") 自動(dòng)駕駛的級(jí)別
自動(dòng)駕駛的級(jí)別
自動(dòng)駕駛的級(jí)別
為了更方便的區(qū)分和定義自動(dòng)駕駛技術(shù),早期就曾經(jīng)有人提出了對(duì)自動(dòng)駕駛進(jìn)行分級(jí)。目前全球汽車(chē)行業(yè)公認(rèn)的兩個(gè)分級(jí)制度分別是由美國(guó)高速公路安全管理局(簡(jiǎn)稱(chēng)NHTSA)和國(guó)際自動(dòng)機(jī)工程師學(xué)會(huì)(簡(jiǎn)稱(chēng)SAE)提出的。而此次,我們則以更為直觀的SAE定義的自動(dòng)駕駛技術(shù)分級(jí)為例:
按照分級(jí)標(biāo)準(zhǔn),自動(dòng)駕駛從L0-L5總共被分為6個(gè)級(jí)別,現(xiàn)在我們一起來(lái)看看不同級(jí)別的自動(dòng)駕駛技術(shù)分別承擔(dān)怎樣的工作職責(zé)。
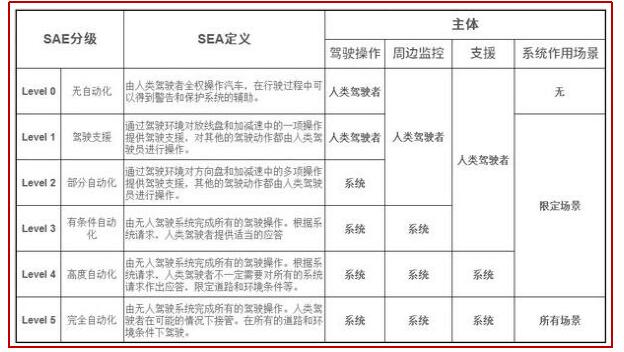
1、L1級(jí)別
相比完全依靠駕駛員自行操作車(chē)輛的L0級(jí)別,L1級(jí)的自動(dòng)駕駛能給駕駛員一些駕駛支援。比如早期從沃爾沃卡車(chē)、奔馳一類(lèi)的進(jìn)口車(chē)所裝配的自適應(yīng)巡航(ACC)功能,即能夠通過(guò)雷達(dá)探測(cè)與前車(chē)的實(shí)時(shí)距離自動(dòng)控制加減速,從而保持與前車(chē)的安全距離。現(xiàn)階段,該技術(shù)已經(jīng)普及,在國(guó)內(nèi)的很多商用車(chē)上都有應(yīng)用。
2、L2級(jí)別,部分自動(dòng)化的自動(dòng)駕駛:
此階段的自動(dòng)駕駛是指自動(dòng)系統(tǒng)能夠完成某些駕駛?cè)蝿?wù),但駕駛員需要仍要雙手雙腳隨時(shí)待命,以便在特殊情況下,及時(shí)接管系統(tǒng)。L2級(jí)別的自動(dòng)駕駛?cè)孕柙谙薅ǖ膱?chǎng)景下運(yùn)行。
3、L3級(jí)別,有限制條件的自動(dòng)化駕駛:
在L3級(jí)別的自動(dòng)駕駛中,車(chē)輛能夠在某個(gè)特定的駕駛交通環(huán)境下可獨(dú)立完成所有的駕駛操作,而且系統(tǒng)可以自動(dòng)檢測(cè)環(huán)境的變化以判斷是否返回駕駛員手動(dòng)操作模式。在人工智能不能準(zhǔn)確判斷時(shí),仍需人工操作。L3級(jí)別的自動(dòng)駕駛?cè)孕柙谙薅ǖ膱?chǎng)景下運(yùn)行。
4、L4級(jí)別,高度自動(dòng)化:
在L4級(jí)別,自動(dòng)駕駛功能已經(jīng)可以完全接管所有的駕駛操作,駕駛員可不必將注意力放在駕駛操作方面,甚至可以做其他與駕駛無(wú)關(guān)的行為,例如看手機(jī)或者是休息。但是,需要說(shuō)明的是,L4級(jí)別雖然已經(jīng)達(dá)到高度自動(dòng)化的標(biāo)準(zhǔn),但是還是受到場(chǎng)景的限制,不能完全適應(yīng)所有場(chǎng)景。
5、L5級(jí)別,完全自動(dòng)化:
所謂的自動(dòng)駕駛L5級(jí)別在定義上與L4級(jí)別相似,由智能系統(tǒng)獨(dú)立的完成所有的駕駛操作。但二者的區(qū)別在于,L4級(jí)別的自動(dòng)駕駛僅適用于部分場(chǎng)景下,通常是路況非常簡(jiǎn)單且標(biāo)準(zhǔn)化的道路之上。而L5級(jí)別則要求自動(dòng)駕駛汽車(chē)在任何場(chǎng)景下都可以做到完全駕駛車(chē)輛行駛。
-
自動(dòng)駕駛
+關(guān)注
關(guān)注
788文章
14252瀏覽量
170041
發(fā)布評(píng)論請(qǐng)先 登錄
自動(dòng)駕駛安全基石:ODD

劉強(qiáng)東,進(jìn)軍汽車(chē)領(lǐng)域# 京東# 自動(dòng)駕駛# 自動(dòng)駕駛出租車(chē)# 京東自動(dòng)駕駛快遞車(chē)
如何實(shí)現(xiàn)自動(dòng)駕駛規(guī)控算法的仿真驗(yàn)證

一文聊聊自動(dòng)駕駛測(cè)試技術(shù)的挑戰(zhàn)與創(chuàng)新

自動(dòng)駕駛汽車(chē)安全嗎?


自動(dòng)駕駛HiL測(cè)試方案案例分析--ADS HiL測(cè)試系統(tǒng)#ADAS #自動(dòng)駕駛 #VTHiL
l4級(jí)別自動(dòng)駕駛的特點(diǎn)是什么
自動(dòng)駕駛技術(shù)的典型應(yīng)用 自動(dòng)駕駛技術(shù)涉及到哪些技術(shù)

自動(dòng)駕駛HiL測(cè)試方案——攝像頭仿真之視頻注入#ADAS #自動(dòng)駕駛 #VTHiL
高級(jí)別自動(dòng)駕駛產(chǎn)業(yè)的商業(yè)藍(lán)圖正迅速擴(kuò)展其邊界

自動(dòng)駕駛HiL測(cè)試方案 ——場(chǎng)景仿真3D演示#ADAS #自動(dòng)駕駛 #VTHiL






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論