執行部件之間的通信。自寶馬公司 1989 年推出第一款使用 CAN-BUS的汽車后,CAN 總線就開始了其輝煌的歷程。CAN 的高性能和可靠性已被認同,并被廣泛地應用于工業自動化、船舶、醫療設備、工業設備等方面。CAN總線是當今自動化領域技術發展的熱點之一,被譽為自動化領域的計算機局域網。它的出現為分布式控制系統實現各節點之間實時、可靠的數據通信提供了強有力的技術支持。
CAN通信實時性與可靠性
CAN 總線從誕生之初就憑借著其優良的實時性與可靠性迅速發展成為現場總線的領航者,但它仍存在一些缺陷。CAN 總線通信采用載波監聽無損的仲裁技術,在網絡負載較小時,CAN 總線實時性可以滿足各方面的需求,但隨著網絡負載不斷增大,信息在總線上碰撞的概率也隨之增大,如果繼續使用基本的 CAN 協議,優先級較低的信息發送的實時性就會受到影響,網絡負載到達一定程度后甚至會退出總線競爭。CAN總線協議采用靜態固定優先級分配方式,這樣不同優先級的信息就很難公平的共享總線使用權,這些缺陷成為制約其進一步發展的問題。
CAN總線的基本工作原理
CAN協議的特性包括完整性的串行數據通訊、提供實時支持、傳輸速率高達1Mb/s、同時具有11位的尋址以及檢錯能力。
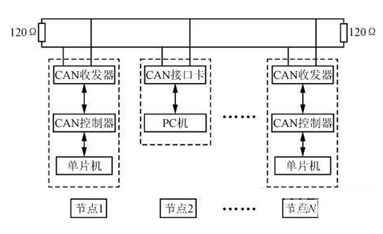
CAN總線用戶接口簡單,編程方便。網絡拓撲結構采用總線式結構。這種網絡結構簡單、成本低,并且采用無源抽頭連接,系統可靠性高。通過CAN總線連接各個網絡節點,形成多主機控制器局域網(CAN)。
信息的傳輸采用CAN通信協議,通過CAN控制器來完成。各網絡節點一般為帶有微控制器的智能節點完成現場的數據采集和基于CAN協議的數據傳輸,節點可以使用帶有在片CAN控制器的微控制器,或選用一般的微控制器加上獨立的CAN控制器來完成節點功能。傳輸介質可采用雙絞線、同軸電纜或光纖。
如果需要進一步提高系統的抗干擾能力,還可以在控制器和傳輸介質之間加接光電隔離,電源采用DC-DC變換器等措施。這樣可方便構成實時分布式測控系統。微控制器,或選用一般的微控制器加上獨立的CAN控制器來完成節點功能。傳輸介質可采用雙絞線、同軸電纜或光纖。如果需要進一步提高系統的抗干擾能力,還可以在控制器和傳輸介質之間加接光電隔離,電源采用DC-DC變換器等措施。這樣可方便構成實時分布式測控系統。
自動駕駛系統如何解析CAN總線的數據
本段主要討論無人駕駛系統獲取到CAN消息后,如何根據CAN協議,解析出想要的數據?
從CAN總線中解析出傳感器的信息,是每個自動駕駛工程師,甚至每一個汽車電子工程師必備的技能。
認識CAN消息
以百度推出的Apollo開源的代碼為例做CAN消息的講解,我們先看到每一幀的CAN消息是如何被定義的。
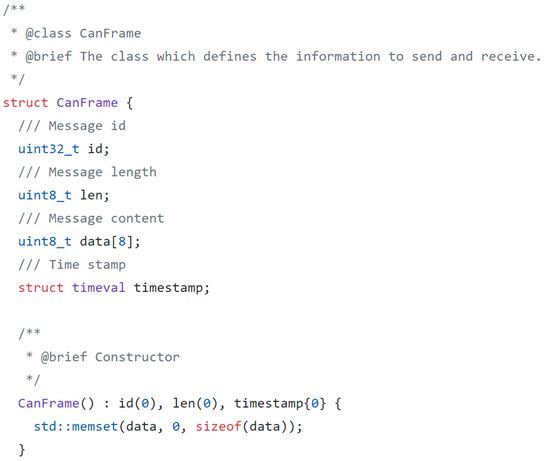
可以看到這個名為CanFrame的消息結構中包含4個關鍵信息,分別是:
1.uint32_t id (CAN消息的ID號)
由于CAN總線上傳播著大量CAN消息,因此兩個節點進行通信時,會先看id號,以確保這是節點想要的CAN消息。最初的CAN消息id號的范圍是000-7FF(16進制數),但隨著汽車電控信號的增多,需要傳遞的消息變多,信息不太夠用了。工程師在CAN消息基礎上,擴展了id號的范圍,大大增加了id號的上限,并將改進后的CAN消息稱為“擴展幀”,舊版CAN消息稱為“普通幀”。
如果拿寫信做比較,這個id就有點類似寫在信件封面上的名字。
2.uint8_t len(CAN消息的有效長度)
每一幀CAN消息能夠傳遞最多8個無符號整形數據,或者說能夠傳遞8*8的bool類型的數據。這里的len最大值為8,如果該幀CAN消息中有些位沒有數據,這里的len就會小于8。
3.uint8_t data[8](CAN消息的實際數據)
正如剛才提到的,每一幀CAN消息都包含至多8*8個bool類型的數據,因此可以通過8*8個方格,可視化CAN消息中的data。如下圖所示:
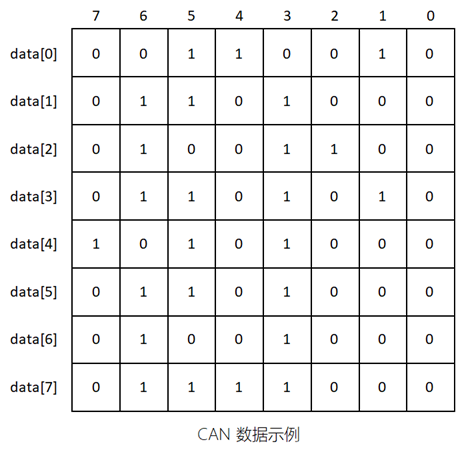
在沒有CAN協議幫助我們解析的情況下,這里的數據無異于亂碼,根本無法得到有用的消息,這也是CAN消息難以破解的原因之一。
4.timestamp(CAN消息的時間戳)
時間戳表示的是收到該CAN消息的時刻。通過連續多幀的時間戳,可以計算出CAN消息的發送周期,也可以用于判斷CAN消息是否被持續收到。
綜上,每幀CAN消息中最重要的部分其實是data,即8*8的bool值。所謂解析CAN消息,其實就是解析這8*8個bool類型的值。
認識CAN協議
目前業界的CAN協議,都是以后綴名為dbc的文件進行存儲的。德國Vector公司提供CANdb++ Editor是一款專門用于閱讀dbc文件的軟件。
如下圖所示,為Mobileye提供的車道線的dbc文件。(文末提供CANdb++ Editor安裝包和Mobileye車道線的dbc文件的獲取方法)
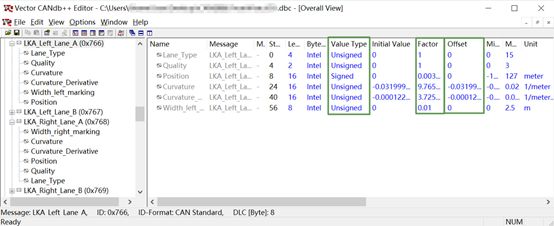
以id號為0x766的LKA_Left_Lane_A為例,這是Mobileye檢測無人車左側車道線的部分信息,包括了左側車道線的偏移量,曲率等。該幀CAN消息(Message)中的五個信號(Signal),分別是Lane_Type、Quality、Curvature、Curvature_Derivative、Width_left_marking、Position。
每個信號的具體描述顯示在軟件右側,其中與解析直接相關的三個要素已用綠色框選中。
1.Value Type(Unsigned或Signed)
某些物理量在描述時是有符號的,比如溫度。而描述另外一些量時,是沒有符號的,即均為正數,比如說曲率。
2.Factor 和 Offset
這兩個參數需要參與實際的物理量運算,Factor是倍率,Offset是偏移量。例如Lane_Type和Quality信號的Factor為1,Offset為0,而其他信號的Factor均為小數。具體的計算方法請往下看。
雙擊LKA_Left_Lane_A,打開Layout頁,會發現很熟悉的方塊陣列,如下圖所示。
工程師真正關心的恰好是這塊彩色圖,因為該圖上的每個小方塊和data中的每一個bool量一一對應。這就是CAN協議的真面目。
解析CAN信號
由于彩色方塊圖與data是一一對應的,我們將兩個圖疊加,將得到如下圖所示的data圖。
每個信號物理量的計算公式為:
1.Factor為1的物理量
由于Lane_Type和Quality的Factor為1,Offset為0,因此十進制值為多少,實際物理量即為多少。
從圖中就能直接看出Quality這個信號占據兩個位,二進制數11,換算為十進制是3(1*2 + 1*1);Lane_Type占據四個位,二進制數為0010,換算為十進制是2(0*8 + 0*4 + 1*2 + 0*1)。
所以這一幀信號表示此時的左車道線Lane_Type值為2,Quality值為3。對于整數值,通信雙方可以約定規則,比如Mobileye就規定了,Quality為0或者1時表示車道線的置信度較低,不推薦使用此時的值;2表示置信度中等,3表示置信度較高,請放心使用。
2.Factor為小數的物理量
對于Factor不為1的物理量,比如Position,需要使用移位的方法進行解析,但解析公式保持不變。以百度 Apollo提供的源碼為例進行講解。
這里的bytes即為CAN消息中的data,首先將Position信號所在的行取出來,將第1行的8個bool值存儲在變量t1中,將第二行的8個bool值存儲在變量t0中。由于在這條CAN消息中,Position同時占據了高8位和低8位,因此需要將第一行和第二行的所有bool位拿來計算,高8位存儲在32位的變量x中,低8位存儲在32位的變量t中。
現在需要將高8位和低8位拼接,將高8位左移8位,然后與低8位求或運算,即可得到Position的二進制值。隨后進行的左移16位,再右移16位的操作是為了將32位的變量x的高16位全部初始化為0。之后將x乘以Factor再加上Offset即可得到真實的Position值,給真實值加上單位meter,即可獲取實際的物理量。
與CAN類似的通信協議
VCU、雷達等通過CAN總線傳遞信號,隨著CAN的負載越來越高,很多傳感器選擇了其他通信方式。比如激光雷達的點云數據量太過龐大,使用的是局域網的方式進行傳遞;再比如GPS和慣導使用的是串口進行通信。
雖然通信方式和通信協議千差萬別,但解析的方法都是一樣的。
最后,提醒一下,由于不同ID的CAN消息的結構不一樣,因此工程師在寫解析代碼時,需要十分仔細,否則會給后續處理帶來想不到的bug。
-
CAN總線
+關注
關注
145文章
1987瀏覽量
132906 -
自動駕駛
+關注
關注
790文章
14326瀏覽量
170749
原文標題:自動駕駛之——CAN總線簡介
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
淺談展會宣傳推廣的重要作用

究竟終端電阻對CAN總線有什么重要作用和影響呢?


DCAC電源模塊在工業科技中的重要作用






 工商網監
工商網監
評論