") 霍爾效應(yīng)傳感器式替代反電動(dòng)勢的方法
霍爾效應(yīng)傳感器式替代反電動(dòng)勢的方法
無刷直流 (BLDC) 電機(jī)變得越來越流行,原因不言自明,因?yàn)槭褂脗鹘y(tǒng)電機(jī)時(shí)始終會(huì)有電刷磨損,更換為電子控制器后將會(huì)大大提升設(shè)備的的可靠性。 而且在保持同等功率輸出的情況下,BLDC 電機(jī)可以做得更小、更輕,特別適合空間受限型應(yīng)用。
由于 BLDC 電機(jī)的轉(zhuǎn)子和定子之間不存在機(jī)械和電接觸,因此需要替代方法來指示零部件的相對位置,從而實(shí)現(xiàn)電機(jī)控制。 BLDC 電機(jī)使用兩種方式之一來實(shí)現(xiàn)此目的,即采用霍爾傳感器或測量反電動(dòng)勢。
廢除傳感器
BLDC 電機(jī)去掉了組成傳統(tǒng)裝置機(jī)械換向器的磨損零件(改進(jìn)了可靠性) 此外,BLDC 電機(jī)具有高扭矩/電機(jī)尺寸比率,快速動(dòng)態(tài)響應(yīng)能力,且?guī)谉o工作噪聲。
BLDC 電機(jī)歸類為同步設(shè)備,因?yàn)檗D(zhuǎn)子和定子的磁場頻率相同。 定子由鋼片組成,軸向開槽以便沿著內(nèi)部圓柱面容納奇數(shù)個(gè)的繞組。 轉(zhuǎn)子采用永久磁體制造,具有兩到八個(gè) N-S 磁極對。
BLDC 電機(jī)的電子換向器順次激勵(lì)定子線圈,產(chǎn)生旋轉(zhuǎn)電磁場,從而“拖拽”圍繞它的轉(zhuǎn)子。 通過確保線圈在正確的時(shí)間獲得精確地激勵(lì)來實(shí)現(xiàn)有效運(yùn)轉(zhuǎn)。
傳感器很有用,但會(huì)增加成本,增加復(fù)雜性(由于需要附加繞組),并降低了可靠性(部分原因是傳感器連接更容易受到灰塵和潮濕環(huán)境的污染)。 無傳感器控制方式解決了這些不足。
利用反電動(dòng)勢
電機(jī)的繞組切過磁力線時(shí)就象一個(gè)發(fā)電機(jī)。 此時(shí)會(huì)在繞組中產(chǎn)生電勢,以電壓表示,稱作電動(dòng)勢 (EMF)。 按照倫茨定律,這一電動(dòng)勢會(huì)產(chǎn)生二次磁場,對抗驅(qū)動(dòng)電機(jī)旋轉(zhuǎn)的磁通量的原始變化。 簡而言之 ,這種電動(dòng)勢會(huì)阻礙電機(jī)自然運(yùn)動(dòng),因而稱之為“反”電動(dòng)勢。 在既定電機(jī)磁通量和繞組數(shù)固定的情況下,電動(dòng)勢的幅度與電機(jī)的角速度成正比。
BLDC 電機(jī)制造商指定了一個(gè)稱“作反電動(dòng)勢常數(shù)”的參數(shù),用來估計(jì)既定速度的反電動(dòng)勢。 通過從供應(yīng)電壓中減去反電動(dòng)勢即可計(jì)算出繞組上的電勢。 電機(jī)是這樣設(shè)計(jì)的,當(dāng)它們以額定速度運(yùn)轉(zhuǎn)時(shí),反電動(dòng)勢和供應(yīng)電壓間的電勢差將會(huì)引起電機(jī)消耗額定電流并輸出額定扭矩。
驅(qū)動(dòng)電機(jī)超出額定速度時(shí)會(huì)大幅增加反電動(dòng)勢,從而降低了繞組的電勢差,反過來減少了電流并降低了扭矩。 更快地推動(dòng)電機(jī)仍會(huì)引起反電動(dòng)勢(加上電機(jī)損耗)完全等于供應(yīng)電壓——此時(shí),電流和扭矩都將為零。
因?yàn)榉措妱?dòng)勢會(huì)降低電機(jī)扭矩,這有時(shí)是一種劣勢,但對于 BLDC 電機(jī),工程師卻可以將這種現(xiàn)象轉(zhuǎn)變?yōu)閮?yōu)勢。
三相 BLDC 電機(jī)變換序列的各個(gè)階段是通過正向激勵(lì)一個(gè)繞組、反向激勵(lì)第二個(gè)繞組,然后讓第三個(gè)繞組開路來實(shí)現(xiàn)的。 圖 1 顯示了此類電機(jī)的第一個(gè)六階段換向序列的簡化示意圖。
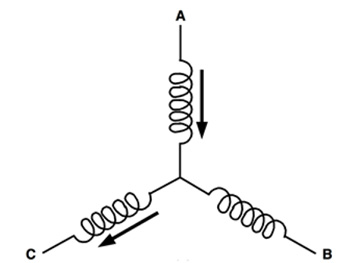
圖 1: 針對 BLDC 電機(jī)的第一個(gè)六階段電循環(huán) 線圈 A 正向激勵(lì),線圈 B 為開路,C 反向激勵(lì)(Microchip 提供)。
使用霍爾傳感器的 BLDC 電機(jī)使用受 MCU 控制并通過驅(qū)動(dòng)器操作的設(shè)備產(chǎn)生的輸出,來切換絕緣柵雙極晶體管 (IGBT) 或金屬氧化物半導(dǎo)體場效應(yīng)晶體管 (MOSFET) 以正常順序激勵(lì)線圈。 當(dāng)霍爾傳感器輸出變化狀態(tài)時(shí),這些晶體管就會(huì)觸發(fā)(同時(shí)線圈會(huì)被激勵(lì))。1
BLDC 電機(jī)的無傳感器變型電機(jī),則無霍爾效應(yīng)傳感器。 相反,當(dāng)電機(jī)旋轉(zhuǎn)時(shí),三個(gè)線圈中的反向電動(dòng)勢會(huì)以梯形(長虛線)方式變化,如圖 2 所示。 為便于比較,同一圖中也顯示了類似配置電機(jī)的霍爾傳感器的輸出。
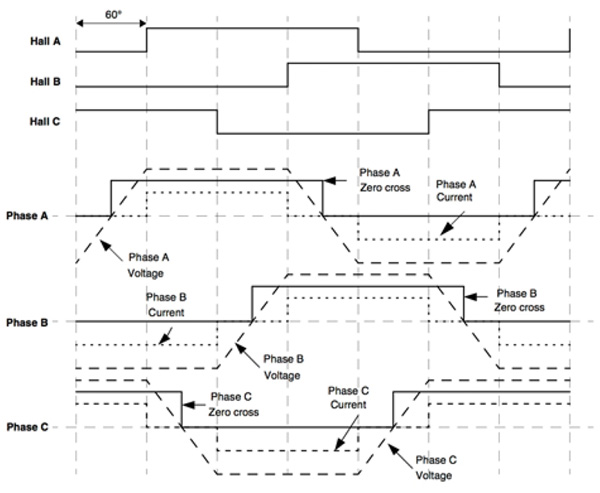
圖 2: 三相 BLDC 電機(jī)的霍爾傳感器輸出與反電動(dòng)勢之比較 注意,霍爾傳感器的切換方式與跨過無傳感器電機(jī)中零點(diǎn)時(shí)相應(yīng)線圈的反電動(dòng)勢是一致的(Microchip 提供)。
所有三個(gè)零交叉點(diǎn)的組合用來決定線圈的激勵(lì)序列。 注意,傳統(tǒng) BLDC 電機(jī)中單個(gè)霍爾傳感器變化輸出,與無傳感器電機(jī)中單個(gè)線圈的反電動(dòng)勢零交叉點(diǎn)之間有一個(gè) 30 度的相位差。 因此,在檢測到零交叉點(diǎn)之后,我們會(huì)在無傳感器電機(jī)電路的固件中內(nèi)置一個(gè) 30 度相位延遲,然后再激活激勵(lì)序列中的下一個(gè)動(dòng)作。 圖 2 中,短虛線表示線圈中的電流。
圖 3 顯示了無傳感器三相 BLDC 電機(jī)的一個(gè)控制電路。 在這種情況下,該電路使用了 Microchip PIC18FXX31 8 位 MCU 來產(chǎn)生脈沖寬度調(diào)制 (PWM) 輸出,以觸發(fā)三相逆變器橋中的 IGBT 或 MOSFET。 該 MCU 對來自反電動(dòng)勢零交檢測電路的輸入作出反應(yīng)。
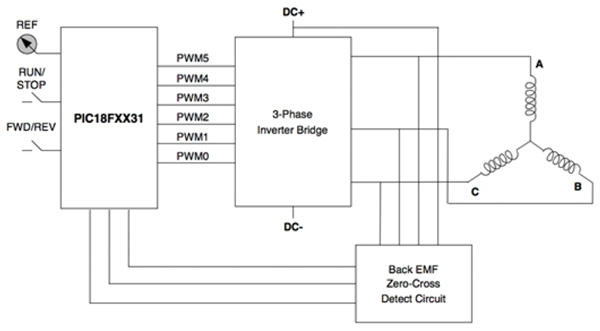
圖 3:無傳感器三相 BLDC 電機(jī)的控制電路(Microchip 提供)。
檢測反電動(dòng)勢的方法
有多種技術(shù)來測量反電動(dòng)勢。 最簡單的方法就是用比較器將反電動(dòng)勢與一半的直流總線電壓比較。 圖 4a 顯示了這樣一個(gè)系統(tǒng)的示意圖。 在圖示情況下,比較器連接到線圈 B,完整的系統(tǒng)每個(gè)線圈都應(yīng)該連接有一個(gè)比較器。 在此圖中,線圈 A 正向激勵(lì),線圈 C 反向激勵(lì),而線圈 B 則開路。 當(dāng)實(shí)現(xiàn)此相位的激勵(lì)序列時(shí),反電動(dòng)勢就會(huì)上升和下降。
這一簡單比較器方法主要缺點(diǎn)就是三個(gè)繞組可能沒有相同的特征,造成實(shí)際零交叉點(diǎn)的正負(fù)相移。 電機(jī)仍可能在運(yùn)轉(zhuǎn),但可能消耗過多電流。
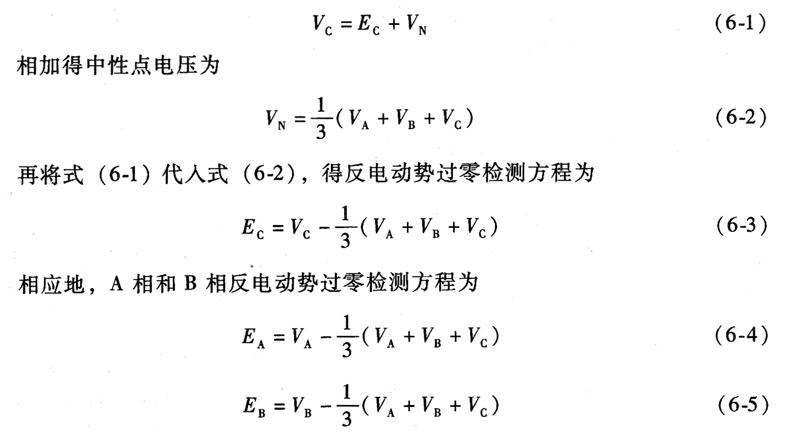
解決方法就是通過使用與電機(jī)繞組并接的三個(gè)電阻網(wǎng)絡(luò)來產(chǎn)生一個(gè)虛擬中性點(diǎn)(如圖 4b 所示)。 反電動(dòng)勢然后就會(huì)與虛擬中性點(diǎn)進(jìn)行比較。
第三種方法是采用模數(shù)轉(zhuǎn)換器 (ADC)(如圖 4c)。 為 BLDC 電機(jī)控制提供的許多 MCU 包括適合作此用途的高速 ADC。 采用這種方法后,反電動(dòng)勢就會(huì)衰減,以便可以直接饋送給 MCU。 信號(hào)被 ADC 采樣后就會(huì)同與零點(diǎn)對應(yīng)的數(shù)字值比較。 當(dāng)這兩個(gè)值匹配時(shí),線圈激勵(lì)序列就會(huì)變址到下一步。 這種技術(shù)具有一定優(yōu)勢,如允許使用數(shù)字濾波器來清除反電動(dòng)勢信號(hào)中的高頻切換成份。2
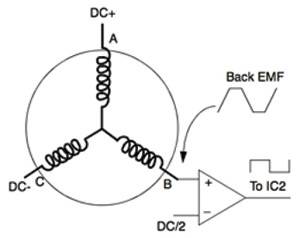
圖 4a:測量反電動(dòng)勢的簡單比較器電路(Microchip 提供)。
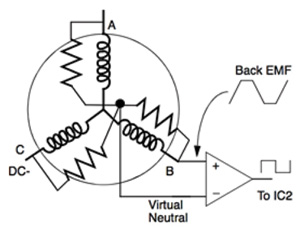
圖 4b:通過實(shí)施虛擬中性點(diǎn)可以改進(jìn)簡單比較器電路(Microchip 提供)。
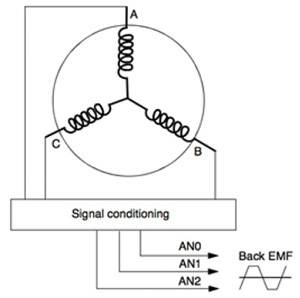
圖 4c:信號(hào)被 ADC 采樣后就會(huì)同與零點(diǎn)對應(yīng)的數(shù)字值比較(Microchip 提供)。
無傳感器 BLDC 電機(jī)控制有一大不足,就是當(dāng)電機(jī)靜止時(shí),不會(huì)產(chǎn)生反電動(dòng)勢,這樣 MCU 就無法知道定子和轉(zhuǎn)子位置信息。
解決方法就是通過以預(yù)定序列激勵(lì)線圈來啟動(dòng)處于開環(huán)配置的電機(jī)。 當(dāng)電機(jī)看似運(yùn)轉(zhuǎn)效率不高時(shí),就會(huì)開始循環(huán)該序列。 最終,速度將足以產(chǎn)生足夠的反電動(dòng)勢,供控制系統(tǒng)切換到正常閉環(huán)運(yùn)行狀態(tài)(有效狀態(tài))。
由于反電機(jī)勢與旋轉(zhuǎn)速度成正比,因此在需要較低速度的應(yīng)用中,無傳感器 BLDC 電機(jī)可能不是一個(gè)好的選擇。 此時(shí)帶有霍爾效應(yīng)傳感器的 BLDC 電機(jī)可能是更好的選擇。
無傳感器 BLDC 電機(jī)控制系統(tǒng)
無傳感器 BLDC 電機(jī)的不斷流行,促使半導(dǎo)體廠商們開發(fā)專門針對此類裝置控制和驅(qū)動(dòng)的專用芯片。 典型的電機(jī)控制系統(tǒng)由一個(gè) MCU 加上一個(gè) IGBT(或 MOSFET)驅(qū)動(dòng)器組成。
有許多 MCU 可供無傳感器 BLDC 電機(jī)使用,范圍覆蓋低成本的 8 位器件到較高性能的 16 位和 32 位器件,全部只需要最少的外設(shè)器件就可以驅(qū)動(dòng)電機(jī)。 這些外設(shè)包括三相 PWM、ADC 和用于過流保護(hù)的比較器。3
Zilog 提供 Z16FMC 系列 16 位 MCU 用于無傳感器 BLDC 電機(jī)控制。 據(jù)該公司所稱,任務(wù)要求 MCU 具有快速響應(yīng)能力來實(shí)時(shí)處理 PWM 更新。 Z16FMC 能夠在 ADC 和定時(shí)器之間以及比較器與 PWM 輸出之間提供自動(dòng)互操作。 圖 5 顯示了 Zilog 電機(jī)控制 MCU 的框圖。
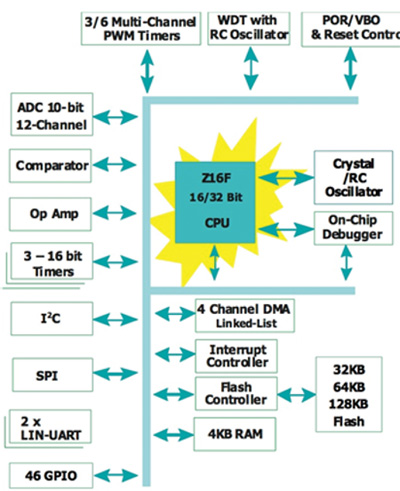
圖 5:Zilog Z16FMC 電機(jī)控制 MCU 框圖。
Microchip PIC18F2431 也是用于無傳感器 BLDC 電機(jī)控制的常用 MCU。 該芯片使用 8 位處理器并可工作在多達(dá) 16 MIPS 的指令速度下。 PIC18F 系列的變型器件將三相電機(jī)控制 PWM 外設(shè)與多達(dá)八個(gè)輸出和 10 或 12 位 ADC 綜合在一起。
Texas Instruments (TI) 為其零件提供了一個(gè)用于三相 BLDC 裝置的電機(jī)控制評估套件。。 按照該公司所述,DRV8312-C2-KIT(圖 6)– 基于 DRV8312 PWM 電機(jī)驅(qū)動(dòng)器– 就是一種無傳感器磁場定向控制 (FOC) 和傳感器/無傳感器梯形變換平臺(tái),從而加速開發(fā),實(shí)現(xiàn)產(chǎn)品快速上市。 應(yīng)用包括次 50 V 和 7 A 無刷電機(jī),用于驅(qū)動(dòng)醫(yī)用泵、門、電梯和小型泵以及工業(yè)和消費(fèi)機(jī)器人與自動(dòng)化設(shè)備。
圖 6:TI 的三相 BLDC 電機(jī)評估套件基于 DRV8312 PWM 電機(jī)驅(qū)動(dòng)器。
應(yīng)用廣泛
無傳感器 BLDC 電機(jī)更簡單,相比使用霍爾效應(yīng)傳感器的電機(jī)潛在可靠性更高,當(dāng)應(yīng)用用于骯臟、潮濕的環(huán)境時(shí),尤為如此。 這些電機(jī)依賴反電機(jī)勢測量結(jié)果來確定定子和轉(zhuǎn)子的相對位置,以便實(shí)現(xiàn)正確的線圈激勵(lì)序列。
一個(gè)不足之處就是,當(dāng)電機(jī)靜止時(shí),沒有產(chǎn)生反向電動(dòng)勢,因此啟動(dòng)時(shí)是受開環(huán)操作影響的。 因此,電機(jī)需要花上較短的時(shí)間來解決問題然后才能有效運(yùn)轉(zhuǎn)。 第二個(gè)不足是,在速度較低時(shí),此時(shí)反電機(jī)勢很小而難以測量,會(huì)造成工作效率不高。 在此類應(yīng)用中應(yīng)考慮使用配備傳感器的 BLDC 電機(jī)。
但對于眾多的其它應(yīng)用來說,工程師仍可以利用小巧而強(qiáng)大的無傳感器 BLDC 電機(jī)。 使用專用為此類任務(wù)設(shè)計(jì)的 MCU 和 IGBT(或 MOSFET)驅(qū)動(dòng)器芯片可簡化設(shè)計(jì)過程。 各大廠商通過評估套件提供針對成熟無傳感器 BLDC 電機(jī)解決方案的參考電路,利用這些評估套件可以進(jìn)一步改進(jìn)開發(fā)過程。
-
傳感器
+關(guān)注
關(guān)注
2564文章
52722瀏覽量
764702 -
驅(qū)動(dòng)器
+關(guān)注
關(guān)注
54文章
8646瀏覽量
149327 -
電機(jī)
+關(guān)注
關(guān)注
143文章
9265瀏覽量
148645
發(fā)布評論請先 登錄
怎么看電機(jī)的反電動(dòng)勢波形?
STM32 BLDC反電動(dòng)勢控制
buck電路的反電動(dòng)勢問題
無刷直流電機(jī)中反電動(dòng)勢的定義
傳統(tǒng)反電動(dòng)勢檢測與換相控制檢測電路優(yōu)劣點(diǎn)比較分析
電路賞析有獎(jiǎng)活動(dòng)第四期——霍爾信號(hào)與反電動(dòng)勢波形關(guān)系推導(dǎo)繞組通電順序討論
【原創(chuàng)分享】實(shí)際測量三相直流無刷電機(jī)反電動(dòng)勢波形
沒有隔離探頭如何確定霍爾信號(hào)與反電動(dòng)勢的關(guān)系?
無刷直流電機(jī)無感控制仿真的反電動(dòng)勢法介紹
反電動(dòng)勢的理解_反電動(dòng)勢計(jì)算公式_利用反電動(dòng)勢機(jī)怎樣克服反電動(dòng)勢
反電動(dòng)勢的理解_反電動(dòng)勢計(jì)算公式
什么叫反電動(dòng)勢?電機(jī)中的反電動(dòng)勢?
反電動(dòng)勢怎么產(chǎn)生的_反電動(dòng)勢的檢測方法





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論