") 利用激光雷達(dá)可以通過點(diǎn)云匹配來給車給汽車進(jìn)行定位
利用激光雷達(dá)可以通過點(diǎn)云匹配來給車給汽車進(jìn)行定位
前面介紹了通過 IMU 與GNSS 信號(hào)進(jìn)行融合后組成慣性組合導(dǎo)航系統(tǒng), 下面介紹幾種其他的定位方式以及和IMU的結(jié)合來提高性能。
一,LIDAR定位
利用激光雷達(dá)可以通過點(diǎn)云匹配來給車給汽車進(jìn)行定位,該方法來自于激光雷達(dá)傳感器的檢測數(shù)據(jù)與預(yù)先存在的高精度地圖連續(xù)匹配,通過這種匹配可以獲得汽車在高精度地圖上的全球位置及行駛方向。
匹配點(diǎn)運(yùn)算法很多,幾個(gè)常見的算法有迭代最近點(diǎn),濾波算法以及卡爾曼濾波。
迭代最近點(diǎn)(或IPC)是一種方法。假如我們相對兩次點(diǎn)云掃描進(jìn)行匹配,對第一次掃描的每一個(gè)點(diǎn)我們需要找到另一次掃描中最近的匹配點(diǎn),最終我們會(huì)收都許多匹配點(diǎn)對,將每對點(diǎn)距離誤差相加,然后計(jì)算平均距離誤差。目標(biāo)是通過點(diǎn)云旋轉(zhuǎn)和平移來最大限度地降低這一平均誤差,一旦實(shí)現(xiàn),就可以在傳感器掃描和地圖之間找到匹配,這樣我們將傳感器掃描得到到的位置轉(zhuǎn)換成全球地圖上的位置,并計(jì)算出地圖上的精度位置。
慣導(dǎo)另一個(gè)作用是配合激光雷達(dá)。GPS+慣性導(dǎo)航系統(tǒng)為激光雷達(dá)的空間位置和脈沖發(fā)射姿態(tài)提供高精度定位,建立激光雷達(dá)云點(diǎn)的三維坐標(biāo)系。慣導(dǎo)可用于定位,與其他傳感器融合時(shí),也需要統(tǒng)一到一個(gè)坐標(biāo)系下。定位是最常用的,通過 IMU、慣性導(dǎo)航系統(tǒng)、編碼器和 GPS,得到一個(gè)預(yù)測的全局位置。當(dāng)激光雷達(dá)實(shí)時(shí)掃描單次的點(diǎn)云數(shù)據(jù)后,結(jié)合單次的點(diǎn)云數(shù)據(jù)進(jìn)行匹配,并進(jìn)行特征提取。這些特征包括路沿、車道線、高度等周圍點(diǎn)線面的特征。對于高精度地圖,提取過特征與實(shí)時(shí)提取的特征進(jìn)行匹配,最終得到精準(zhǔn)的車本體速度,這是激光雷達(dá)的定位過程。
濾波算法是LIDAR定位的另一種算法。可消除冗余信息,并在地圖上找最可能的車輛位置. 比如,Apollo采用了直方圖濾波算法(有時(shí)也叫誤差平方和算法(或SSD)),為了利用直方濾波,我們將通過傳感器掃描的點(diǎn)云滑過地圖的每一個(gè)位置,在每個(gè)位置,我們計(jì)算掃描的點(diǎn)和高精度地圖上對應(yīng)點(diǎn)之間的距離誤差或距離,然后對誤差的平方求和,求和的數(shù)越小說明掃描結(jié)果與地圖之間的匹配越好。在下圖的示例中,匹配最好的點(diǎn)顯示紅色,最差的點(diǎn)顯示藍(lán)色,綠色代表適中的點(diǎn)。
卡爾曼濾波是LIDAR的另一種定位方法。卡爾曼濾波是一種算法,用于根據(jù)我們在過去的狀態(tài)和新的傳感器測量的結(jié)果預(yù)測我們當(dāng)前的狀態(tài)。卡爾曼濾波使用了預(yù)測更新周期,首先我們根據(jù)之前的狀態(tài)以及對移動(dòng)距離和方向的估計(jì)來估計(jì)和“預(yù)測”我們新的位置。
一,視覺定位
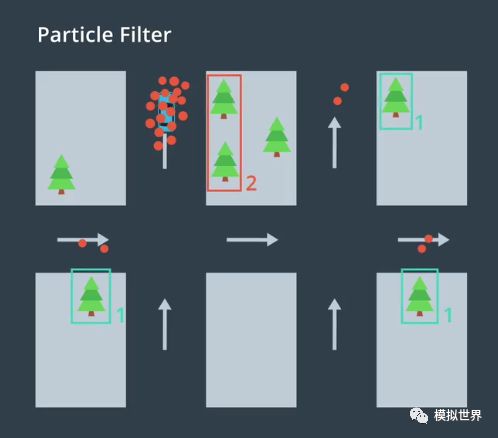
圖像數(shù)據(jù)是收集最容易的數(shù)據(jù),攝像頭便宜且種類繁多,還易于使用,但要用攝像頭來實(shí)現(xiàn)高精度定位是很困難的。但是可以將攝像頭數(shù)據(jù)與地圖和GPS結(jié)合起來,利用概率來判斷攝像頭數(shù)據(jù)與地圖或者GPS等傳感器采集的數(shù)據(jù)做比對,來定位車輛或者障礙物的位置。下圖為利用視覺概率思維來確定樹的位置。
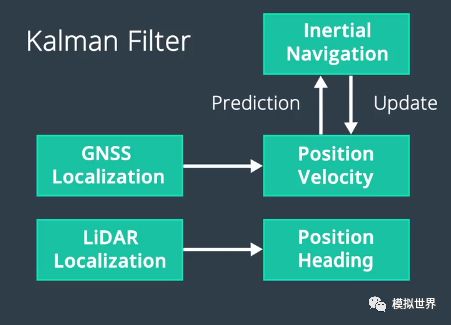
自動(dòng)駕駛系統(tǒng)一般使用基于GPS,IMU和激光雷達(dá)等多種傳感器融合的定位系統(tǒng)。這種融合利用了不同傳感器的互補(bǔ)優(yōu)勢,提高了穩(wěn)定性和準(zhǔn)確性。系統(tǒng)定位模塊依賴于IMU,GPS,激光雷達(dá),雷達(dá)和高精度地圖,這些傳感器同時(shí)支持GNSS定位和LIDAR定位,GNSS定位輸出速度和位置信息,LIDAR定位輸出位置和行進(jìn)方向信息,融合框架通過卡爾曼濾波將這些輸出結(jié)合在一起,卡爾曼濾波建立在兩步預(yù)測測量周期之上。
卡爾曼濾波已成為大多數(shù)定向算法和商用慣性方向傳感器的公認(rèn)基礎(chǔ);Xsens、微應(yīng)變、,矢量導(dǎo)航、InterSense、PNI和十字弓,所有的生產(chǎn)系統(tǒng)都建立在它的基礎(chǔ)上。基于卡爾曼的解決方案的廣泛使用證明了其準(zhǔn)確性和有效性,但是它們有一些缺點(diǎn),它們的實(shí)現(xiàn)是復(fù)雜的,這可以從學(xué)科文獻(xiàn)中看到的眾多解決方案中反映出來。線性回歸迭代是卡爾曼濾波過程的基礎(chǔ),它要求采樣率遠(yuǎn)遠(yuǎn)超過目標(biāo)帶寬(例如,512 Hz之間的采樣率),30千赫對于系統(tǒng)可移植性至關(guān)重要的人體運(yùn)動(dòng)捕獲應(yīng)用程序來說也許是必要的,描述三維旋轉(zhuǎn)運(yùn)動(dòng)學(xué)的狀態(tài)關(guān)系通常需要較大的狀態(tài)向量,擴(kuò)展的卡爾曼濾波實(shí)現(xiàn)將問題線性化。
這些挑戰(zhàn)需要大量的計(jì)算負(fù)荷來實(shí)現(xiàn)基于卡爾曼濾波的解決方案,并提供了一個(gè)明確的結(jié)果。解決這些問題的先前的方法已經(jīng)實(shí)現(xiàn)了模糊處理和頻域?yàn)V波處器,有利于在低角速度下定向的加速度計(jì)和在高角速度下的集成陀螺儀。
總之,慣性導(dǎo)航系統(tǒng)將成為自動(dòng)駕駛定位信息融合的中心。由于慣導(dǎo)具有的輸出信息不間斷、不受外界干擾的獨(dú)特優(yōu)勢,慣導(dǎo)可以在車輛運(yùn)行中提供連續(xù)的測量信息,同時(shí)可以將視覺傳感器、雷達(dá)、激光雷達(dá)、車身系統(tǒng)信息進(jìn)行更深層次的融合,為決策層提供精確可靠的連續(xù)的車輛位置,姿態(tài)的信息,成為定位信息融合的中心。
據(jù)公開報(bào)道,作為百度Apollo的重要合作伙伴,ADI公司的慣性測量單元(IMU)被用于阿波龍系統(tǒng)的慣性導(dǎo)航器件。
-
導(dǎo)航系統(tǒng)
+關(guān)注
關(guān)注
2文章
275瀏覽量
31261 -
激光雷達(dá)
+關(guān)注
關(guān)注
971文章
4213瀏覽量
192300 -
LIDAR
+關(guān)注
關(guān)注
10文章
346瀏覽量
30227
原文標(biāo)題:自動(dòng)駕駛基礎(chǔ)(六十一) -慣性測量單元(IMU)七
文章出處:【微信號(hào):Analog_World,微信公眾號(hào):模擬世界】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論