 四軸飛行器的結構與基本飛行原理
四軸飛行器的結構與基本飛行原理
四軸飛行器是微型飛行器的其中一種,相對于固定翼飛行器,它的方向控制靈活、抗干擾能力強、飛行穩定,能夠攜帶一定的負載和有懸停功能,因此能夠很好地進行空中拍攝、監視、偵查等功能,在軍事和民用上具備廣泛的運用前景。 四軸飛行器關鍵技術在于控制策略。
由于智能控制算法在運行復雜的浮點型運算以及矩陣運算時,微處理器計算能力受限,難以達到飛行控制實時性的要求;而PID控制簡單,易于實現,且技術成熟,因此目前主流的控制策略主要是圍繞傳統的PID控制展開。
01
四軸飛行器的結構與基本飛行原理
四軸飛行器結構:主要由主控板和呈十字交叉結構的4個電子調速器、電機、旋漿組成,電機由電子調速器控制,主控板主要負責解算當前飛行姿態、控制電調等功能。 以十字飛行模式為例,l號旋翼為頭,1、3號旋翼逆時針旋轉,2、4號旋翼順時針旋轉,如圖1所示。
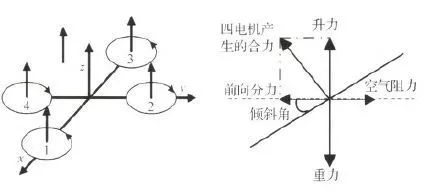
圖1 四軸飛行器結構圖
參照飛行狀態表1變化電機轉速,由于四個電機轉速不同,使其與水平面傾斜一定角度,如圖l所示。四個電機產生的合力分解為向上的升力與前向分力。當重力與升力相等時,前向分力驅動四軸飛行器向傾斜角度的方向水平飛行。
1/空間三軸角度歐拉角分為仰俯角、橫滾角、航向角;
2/傾斜角是仰俯角時,向前、向后飛行;
3/傾斜角是橫滾角時,向左、向右飛行;
而傾斜航向角時,向左、右旋轉運動,左(右)旋轉是由于順時針兩電機產生的反扭矩之和與逆時針兩電機產生的反扭矩之和不等,即不能相互抵消,機身便在反扭矩作用下繞z軸自旋轉。
02
姿態解算
四軸飛行器運用姿態解算計算出空間三軸歐拉角。結構框架如圖2所示,陀螺儀采樣三軸角速度值,加速度傳感器采樣三軸加速度值,而磁力傳感器采樣得到三軸地磁場值,將陀螺儀、加速度傳感器、磁力傳感器采樣后的數據進行標定、濾波、校正后得到三軸歐拉角度,其中陀螺儀和加速度傳感器選用MPU6050芯片,磁力傳感器選用HMC5883L芯片,采用IIC總線與主控板通信。
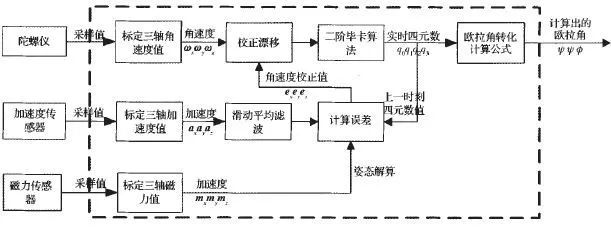
圖2 姿態解算結構圖
由于傳感器存在器件誤差,因此在使用前需要標定。陀螺儀在靜止時,角速度為0;但實際情況由于器件誤差并不為0,因此可在靜止時采樣500次數據,再求平均,得出偏移量,標定陀螺儀數據;加速度傳感器可依據在靜止時,三軸重力加速度平方和的開方為重力加速度的標定方程,利用最小二乘法求出標定偏移值和誤差值進行標定。而磁力傳感器校正,可將器件靜置于桌面旋轉一周找出最小值和最大值,通過電子羅盤校正計算公式計算出標定偏移值和誤差值。 由于陀螺儀長時間采集角速度會有飄移,因此需要使用加速度傳感器的值與磁力傳感器的值進行校正。
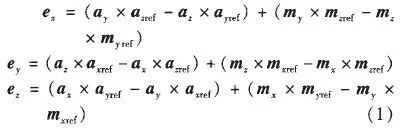
將加速度的測量矢量和磁場的測量矢量與參考矢量做叉積后相加式(1)中:ex、ey、ez為兩叉積之和,ax、ay、az為加速度的測量矢量,mx、my、mz為磁場的測量矢量,axref、ayref、azref為加速度的參考矢量,mxref、myref、mzref為磁場的參考矢量,參考矢量是通過實時四元數值與本次測量值計算出來。 再將叉積修正角速度漂移值:
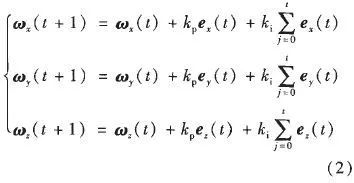
式(2)中ωx(t)、ωy(t)、ωz(t)為角速度,kpex(t)為比例項修正。

為積分修正項將校正后的角速度通過二階畢卡算法轉化為四元公式,如(3)

03
高度計算
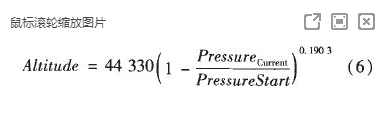
高度計算是通過氣壓傳感器采集的大氣壓值計算出來,將氣壓傳感器采集值進行校正后,在通過溫度二階補償,得到準確的大氣壓值,最后經過氣壓轉換為高度公式(6)中Altitude為計算出來的實際高度CurrentPressure為當前氣壓值,StartPressure為起飛之前氣壓值。氣壓傳感器選用MS5611芯片,其中集成了溫度傳感器和氣壓傳感器,采用IIC總線與主控板通信。
01
PID控制 :雙閉環PID控制
當四軸飛行器正常飛行時,突遇外力(風等)或磁場干擾,使加速度傳感器或磁力傳感器采集數據失真,造成姿態解算出來的歐拉角錯誤,只用角度單環情況下,使系統很難穩定運行,因此可以加入角速度作為內環,角速度由陀螺儀采集數據輸出,采集值一般不存在受外界影響情況,抗干擾能力強,并且角速度變化靈敏,當受外界干擾時;同理,高度環中氣壓傳感器同樣也會受到外界干擾,引入z軸加速度環可有效避免外界干擾造成的影響,增強了系統的魯棒性。四軸飛行器雙閉環PID控制,如圖3、圖4所示。角度作為外環,角速度作為內環,進行姿態PID控制;當需要定高時,高度作為外環,z軸加速度作為內環,進行高度PID控制。其中,PID輸出為油門值,油門給定電子調速器值,電子調速器控制電機使空間三軸歐拉角和高度變化。

圖3姿態PID控制總體流程圖
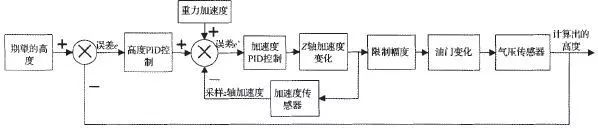
圖4高度PID控制總體流程圖
PID控制算法采用位置式數字PID控制:

(7)中u(t)為PID輸出值,e(t)為期望值與實際值之差,
為積分量,

為微分量,kp,、ki、kd。為比例、積分、微分系數。 在將積分量,微分量離散化得到PID計算公式
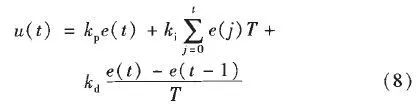
式(8)中T為更新時間。 基于公式(8),姿態PID控制算法
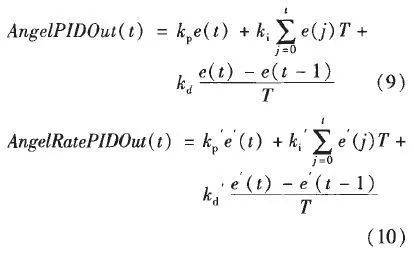
式(9)為角度環PID計算公式,(10)為角速度環PID計算公式。AngelPIDOut(t)為角度環PID輸出,AngelRatePIDOut(t)為角速度環PID輸出,e(t)=期望角度一實際角度,e'(t)=AngelPIDOut(t) - 實際角速度。 同理高度PID控制算法:
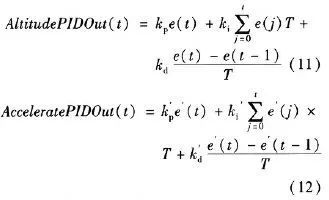
式(11)為高度環PID計算公式,公式(12)為加速度環PID計算公式,AltitudePIDOut(t)為高度環PID輸出,AcceleratePIDOut(t)為加速度環PID輸出。e(t)=期望高度一實際高度,e'(t)=AltitudePIDOut(t) - (z軸加速度 - 重力加速度值)。
-
傳感器
+關注
關注
2561文章
52199瀏覽量
761830 -
PID控制
+關注
關注
10文章
461瀏覽量
40882 -
飛行器
+關注
關注
13文章
733瀏覽量
46084
原文標題:學院推薦 | 四軸無人機的結構與基本飛行原理和雙閉環PID控制解讀
文章出處:【微信號:elecfans,微信公眾號:電子發燒友網】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論