 C-V2X智能駕駛車路協同之道
C-V2X智能駕駛車路協同之道

汽車技術發展至今,想要把車開得更安全、更快,我們要依靠更強的信息收集和處理能力——而把駕駛者從人類替換為計算機,進行自動駕駛,是突破人類生物體機能限制的唯一辦法。
于是我們給汽車裝上眼睛:比如攝像頭、激光雷達;裝上耳朵:比如毫米波雷達。裝上腦子:本地的CPU與存儲——這些“單車智能軟硬件”是對人類駕駛者的模仿和“性能提升”。
但自動駕駛還有一個人類駕駛者無法實現的能力:廣域互聯的信息共享和操作協同。這依賴V2X系統來實現。所謂V2X,就是使得車體能夠與其他車體及智能設備相互傳輸信息流的技術。依賴智能終端中的通訊模塊,車輛與車輛之間,車輛與路邊基礎交通設施(如路燈、監控攝像頭等)之間,車輛與人(隨身智能終端)等可以實現信息交互共享,別的終端“看到”的你也能“看到”,別的終端的決策也影響你的決策,最終實現“千手千眼,渾然一體”的全方位觀察和一體化調度控制。
目前V2X主要有兩種技術,一種是DSRC,在PHY和MAC等技術底層,DSRC主要使用IEEE802.11p標準,上層則采用IEEE1609系列標準。可以實現數十米距離內對高速移動的目標進行識別和雙向通信。被廣泛用于出入控制、車隊管理、信息服務等領域。
DSRC根據(當時的)歐美汽車工業現狀提出,歷經十余年發展,已經較為成熟、穩定和完善。但數十米的通訊距離對于自動駕駛乃至智慧交通系統來說,實在過短。(作為對比:在晴好天氣時,人類的視距超過500米。)
另一種技術是基于3GPP標準的C-V2X技術,同時具有4G版本和5G版本。基于LTE的版本又分為集中式和分布式。集中式需要由基站提供支持,提供車與路測單元及無線網絡間的通信;分布式則定義了車與車之間的通信。
2018年2月起,華為聯合沃達豐、博世在德國巴伐利亞州A9高速公路上實驗C-V2X技術應用。
2018年9月,浙江省宣布建設世界上首條“智慧高速”。將分三步實現智慧交通系統的建設。第一階段:實現識別車牌、高效查處高速超速、實時反映路況,測算擁堵路段、大貨車糾錯、“自由流繳費”等功能。第二階段:以AliOS、阿里云、達摩院、高德、支付寶、千尋、斑馬等企業為抓手,實現車路協同,做到道路信息實時向車輛反饋。第三階段則是在智慧道路基礎設施完備的前提下,實現自動駕駛。
2019年1月的CES2019上,福特宣布了C-V2X的明確時間表。
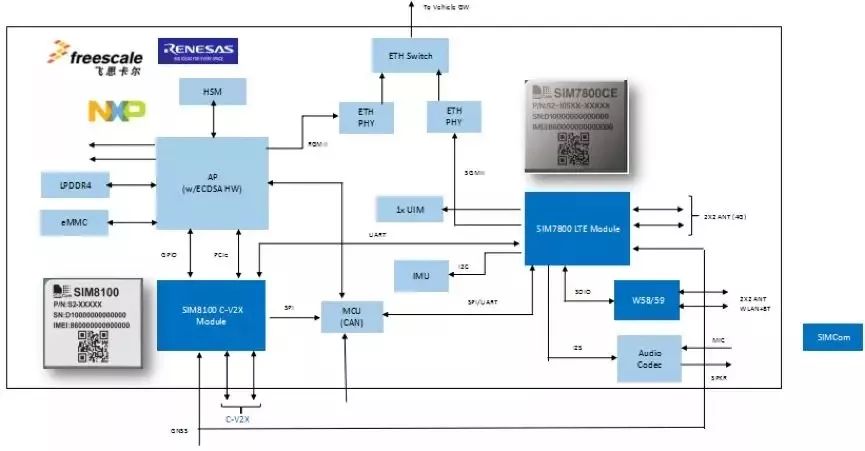
2019年2月的MWC巴塞羅那大會上,芯訊通展示了其為汽車廠賦能通訊能力的C-V2X方案。利用SIM8100模組進行PC5接口的車輛間通訊,同時利用SIM7800模組進行UU口的通訊。
相比DSRC技術,C-V2X解決了離路覆蓋、盈利模式、容量及安全方面的問題,它的頻譜帶寬分配靈活,并具有高可靠、覆蓋廣、支持大帶寬、低時延等特點。可以直接利用蜂窩網絡,組網成本明顯降低。這些優勢將鼓勵C-V2X被應用于更高要求的自動駕駛等智慧交通系統應用之中。
同時,隨著5G網絡的建設和終端的出現,1ms的超短時延和海量物聯網終端接入成為可能。車路協同乃至自動駕駛的實現,日益可期。
-
智能終端
+關注
關注
6文章
941瀏覽量
35405 -
自動駕駛
+關注
關注
790文章
14321瀏覽量
170682 -
智慧交通
+關注
關注
5文章
765瀏覽量
27430
原文標題:【世說市場】C-V2X | 智能駕駛車路協同之道
文章出處:【微信號:Excelpoint_CN,微信公眾號:Excelpoint_CN】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
5.9 GHz C-V2X 和 802.11p DSRC 高功率前端模塊 skyworksinc

技術預見者的實踐之路:C-V2X發展五年記
智慧路燈桿如何實現車路協同輔助自動駕駛?
如祺出行入選智能網聯車路云一體化典型案例
車路云協同如何讓Robotaxi加速實現




基于V2X和自動駕駛HIL聯調的仿真測試系統開發

是德科技出席2024 C-V2X“四跨”(上海)先導應用實踐活動
C-V2X安全證書:保障車路云系統通信安全的關鍵






 工商網監
工商網監
評論