") 以電機(jī)的最高轉(zhuǎn)速為目的電子齒輪比設(shè)置
以電機(jī)的最高轉(zhuǎn)速為目的電子齒輪比設(shè)置

伺服驅(qū)動(dòng)器的位置控制模式,必須有電子齒輪比功能,才能順利地與伺服控制器配合,其電子齒輪比的設(shè)置有不同的方法和目的,電子齒輪比一般分成分母及分子兩項(xiàng)參數(shù)設(shè)置。
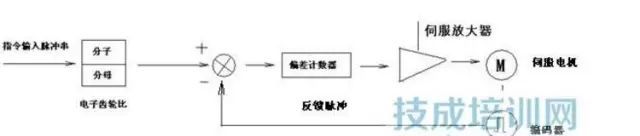
如上圖:從上位機(jī)發(fā)出的指令脈沖串。經(jīng)過(guò)電子齒輪比轉(zhuǎn)換為一定比例的輸入脈沖信號(hào),與編碼器反饋的脈沖信號(hào)相匹配,產(chǎn)生偏差脈沖信號(hào),再經(jīng)過(guò)伺服放大器驅(qū)動(dòng)伺服電機(jī)。
1、以電機(jī)的最高轉(zhuǎn)速為目的電子齒輪比設(shè)置
例如,伺服電機(jī)的額定轉(zhuǎn)速為3000轉(zhuǎn)/分;編碼器的每圈產(chǎn)生的脈沖數(shù)10000脈沖數(shù)/圈。
通常PLC控制器輸出的最高脈沖頻率為100KHZ。
2、計(jì)算說(shuō)明
要達(dá)到伺服電機(jī)額定轉(zhuǎn)速3000轉(zhuǎn)/分,需要輸入的指令脈沖頻率為
10000×3000/60s=500000HZ=500KHZ
3、設(shè)置電子齒輪比
PLC能輸出的最高脈沖頻率為100KHZ,必須與編碼器反饋的脈沖頻率相匹配。
100KHZ×A/B=500KHZ,
A/B=500/100=5/1,即A=5,B=1
式中:
A為電子齒輪比的分子
B為電子齒輪比的分母。
-
放大器
+關(guān)注
關(guān)注
145文章
14147瀏覽量
217317 -
電機(jī)
+關(guān)注
關(guān)注
143文章
9299瀏覽量
149557 -
伺服驅(qū)動(dòng)器
+關(guān)注
關(guān)注
22文章
526瀏覽量
32588
原文標(biāo)題:伺服驅(qū)動(dòng)器電子齒輪比的設(shè)置
文章出處:【微信號(hào):EngicoolArabic,微信公眾號(hào):電子工程技術(shù)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
請(qǐng)問(wèn)變頻電機(jī)的轉(zhuǎn)速最高是多少?
1FK7063-2AF71-1RG1伺服電機(jī)的最高轉(zhuǎn)速是多少?
伺服電機(jī)電子齒輪比計(jì)算方法
根據(jù)電機(jī)額定轉(zhuǎn)速計(jì)算電機(jī)額定轉(zhuǎn)速時(shí)電子齒輪比、脈沖當(dāng)量
齒輪減速機(jī)配電機(jī)如何保持最高轉(zhuǎn)速
高轉(zhuǎn)速電機(jī)的類型和應(yīng)用
一文知道伺服驅(qū)動(dòng)器電子齒輪比的設(shè)置方法
全球最高轉(zhuǎn)速伺服電機(jī)問(wèn)世
汽車電子電驅(qū)動(dòng)高轉(zhuǎn)速齒輪技術(shù)分析






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論