") 增強(qiáng)自動(dòng)駕駛仿真:自動(dòng)駕駛技術(shù)在實(shí)驗(yàn)室更容易評(píng)估,提高路測(cè)的安全性
增強(qiáng)自動(dòng)駕駛仿真:自動(dòng)駕駛技術(shù)在實(shí)驗(yàn)室更容易評(píng)估,提高路測(cè)的安全性

馬里蘭大學(xué)計(jì)算機(jī)科學(xué)家Dinesh Manocha與百度研究和香港大學(xué)的一組同事合作,開發(fā)了一種如照片般真實(shí)的仿真模型,用于培訓(xùn)和驗(yàn)證自動(dòng)駕駛車輛。與當(dāng)前的游戲引擎或高保真計(jì)算機(jī)圖形和數(shù)學(xué)渲染流量模式系統(tǒng)相比,新系統(tǒng)提供了更豐富,更真實(shí)的模擬。
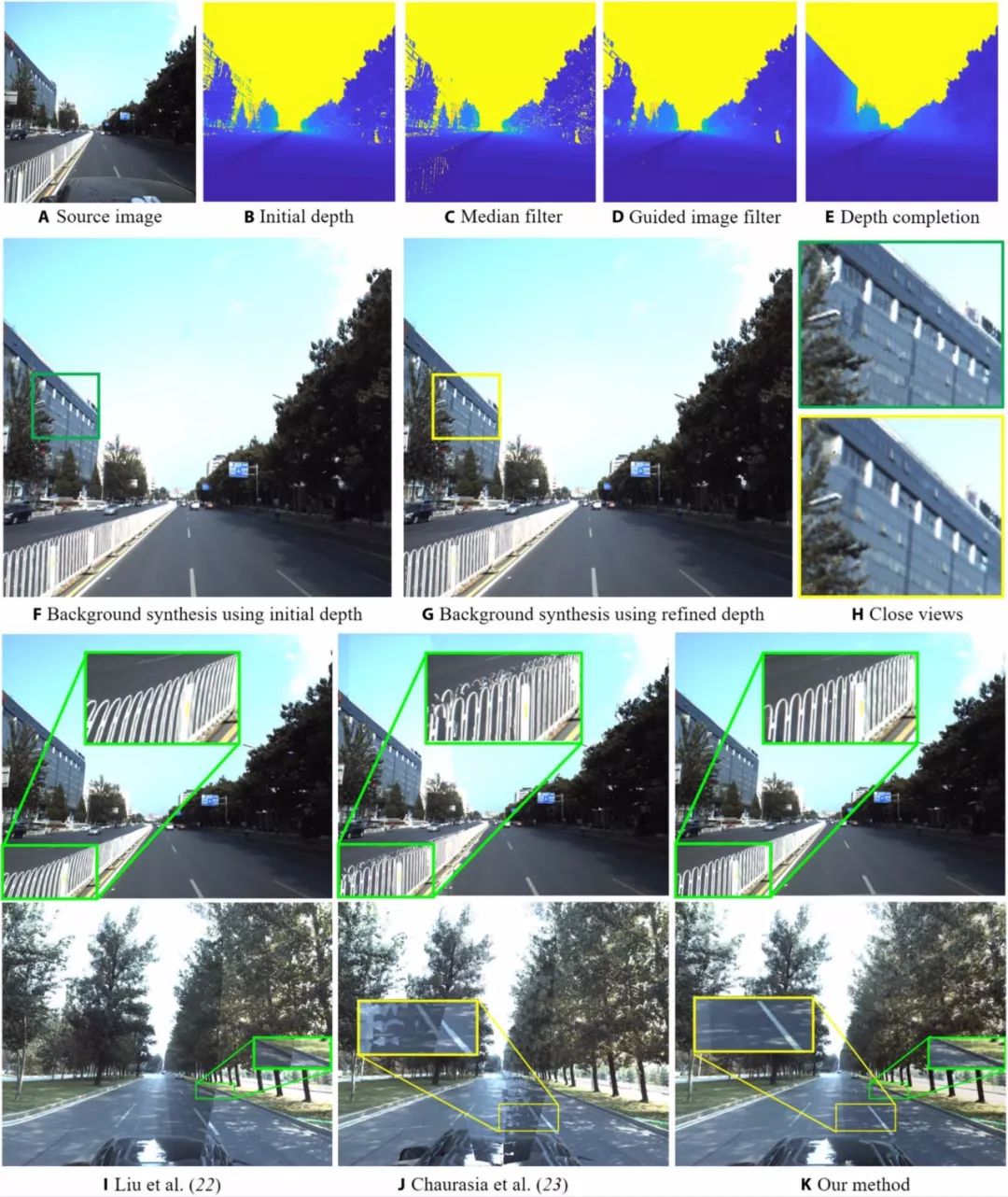
Fig. View synthesis results and effectiveness of depth refinement
他們的系統(tǒng)被稱為增強(qiáng)自動(dòng)駕駛仿真(AADS,Augmented Autonomous Driving Simulation),可以使自動(dòng)駕駛技術(shù)在實(shí)驗(yàn)室更容易評(píng)估,也可以提高路測(cè)的安全性。
科學(xué)家們?cè)?019年3月27日發(fā)表在《科學(xué)機(jī)器人》(Science Robotics)雜志上的一篇研究論文中描述了他們的研究方法。
“這項(xiàng)工作代表了一種新的仿真范例,我們可以在將它部署到真實(shí)汽車上并在高速公路或城市道路上進(jìn)行測(cè)試之前測(cè)試自動(dòng)駕駛技術(shù)的可靠性和安全性,”該論文的相應(yīng)作者之一Manocha表示(Manocha同時(shí)任職于計(jì)算機(jī)科學(xué),電氣和計(jì)算機(jī)工程以及馬里蘭大學(xué)高級(jí)計(jì)算機(jī)研究所)。
自動(dòng)駕駛汽車的一個(gè)潛在好處是,它可能比人類駕駛員更安全,因?yàn)槿祟愸{駛員容易分心、疲勞和情緒化,做出會(huì)導(dǎo)致錯(cuò)誤的決定。但是為了確保安全,自動(dòng)駕駛汽車必須對(duì)駕駛環(huán)境進(jìn)行評(píng)估和反應(yīng)。考慮到汽車在道路上可能遇到各種各樣的情況,自動(dòng)駕駛系統(tǒng)需要在極具挑戰(zhàn)的條件下進(jìn)行數(shù)億英里的試駕,以證明其可靠性。
雖然這可能需要幾十年的時(shí)間才能在道路上完成,但通過(guò)計(jì)算機(jī)仿真可以快速、高效、更安全地進(jìn)行初步評(píng)估。計(jì)算機(jī)仿真可以準(zhǔn)確地表示真實(shí)世界,并對(duì)周圍物體的行為進(jìn)行建模。目前的仿真系統(tǒng)在還原真實(shí)的光環(huán)境和呈現(xiàn)真實(shí)的交通流模式或駕駛員行為這三方面仍存在不足。
AADS是一個(gè)數(shù)據(jù)驅(qū)動(dòng)系統(tǒng),它能更準(zhǔn)確地表示自動(dòng)駕駛汽車在路上接收到的信號(hào)。自動(dòng)駕駛汽車依賴于感知模塊和導(dǎo)航模塊,感知模塊接收和解釋現(xiàn)實(shí)世界的信息,導(dǎo)航模塊根據(jù)感知模塊做出決定,比如轉(zhuǎn)向哪里、是否剎車或加速。
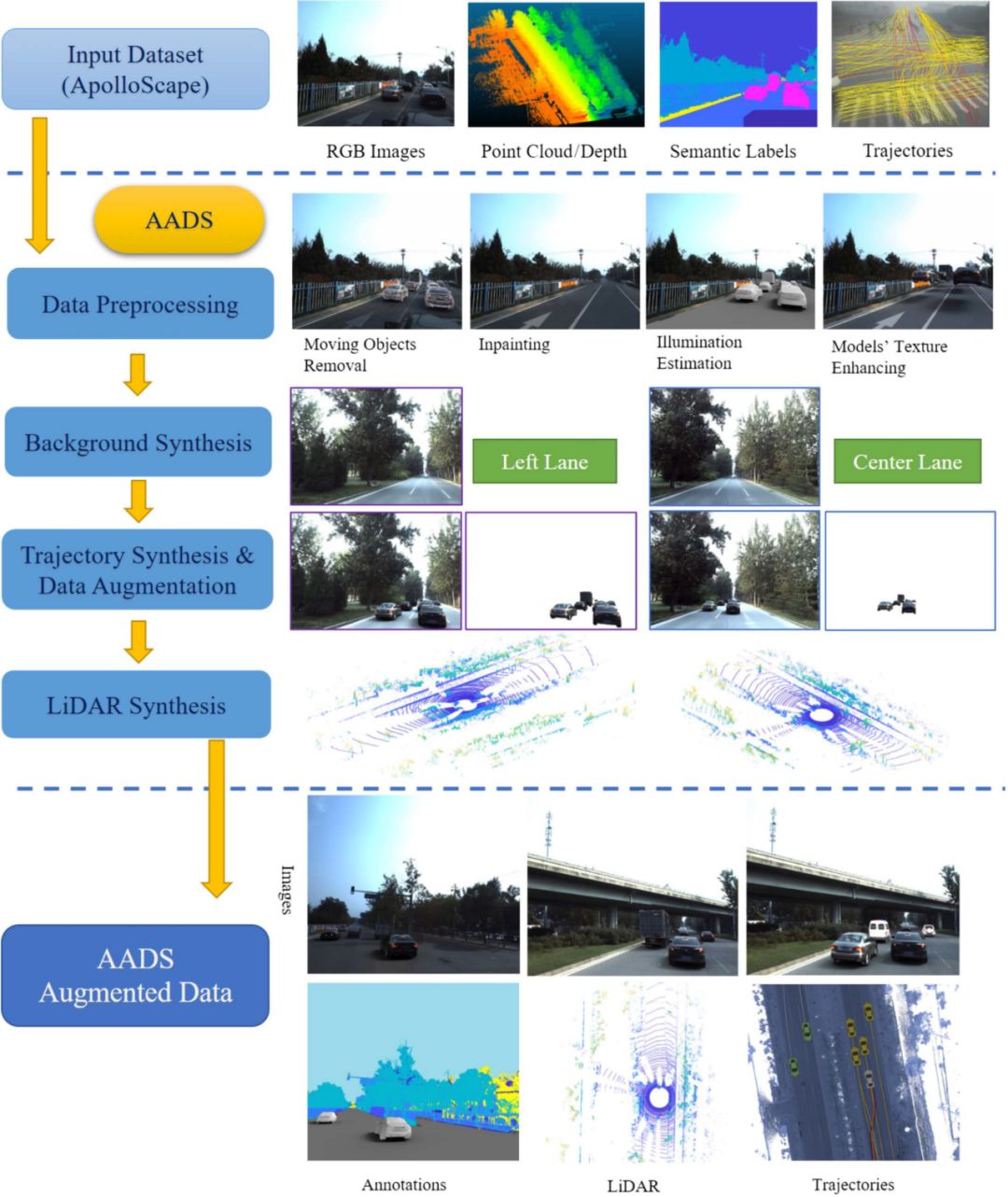
Fig. The inputs, processing pipeline, and outputs of our AADS system.
在現(xiàn)實(shí)世界中,自動(dòng)駕駛汽車的感知模塊通常接收來(lái)自攝像頭和激光雷達(dá)傳感器的信號(hào),這些傳感器使用光脈沖來(lái)測(cè)量周圍的距離。在目前的模擬器技術(shù)中,感知模塊接收來(lái)自計(jì)算機(jī)生成的圖像和行人、自行車和其他汽車的數(shù)學(xué)建模的運(yùn)動(dòng)模式的借號(hào),只是對(duì)現(xiàn)實(shí)世界的一種相對(duì)粗糙的表達(dá)。因?yàn)橛?jì)算機(jī)生成的圖像模型必須是手工生成的,所以創(chuàng)建圖像模型也是一個(gè)耗時(shí)耗財(cái)?shù)氖虑椤?/p>
AADS系統(tǒng)結(jié)合了照片、視頻和激光雷達(dá)點(diǎn)云(類似于3D形狀渲染)與行人、自行車和其他汽車的真實(shí)軌跡數(shù)據(jù)。這些數(shù)據(jù)可以用來(lái)預(yù)測(cè)其他車輛或行人在路上的駕駛行為和未來(lái)的位置,以計(jì)算出更安全的導(dǎo)航路徑。
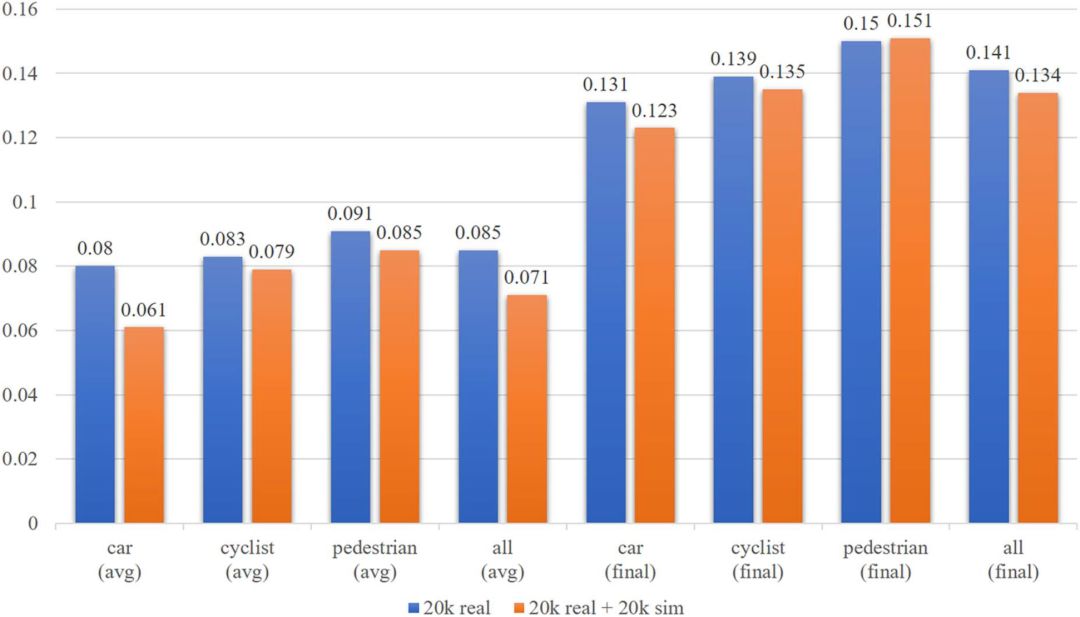
Fig. TrafficPredict evaluations
“我們用視頻和照片來(lái)模擬真實(shí)世界,”Manocha說(shuō),“但我們也在捕捉真實(shí)的行為和運(yùn)動(dòng)模式。人類開車的方式不容易被數(shù)學(xué)模型和物理定律捕捉到。所以,我們從所有可用的視頻中提取了真實(shí)軌跡的數(shù)據(jù),并使用社會(huì)科學(xué)方法對(duì)駕駛行為建模。這種數(shù)據(jù)驅(qū)動(dòng)的方法為我們提供了一個(gè)更加現(xiàn)實(shí)和有益的交通仿真模型”。
在使用真實(shí)的視頻圖像和激光雷達(dá)數(shù)據(jù)進(jìn)行建模時(shí),科學(xué)家們面臨著一個(gè)長(zhǎng)期的挑戰(zhàn):每一個(gè)場(chǎng)景都必須對(duì)自動(dòng)駕駛汽車的運(yùn)動(dòng)做出反應(yīng),即使這些運(yùn)動(dòng)可能沒(méi)有被最初的攝像頭或激光雷達(dá)傳感器捕捉到。無(wú)論照片或視頻以什么樣的角度或視角被捕捉到,都必須使用預(yù)測(cè)方法進(jìn)行渲染或模擬。這就是為什么仿真技術(shù)總是如此嚴(yán)重地依賴于計(jì)算機(jī)生成的圖形,也嚴(yán)重依賴于基于物理的預(yù)測(cè)技術(shù)。
為了克服這一挑戰(zhàn),研究人員開發(fā)了一種技術(shù),可以將真實(shí)街道場(chǎng)景的各個(gè)部分分離出來(lái),并將它們呈現(xiàn)為單獨(dú)的元素,這些元素可以被重新合成,以創(chuàng)建大量真實(shí)的照片駕駛場(chǎng)景。
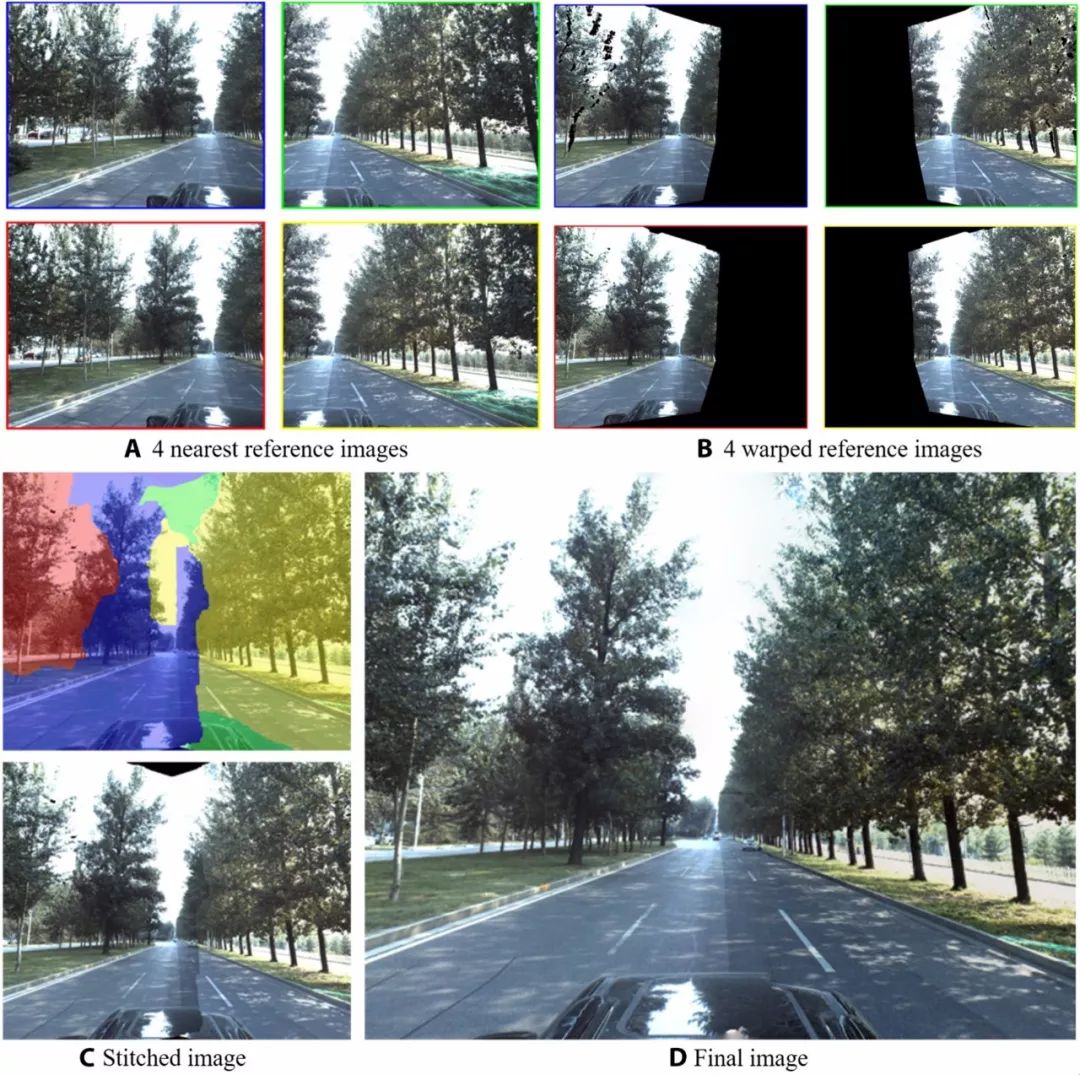
Fig. Novel view synthesis pipeline
通過(guò)AADS,車輛和行人可以從一個(gè)環(huán)境中平移到另一個(gè)環(huán)境中。可以根據(jù)不同的交通等級(jí)重建道路。每個(gè)場(chǎng)景的多個(gè)視角在車道變換和轉(zhuǎn)彎期間提供更真實(shí)的圖像。此外,與其他視頻模擬技術(shù)相比,先進(jìn)的圖像處理技術(shù)可實(shí)現(xiàn)平滑過(guò)渡并減少失真。圖像處理技術(shù)還用于提取軌跡,從而模擬駕駛員行為。
“因?yàn)槲覀兪褂玫氖钦鎸?shí)世界的視頻和真實(shí)世界的動(dòng)作,我們的感知模塊比以往的方法擁有更準(zhǔn)確的信息,”Manocha說(shuō)。“然后,由于仿真模型的真實(shí)感,我們可以更好地評(píng)估自主駕駛系統(tǒng)的導(dǎo)航策略”。
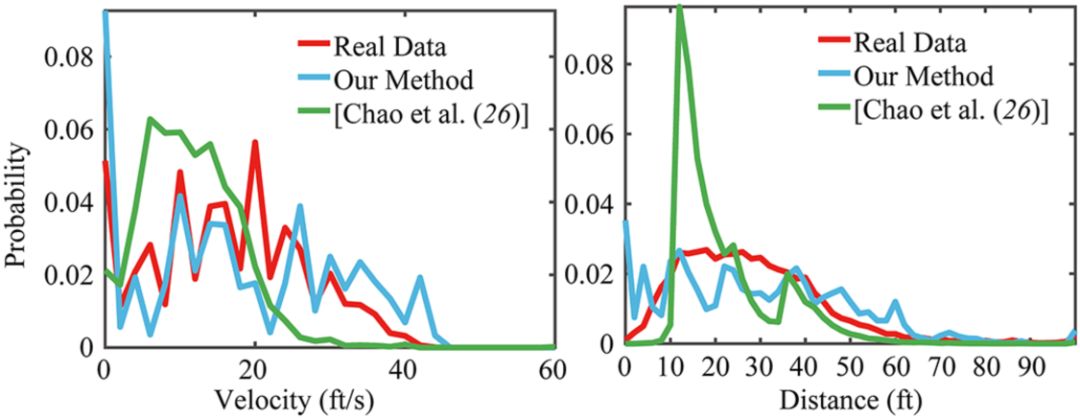
Fig. Comparison of traffic synthesis
Manocha說(shuō),通過(guò)發(fā)表這項(xiàng)工作,科學(xué)家們希望一些開發(fā)自動(dòng)駕駛汽車的公司可以采用同樣的數(shù)據(jù)驅(qū)動(dòng)方法來(lái)改進(jìn)他們自己的仿真模型,用于測(cè)試和評(píng)估自動(dòng)駕駛系統(tǒng)。
參考文獻(xiàn):
[1]W. Li, C. W. Pan, R. Zhang, J. P. Ren, Y. X. Ma, J. Fang, F. L. Yan, Q. C. Geng, X. Y. Huang, H. J. Gong, W. W. Xu, G. P. Wang, D. Manocha, R. G. Yang. AADS: Augmented autonomous driving simulation using data-driven algorithms. Science Robotics, 2019.
-
激光雷達(dá)
+關(guān)注
關(guān)注
971文章
4231瀏覽量
192751 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
788文章
14305瀏覽量
170507
原文標(biāo)題:百度增強(qiáng)現(xiàn)實(shí)自動(dòng)駕駛仿真系統(tǒng)登上 Science Robotics雜志
文章出處:【微信號(hào):IV_Technology,微信公眾號(hào):智車科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
卡車、礦車的自動(dòng)駕駛和乘用車的自動(dòng)駕駛在技術(shù)要求上有何不同?

自動(dòng)駕駛技術(shù)測(cè)試有哪些?

自動(dòng)駕駛技術(shù)落地前為什么要先測(cè)試?
為什么仿真對(duì)于自動(dòng)駕駛來(lái)說(shuō)非常重要?

自動(dòng)駕駛安全基石:ODD
新能源車軟件單元測(cè)試深度解析:自動(dòng)駕駛系統(tǒng)視角
AI將如何改變自動(dòng)駕駛?
一文聊聊自動(dòng)駕駛測(cè)試技術(shù)的挑戰(zhàn)與創(chuàng)新

MEMS技術(shù)在自動(dòng)駕駛汽車中的應(yīng)用
Apollo自動(dòng)駕駛開放平臺(tái)10.0版即將全球發(fā)布
自動(dòng)駕駛汽車安全嗎?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論